Re: [google-cartographer] what's wrong about my configuration for 2d Laserscan and IMU?
1,395 views
Skip to first unread message

Holger Rapp
Apr 7, 2017, 9:55:53 AM4/7/17
to libin sui, google-cartographer
On Fri, Apr 7, 2017 at 1:01 PM, libin sui <bygr...@gmail.com> wrote:
At my test project, I have made all sensors correctly sending data to cartographer, but the output of TF is always not correct, and which make the map is not being generated.Could anyone help me to check where is wrong? Let me learn from your answer. thanks a lot!
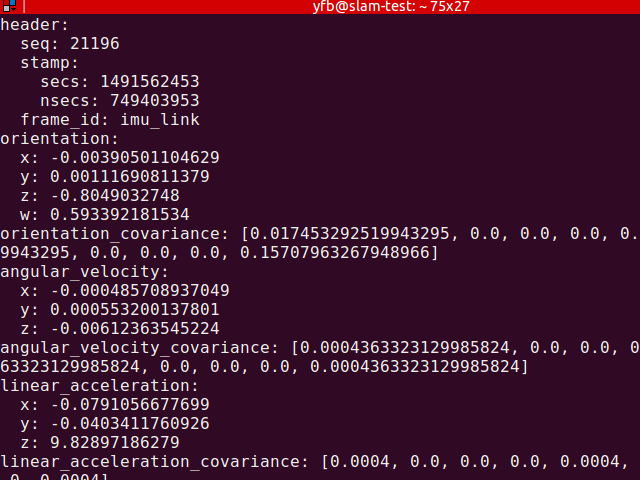
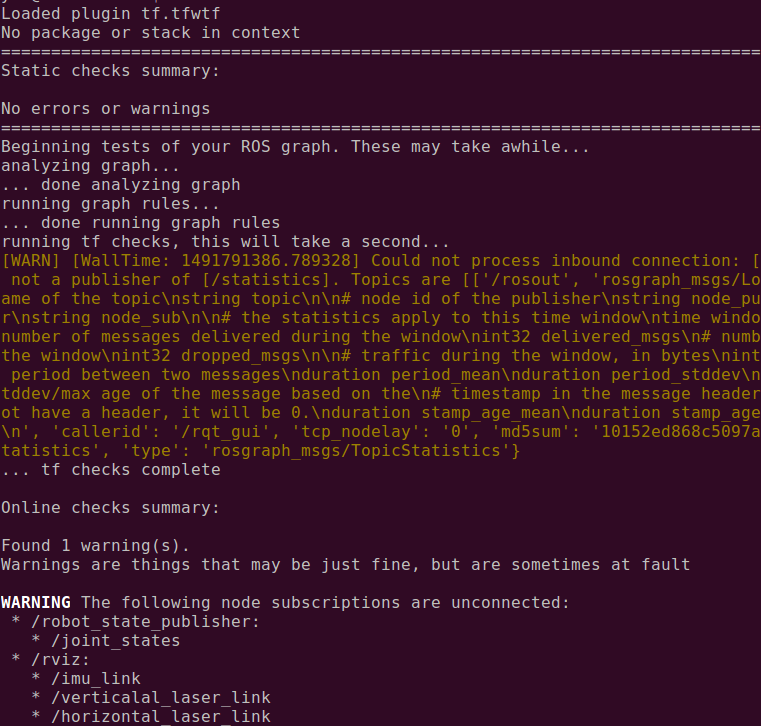
The screenshot you send shows that your IMU is giving reasonable data. The problem is probably somewhere else - have you run roswtf? I guess the problem is also probably not related to cartographer, but to ROS - so you might get better answers asking at answers.ros.org.
--
You received this message because you are subscribed to the Google Groups "google-cartographer" group.
To unsubscribe from this group and stop receiving emails from it, send an email to google-cartographer+unsub...@googlegroups.com.
To post to this group, send email to google-cartographer@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/google-cartographer/8aa519a0-6345-40df-a0c8-a76f82b83674%40googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
Google Germany GmbH
Erika-Mann-Straße 33
80331 München
Registergericht und -nummer: Hamburg, HRB 86891
Sitz der Gesellschaft: Hamburg
Geschäftsführer: Matthew Scott Sucherman, Paul Terence Manicle

libin sui
Apr 7, 2017, 10:02:48 AM4/7/17
to google-cartographer, bygr...@gmail.com
Sorry, I canceled this post since I found some doubts need to check again. If I could not fix it, I would come again.
在 2017年4月7日星期五 UTC+8下午9:55:53,Holger Rapp写道:
在 2017年4月7日星期五 UTC+8下午9:55:53,Holger Rapp写道:
On Fri, Apr 7, 2017 at 1:01 PM, libin sui <bygr...@gmail.com> wrote:At my test project, I have made all sensors correctly sending data to cartographer, but the output of TF is always not correct, and which make the map is not being generated.Could anyone help me to check where is wrong? Let me learn from your answer. thanks a lot!The screenshot you send shows that your IMU is giving reasonable data. The problem is probably somewhere else - have you run roswtf? I guess the problem is also probably not related to cartographer, but to ROS - so you might get better answers asking at answers.ros.org.
--
You received this message because you are subscribed to the Google Groups "google-cartographer" group.
To unsubscribe from this group and stop receiving emails from it, send an email to google-cartographer+unsub...@googlegroups.com.
To post to this group, send email to google-ca...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/google-cartographer/8aa519a0-6345-40df-a0c8-a76f82b83674%40googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
libin sui
Apr 9, 2017, 11:30:28 PM4/9/17
to google-cartographer, bygr...@gmail.com




![]()
I still meet the same question about i have not get the generated map. And I will descript all my status for you
Device:
1. Two Hokuyo Laserscan, UTM-30LX, but at current, I just used one which is placed as horizontal laser scan.
2. xsen IMU.
Configurtion:
Launch file
<launch>
<param name="robot_description"
textfile="$(find cartographer_ros)/urdf/hokuyo_2d_imu.urdf" />
<arg name="debugger" default="" />
<!-- <param name="publish_frequency" type="double" value="200"/> -->
<!-- <param name="use_tf_static" type="bool" value="false"/> -->
<param name="enable_statistics" type="bool" value="false"/>
<node name="robot_state_publisher" pkg="robot_state_publisher"
type="robot_state_publisher" />
<node pkg="urg_node" type="urg_node" name="hokuyo_UTM_30LX_h" output="screen">
<param name="ip_address" value="192.168.20.10"/>
<param name="frame_id" value="horizontal_laser_link"/>
<param name="calibrate_time" type="bool" value="false"/>
<param name="intensity" type="bool" value="false"/>
<param name="cluster" value="1"/>
<param name="publish_intensity" value = "false"/>
<param name="publish_multiecho" value = "false"/>
<remap from="scan" to="scan" />
</node>
<!--
<node pkg="urg_node" type="urg_node" name="hokuyo_UTM_30LX_v" output="screen">
<param name="ip_address" value="192.168.0.10"/>
<param name="frame_id" value="vertical_laser_link"/>
<param name="calibrate_time" type="bool" value="true"/>
<param name="intensity" type="bool" value="false"/>
<param name="cluster" value="1"/>
<param name="publish_intensity" value = "false"/>
<param name="publish_multiecho" value = "false"/>
<remap from="scan" to="scan" />
</node>
-->
<!--
<node pkg="hokuyo_node" type="hokuyo_node" name="hokuyo_URG_04LX" output="screen">
<param name="calibrate_time" type="bool" value="false"/>
<param name="port" type="string" value="/dev/ttyACM0"/>
<param name="intensity" type="bool" value="false"/>
<param name="frameid" value="vertical_laser_link"/>
<param name="port" type="string" value="/dev/ttyACM0"/>
</node>
-->
<node name="xsens_driver" pkg="xsens_driver"
type="mtnode.py"
output="screen" >
<param name="device" value="/dev/ttyS0"/>
<param name="baudrate" value="115200"/>
<param name="frame_id" value="imu_link"/>
<param name="frame_local" value="NWU"/>
<remap from="imu" to="imu" />
</node>
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory
$(find cartographer_ros)/configuration_files
-configuration_basename hokuyo_2d_imu.lua"
output="screen"
launch-prefix="$(arg debugger)" >
<!-- launch-prefix="$(arg debugger)" -->
<!-- <remap from="scan" to="horizontal_laser_2d" /> -->
<!-- <remap from="imu" to="/imu/data" /> -->
</node>
<node name="rviz" pkg="rviz" type="rviz" required="true"
args="-d $(find cartographer_ros)/configuration_files/hokuyo_2d_imu.rviz">
</node>
<!-- DEBUG -->
<node name="rqt_gui" pkg="rqt_gui" type="rqt_gui"/>
</launch>
lua file
include "map_builder.lua"
options = {
map_builder = MAP_BUILDER,
map_frame = "map",
tracking_frame = "base_link",
published_frame = "base_link",
odom_frame = "odom",
provide_odom_frame = true,
use_odometry = false,
use_laser_scan = true,
use_multi_echo_laser_scan = false,
num_point_clouds = 0,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
}
MAP_BUILDER.use_trajectory_builder_2d = true
MAP_BUILDER.num_background_threads = 7
TRAJECTORY_BUILDER_2D.use_imu_data = true
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true
TRAJECTORY_BUILDER_2D.laser_min_range = 0.2
TRAJECTORY_BUILDER_2D.laser_max_range = 30.
--TRAJECTORY_BUILDER_2D.laser_missing_echo_ray_length = 0.2
--TRAJECTORY_BUILDER_2D.submaps.resolution = 0.4
--TRAJECTORY_BUILDER_2D.submaps.output_debug_images = true
SPARSE_POSE_GRAPH.optimize_every_n_scans = 35
SPARSE_POSE_GRAPH.constraint_builder.min_score = 0.65
SPARSE_POSE_GRAPH.constraint_builder.global_localization_min_score = 0.7
return options
URDF file
<robot name="cartographer_backpack_2d">
<material name="orange">
<color rgba="1.0 0.5 0.2 1" />
</material>
<material name="gray">
<color rgba="0.2 0.2 0.2 1" />
</material>
<link name="imu_link">
<visual>
<origin xyz="0 0 0" />
<geometry>
<box size="0.06 0.04 0.02" />
</geometry>
<material name="orange" />
</visual>
</link>
<link name="horizontal_laser_link">
<visual>
<origin xyz="0 0 0" />
<geometry>
<cylinder length="0.05" radius="0.03" />
</geometry>
<material name="gray" />
</visual>
</link>
<link name="vertical_laser_link">
<visual>
<origin xyz="0 0 0" />
<geometry>
<cylinder length="0.05" radius="0.03" />
</geometry>
<material name="gray" />
</visual>
</link>
<link name="base_link" />
<joint name="imu_link_joint" type="fixed">
<parent link="base_link" />
<child link="imu_link" />
<origin xyz="0 0 0" />
</joint>
<joint name="horizontal_laser_link_joint" type="fixed">
<parent link="base_link" />
<child link="horizontal_laser_link" />
<origin xyz="0.2 0 0" />
</joint>
<joint name="vertical_laser_link_joint" type="fixed">
<parent link="base_link" />
<child link="vertical_laser_link" />
<origin rpy="0 -1.570796 3.1415923" xyz="0.2 0 0.3" />
</joint>
</robot>
RVIZ File
Panels:
- Class: rviz/Displays
Help Height: 78
Name: Displays
Property Tree Widget:
Expanded:
- /Submaps1
- /PointCloud21
Splitter Ratio: 0.600671
Tree Height: 821
- Class: rviz/Selection
Name: Selection
- Class: rviz/Tool Properties
Expanded:
- /2D Pose Estimate1
- /2D Nav Goal1
- /Publish Point1
Name: Tool Properties
Splitter Ratio: 0.588679
- Class: rviz/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
- Class: rviz/Time
Experimental: false
Name: Time
SyncMode: 0
SyncSource: PointCloud2
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 1
Class: rviz/Grid
Color: 160; 160; 164
Enabled: true
Line Style:
Line Width: 0.03
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XY
Plane Cell Count: 100
Reference Frame: <Fixed Frame>
Value: true
- Class: rviz/TF
Enabled: true
Frame Timeout: 15
Frames:
All Enabled: true
base_link:
Value: true
horizontal_laser_link:
Value: true
imu_link:
Value: true
map:
Value: true
odom:
Value: true
vertical_laser_link:
Value: true
Marker Scale: 1
Name: TF
Show Arrows: true
Show Axes: true
Show Names: true
Tree:
map:
odom:
base_link:
horizontal_laser_link:
{}
imu_link:
{}
vertical_laser_link:
{}
Update Interval: 0
Value: true
- Alpha: 1
Class: rviz/RobotModel
Collision Enabled: false
Enabled: true
Links:
All Links Enabled: true
Expand Joint Details: false
Expand Link Details: false
Expand Tree: false
Link Tree Style: Links in Alphabetic Order
base_link:
Alpha: 1
Show Axes: false
Show Trail: false
horizontal_laser_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
imu_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
vertical_laser_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
Name: RobotModel
Robot Description: robot_description
TF Prefix: ""
Update Interval: 0
Value: true
Visual Enabled: true
- Class: Submaps
Enabled: true
Map frame: map
Name: Submaps
Submap query service: /submap_query
Topic: /submap_list
Tracking frame: base_link
Unreliable: false
Value: true
- Alpha: 1
Autocompute Intensity Bounds: true
Autocompute Value Bounds:
Max Value: 10
Min Value: -10
Value: true
Axis: Z
Channel Name: intensity
Class: rviz/PointCloud2
Color: 255; 85; 255
Color Transformer: FlatColor
Decay Time: 0
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
Max Intensity: 4096
Min Color: 0; 0; 0
Min Intensity: 0
Name: PointCloud2
Position Transformer: XYZ
Queue Size: 10
Selectable: true
Size (Pixels): 3
Size (m): 0.05
Style: Flat Squares
Topic: /scan_matched_points2
Unreliable: false
Use Fixed Frame: true
Use rainbow: true
Value: true
- Alpha: 1
Autocompute Intensity Bounds: true
Autocompute Value Bounds:
Max Value: 10
Min Value: -10
Value: true
Axis: Z
Channel Name: intensity
Class: rviz/LaserScan
Color: 0; 255; 127
Color Transformer: FlatColor
Decay Time: 0
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
Max Intensity: 4096
Min Color: 0; 0; 0
Min Intensity: 0
Name: horizontal_laser_link
Position Transformer: XYZ
Queue Size: 10
Selectable: true
Size (Pixels): 3
Size (m): 0.02
Style: Flat Squares
Topic: /horizontal_laser_link
Unreliable: false
Use Fixed Frame: true
Use rainbow: true
Value: true
- Alpha: 1
Autocompute Intensity Bounds: true
Autocompute Value Bounds:
Max Value: 10
Min Value: -10
Value: true
Axis: Z
Channel Name: intensity
Class: rviz/LaserScan
Color: 85; 170; 255
Color Transformer: FlatColor
Decay Time: 0
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
Max Intensity: 4096
Min Color: 0; 0; 0
Min Intensity: 0
Name: verticalal_laser_link
Position Transformer: XYZ
Queue Size: 10
Selectable: true
Size (Pixels): 3
Size (m): 0.01
Style: Flat Squares
Topic: /verticalal_laser_link
Unreliable: false
Use Fixed Frame: true
Use rainbow: true
Value: true
- Acceleration properties:
Acc. vector alpha: 1
Acc. vector color: 170; 170; 255
Acc. vector scale: 0.03
Derotate acceleration: true
Enable acceleration: false
Axes properties:
Axes scale: 0.2
Enable axes: true
Box properties:
Box alpha: 1
Box color: 255; 113; 11
Enable box: true
x_scale: 0.06
y_scale: 0.04
z_scale: 0.02
Class: rviz_imu_plugin/Imu
Enabled: true
Name: Imu
Topic: /imu_link
Unreliable: false
Value: true
Enabled: true
Global Options:
Background Color: 100; 100; 100
Fixed Frame: map
Frame Rate: 30
Name: root
Tools:
- Class: rviz/Interact
Hide Inactive Objects: true
- Class: rviz/MoveCamera
- Class: rviz/Select
- Class: rviz/FocusCamera
- Class: rviz/Measure
- Class: rviz/SetInitialPose
Topic: /initialpose
- Class: rviz/SetGoal
Topic: /move_base_simple/goal
- Class: rviz/PublishPoint
Single click: true
Topic: /clicked_point
Value: true
Views:
Current:
Class: rviz/XYOrbit
Distance: 10
Enable Stereo Rendering:
Stereo Eye Separation: 0.06
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Focal Point:
X: 0
Y: 0
Z: 0
Name: Current View
Near Clip Distance: 0.01
Pitch: 0.725398
Target Frame: <Fixed Frame>
Value: XYOrbit (rviz)
Yaw: 2.8754
Saved: ~
Window Geometry:
Displays:
collapsed: false
Height: 876
Hide Left Dock: false
Hide Right Dock: false
QMainWindow State: 000000ff00000000fd0000000400000000000001c5000003c0fc0200000008fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000006400fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c0061007900730100000041000003c0000000dd00fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261000000010000010f000003c0fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a005600690065007700730100000041000003c0000000b000fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e100000197000000030000077e0000003efc0100000002fb0000000800540069006d006501000000000000077e000002f600fffffffb0000000800540069006d006501000000000000045000000000000000000000049e000003c000000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed: false
Time:
collapsed: false
Tool Properties:
collapsed: false
Views:
collapsed: false
Width: 1918
X: 0
Y: 24
Status:





Question:
1. Position and attitude not changed when moving them.
2. All data are looks like working correctly, but map is not being generated when moveing them.
3. the information of odom_combine is wrong, but i d'not know how to fix it.
I had put the source file and all bag data at https://drive.google.com/open?id=0B8Ugkw-ov7hqSUdmT3BMNjRKZ3M
Thank all again.
End!
BR
Bygreencn
libin sui
Apr 10, 2017, 2:15:38 AM4/10/17
to google-cartographer, bygr...@gmail.com

from rostopic echo /tf
i got the following response, it seems like thr transform has been added to vertical_laser_link.
Thank all again.
BR
Bygreencn
libin sui
Apr 10, 2017, 3:14:06 AM4/10/17
to google-cartographer, bygr...@gmail.com

Reply all
Reply to author
Forward
0 new messages