factor choose when the measurement(m) is changed at each iteration
70 views
Skip to first unread message

albert_xu
Feb 18, 2021, 8:30:09 PM2/18/21
to gtsam users
I want to implement ICP in gtsam ,but when I have no idea as the
measurement is always changed with hypothesis in ExpressionFactor .
Actually, I want to perform the algorithm in which ,the measurement is
always changed with hypothesis because I have known the
alignment(hypothesis--measurement) in each iterate.I don’t know which
type factor I can choose?
Thank you for your help, waiting~~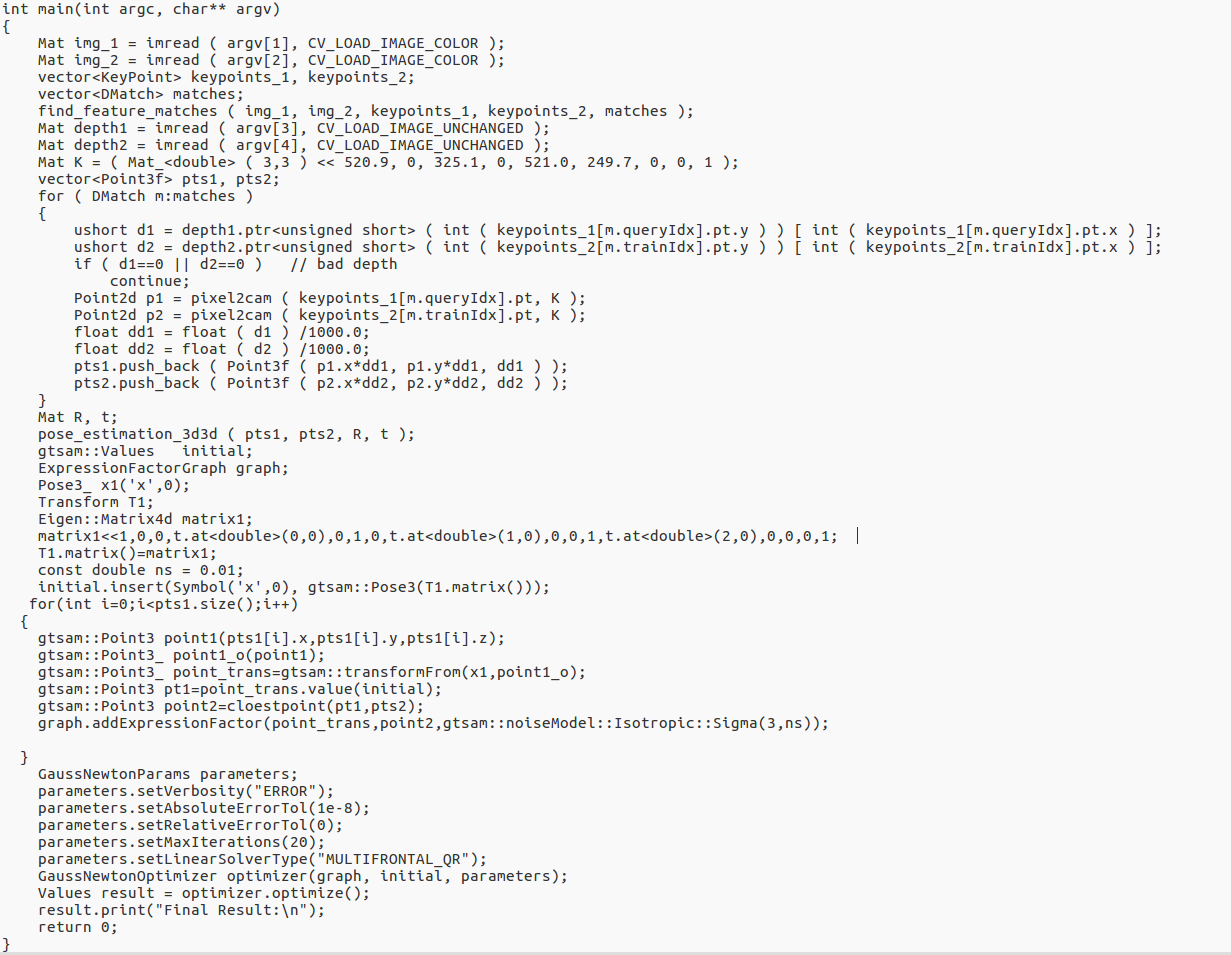

Dellaert, Frank
Feb 18, 2021, 8:36:17 PM2/18/21
to albert_xu, gtsam users
Your post is a bit confusingly worded, so I have no idea what you mean, but there already is a fast, closed form Pose3::Align that does the alignment step for ICP. Similarly, for Sim3, BTW 😉
FD
From: gtsam...@googlegroups.com <gtsam...@googlegroups.com> on behalf of albert_xu <xsx...@gmail.com>
Sent: Thursday, February 18, 2021 20:30
To: gtsam users <gtsam...@googlegroups.com>
Subject: [GTSAM] factor choose when the measurement(m) is changed at each iteration
Sent: Thursday, February 18, 2021 20:30
To: gtsam users <gtsam...@googlegroups.com>
Subject: [GTSAM] factor choose when the measurement(m) is changed at each iteration
I want to implement ICP in gtsam ,but when I have no idea as the measurement is always changed with hypothesis in ExpressionFactor .
Actually, I want to perform the algorithm in which ,the measurement is always changed with hypothesis because I have known the alignment(hypothesis--measurement) in each iterate.I don’t know which type factor I can choose?
Thank you for your help, waiting~~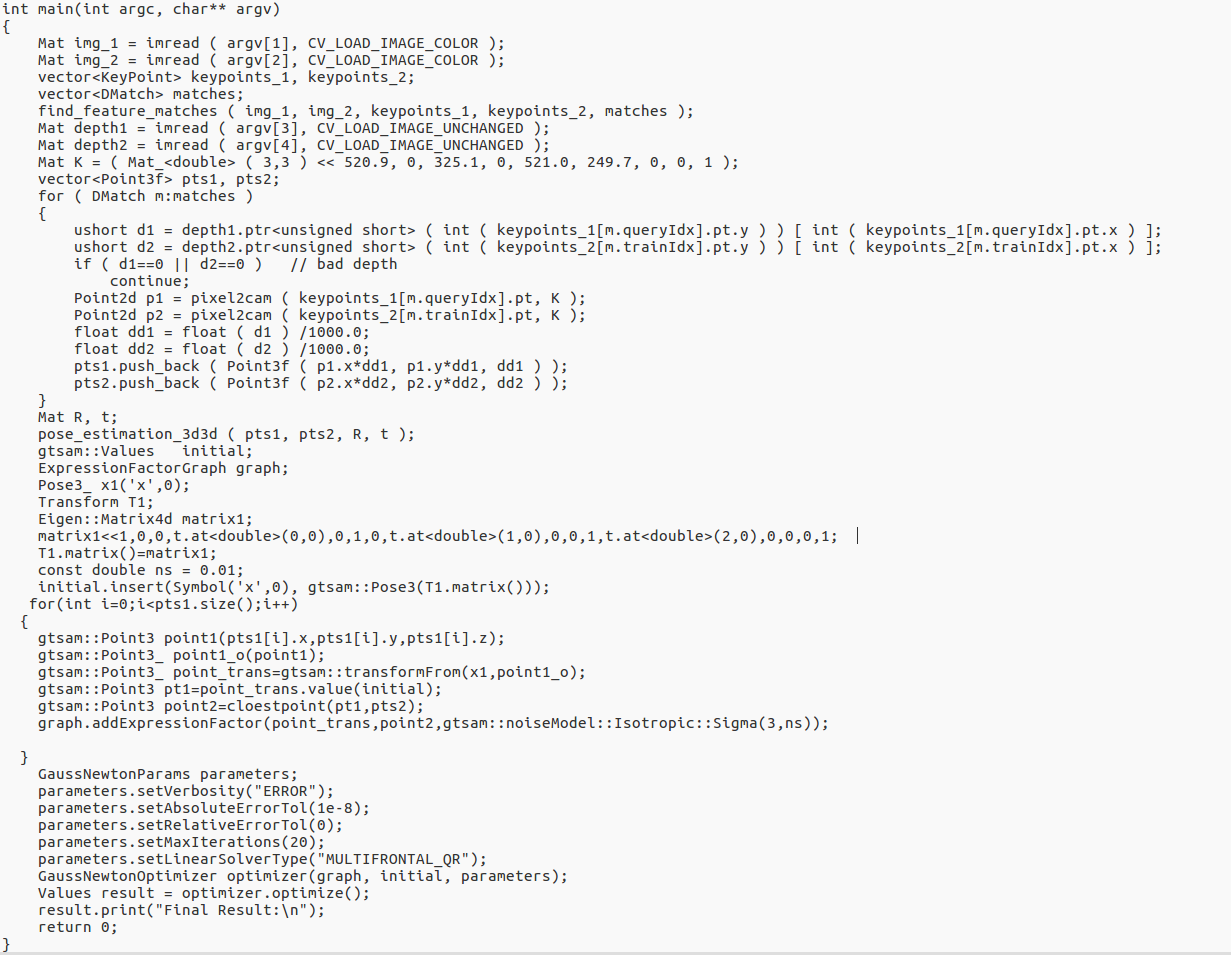
--
You received this message because you are subscribed to the Google Groups "gtsam users" group.
To unsubscribe from this group and stop receiving emails from it, send an email to gtsam-users...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/gtsam-users/99f18795-23c0-438a-91cb-ee17b14a244cn%40googlegroups.com.
You received this message because you are subscribed to the Google Groups "gtsam users" group.
To unsubscribe from this group and stop receiving emails from it, send an email to gtsam-users...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/gtsam-users/99f18795-23c0-438a-91cb-ee17b14a244cn%40googlegroups.com.
albert_xu
Feb 18, 2021, 8:52:42 PM2/18/21
to gtsam users
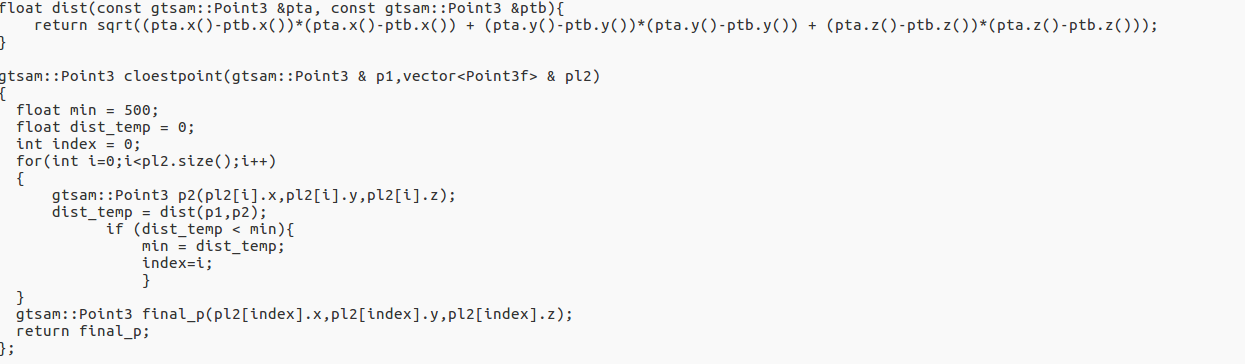
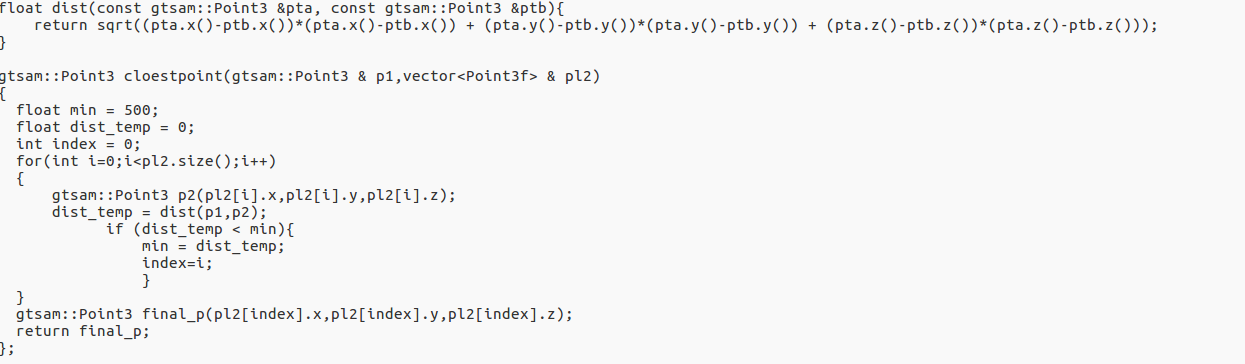
Sorry. What I want to expressed is that I want to use factor to set up a constraint ,but I don't know choose which factors that have defined in gtsam. In this code ,I used ExpressionFactor ,but I found in this function, the second parameter(measurement) needs to be fixed. But I want to this parameter can be changed in graph at every iteration(update). These are my main puzzle. I perform ICP in gstam, as alignment in it is dynamic.
Reply all
Reply to author
Forward
0 new messages