Questions about prior factor covariance

拂石

{kind=link}
Dellaert, Frank
I have two problems and wish to get your help.
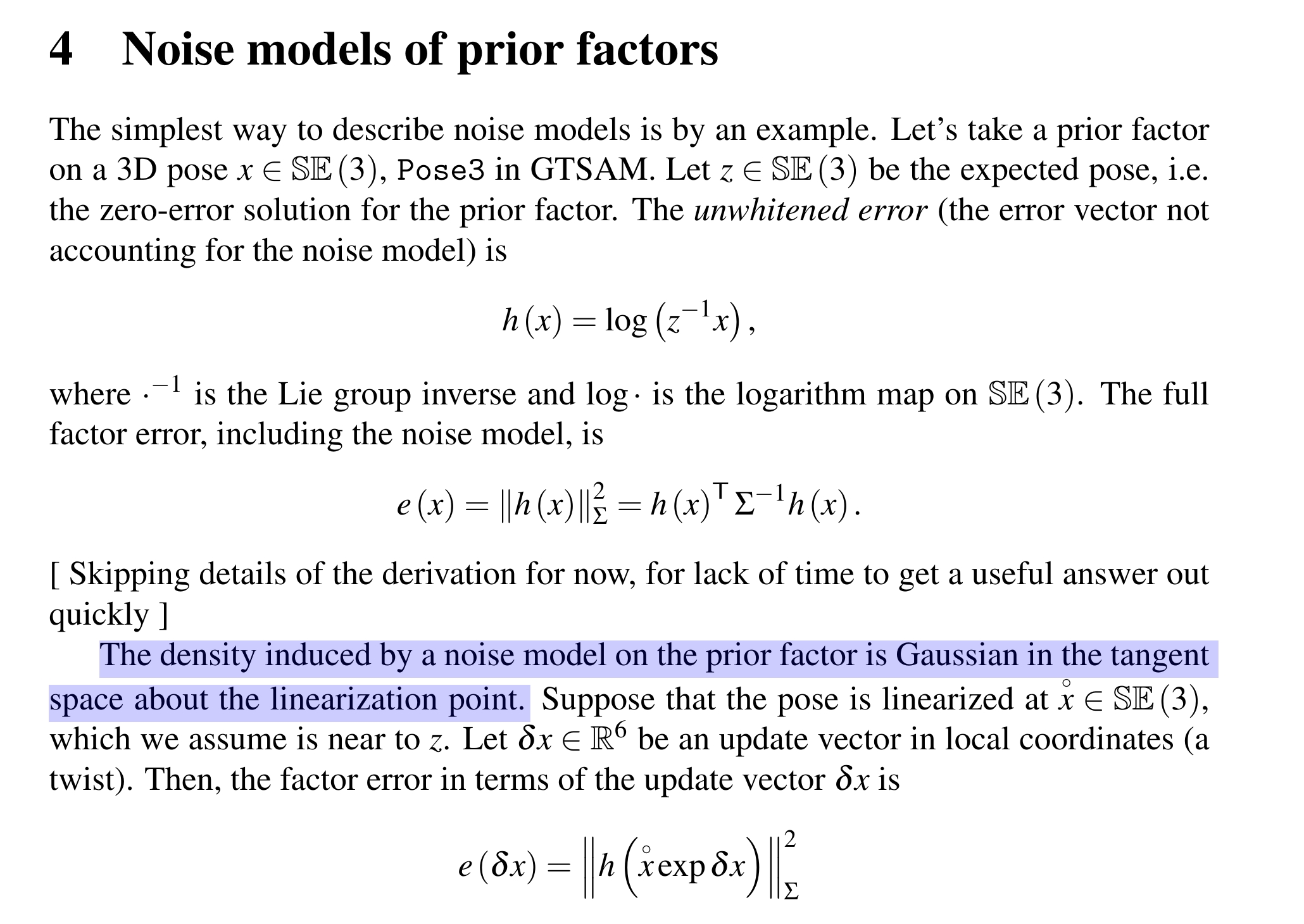
1. Whether diagonal Vec6 in PriorFactor<Pose3> stands for covariance on tangent plane(se3) or (Euler angle + xyz)? As shown in the attachment, it seems to be on tangential plane. However, in many tutorials, it seems to be the latter. I am quite confused.
For small values, these are essentially the same.
2. How could i define such a prior factor to express the full covariance between pose, velocity and bias(got from external LIO estimation, off-diagonal elements are not zero), the tutorial i found seems to ignore the correlation between these states.
Hmmm, interesting puzzle. I think the easiest way to do so is to create an expression factor that concatenates these quantities and puts a full covariance (on the tangent plane). I can’t help with the details of it, look at unit tests in testExpression and testExpressionFactor
Frank