First flight test with a ublox M8 GPS

Peter Plischka
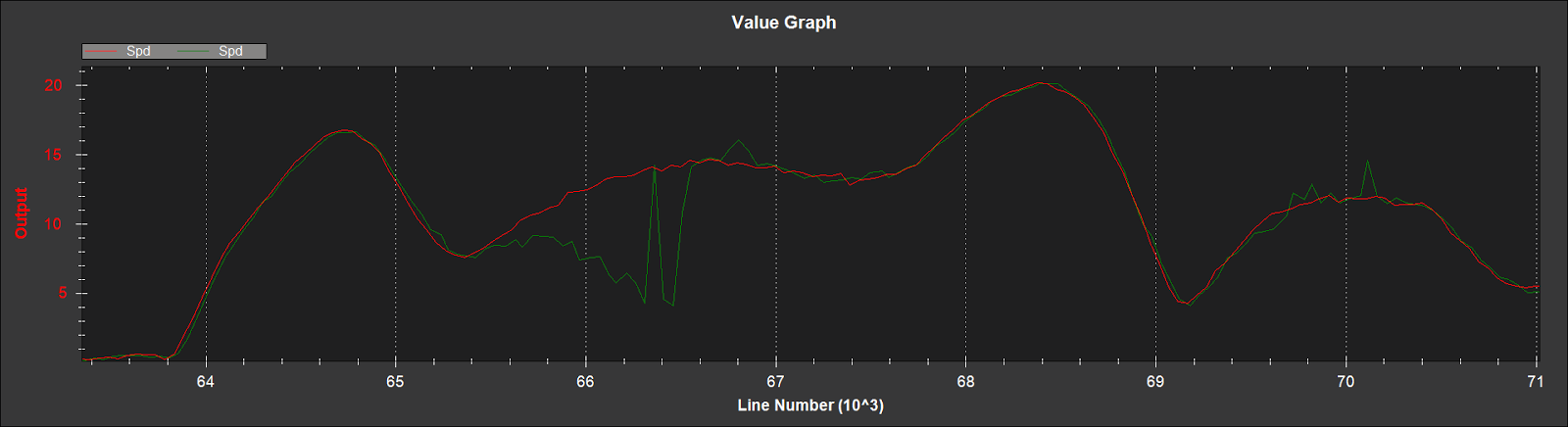
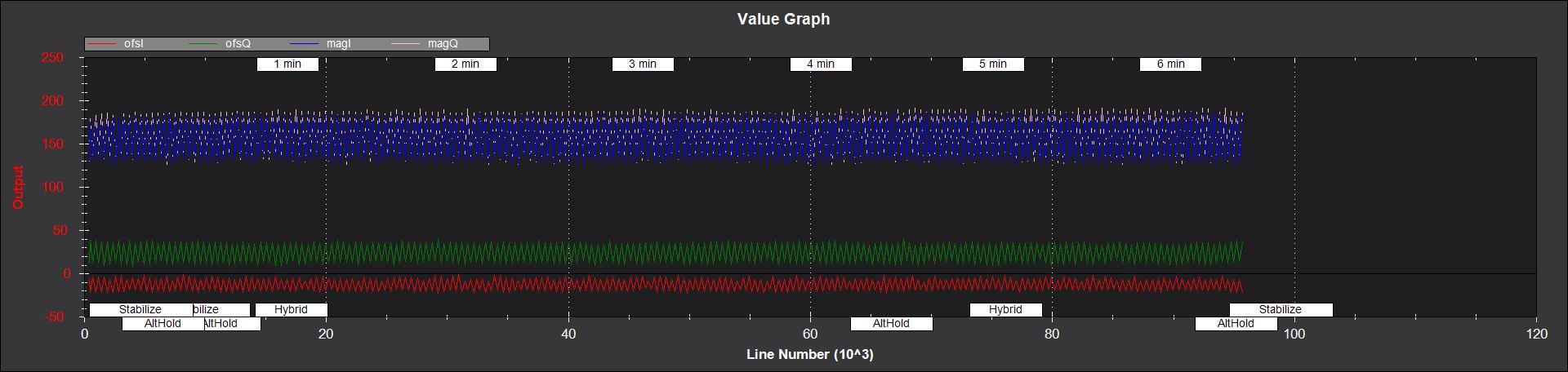
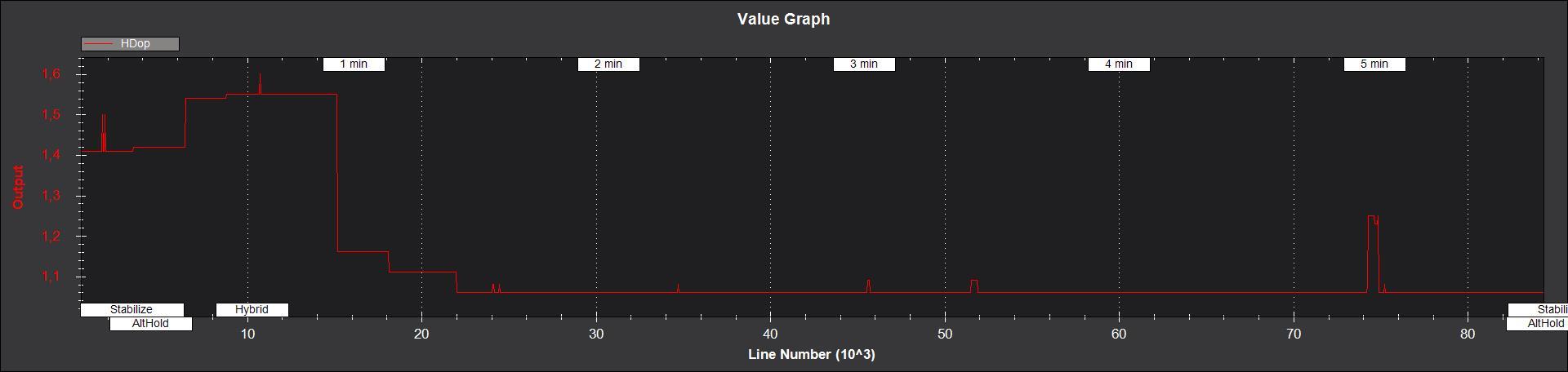
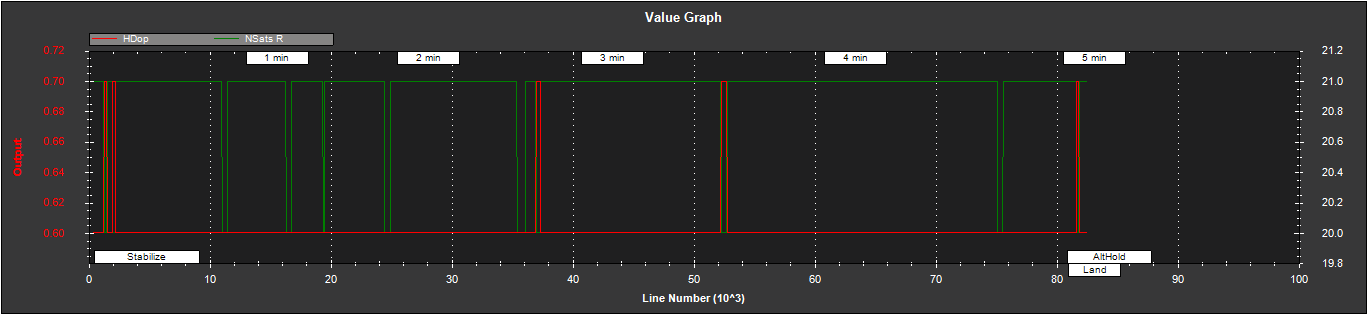
attached a log file from a flight with a ublox M8 GPS and a 3DR ublox 6 GPS.
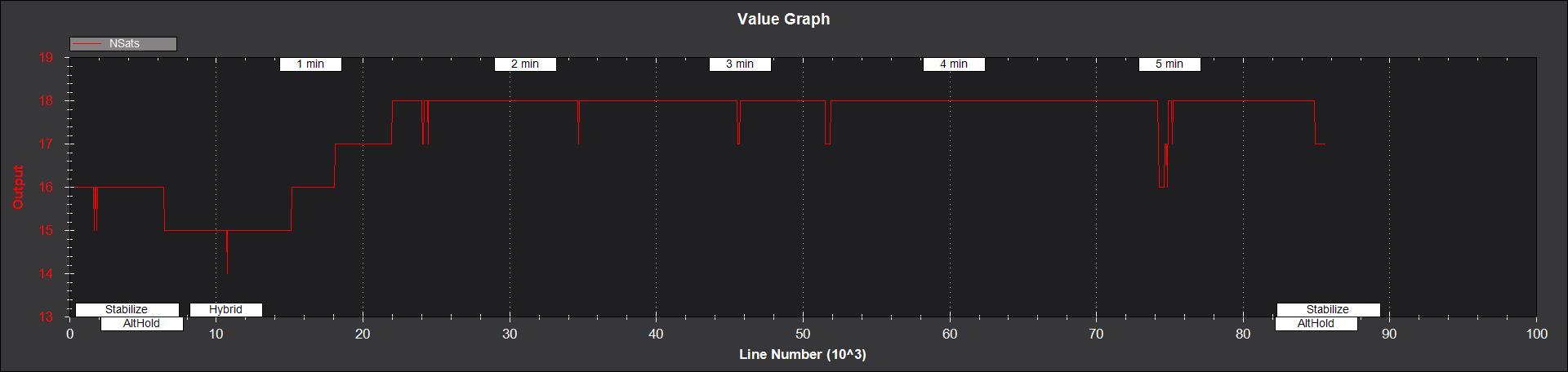
Between the houses a maximum of 13 Sats were achieved with the M8.
The ublox 6 had reached a maximum of 8 Sats.
The copter was very good in the air in hybrid mode.
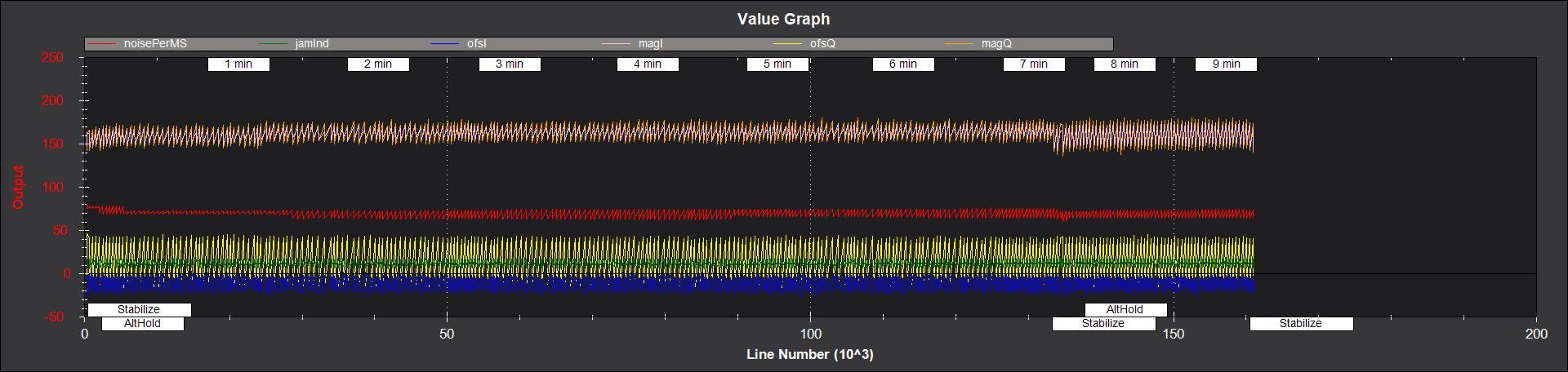
The values of ofsl ofsQ magl magQ look completely different than a ublox 6
@ Paul
It was the version e924da4fec871ec5f0df4c786d9ef2d124f8e0b6
regards Peter

Julien Dubois
From your log, the flight seems not very agressive and it would be interesting to see how the GPS module works in hard conditions
cf. Andrew's post here: http://diydrones.com/profiles/blogs/ublox-m8-series-gps-glonass-receiver-test
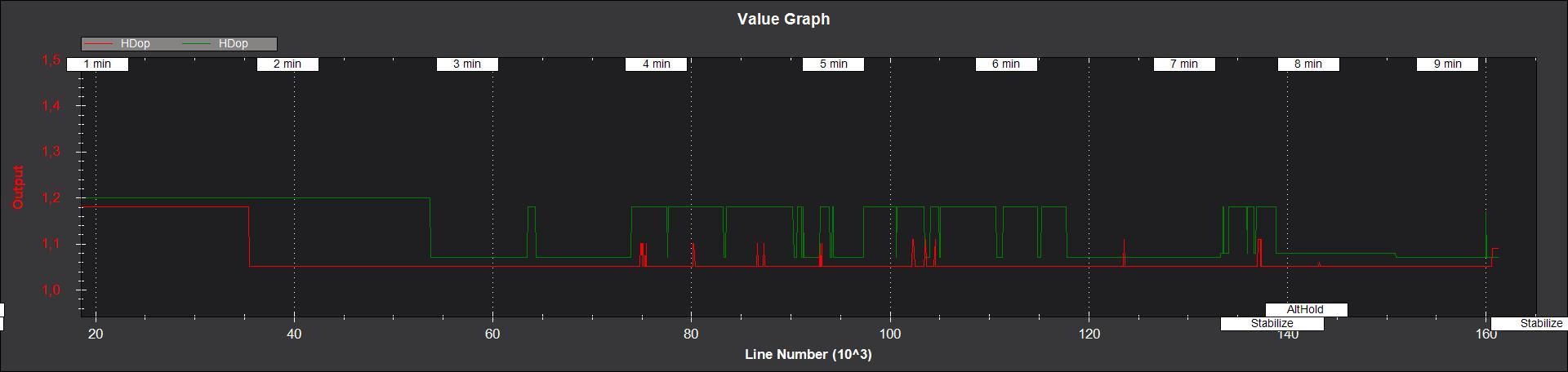
Still from you log, HDop was very bad at the beginning even with 8 sats.
Finally, Hybrid should be usefull to test GPS in hard condition as it's the more agressive flight mode that relies on GPS imo... so your choice for this test was the right one!
Where have you got the M8 module? Is it something like http://www.csgshop.com/product.php?id_product=170
Julien
Peter Plischka
Hello Julien.
It is this one:
http://www.csgshop.com/product.php?id_product=171
Unfortunately, here in front of the house is not enough space for a longer flight.
I'll try later on a larger area.
With enough Sats the accuracy is very good. Yesterday it was 15 Sats and HDOP of 1.16
regards Peter

john...@gmail.com
- JAB

Cornel Fudulu

Paul Riseborough
http://en.wikipedia.org/wiki/Dilution_of_precision_%28GPS%29
and is not an absolute accuracy (for example two receivers could have the same HDOP, but one could have better range accuracy and therefore better positional accuracy). HDOP as reported by UBlox does not appear to conform to this convention.
There isn't much value comparing HDOP values between different models of receiver. A better test would be to put two receivers side by side in a static test (with the same level of motion filtering selected) and compare the movement in their solutions over time.

Randy Mackay
I wonder if it might help if MichaelO added the ability to graph the 2nd GPS’s positions in the KMZ/KML files that the mission planner produces or when you click on the “show map” in the dataflash log viewer. I’m not totally sure if it’s necessary or if it’s only something that developers really care about and it would just add complexity and confusion for normal users.
-Randy
--
You received this message because you are subscribed to the Google Groups "drones-discuss" group.
To unsubscribe from this group and stop receiving emails from it, send an email to drones-discus...@googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
Peter Plischka
Hi Randy,
I think it's a good idea if we could graph information in the dataflash log viewer for both GPS Modules .
So then everyone has the opportunity two different GPS modules, or two identical modules in another location, easy to compare.
This function needs only in the advanced view available.
regards Peter
Peter Plischka
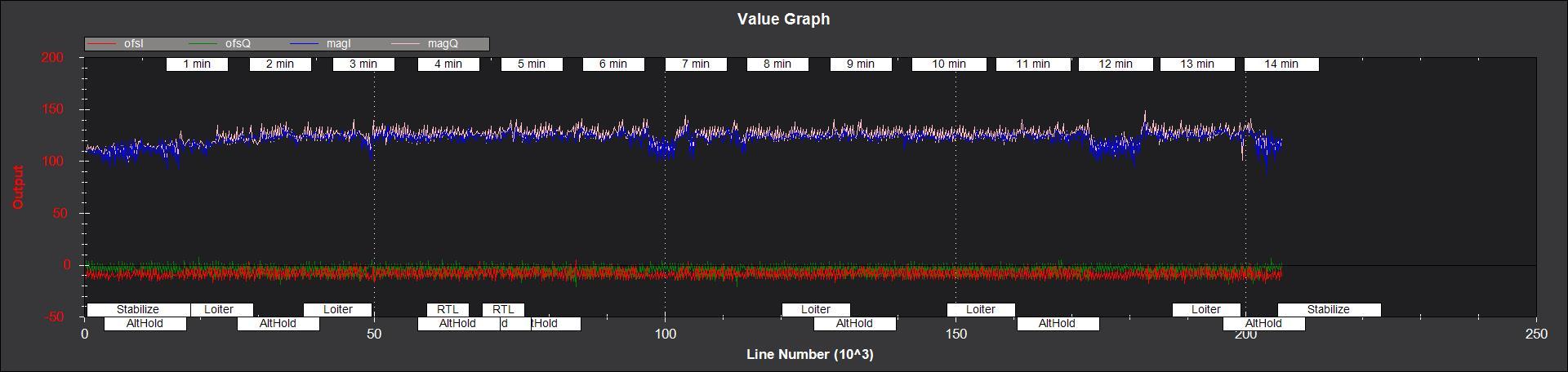
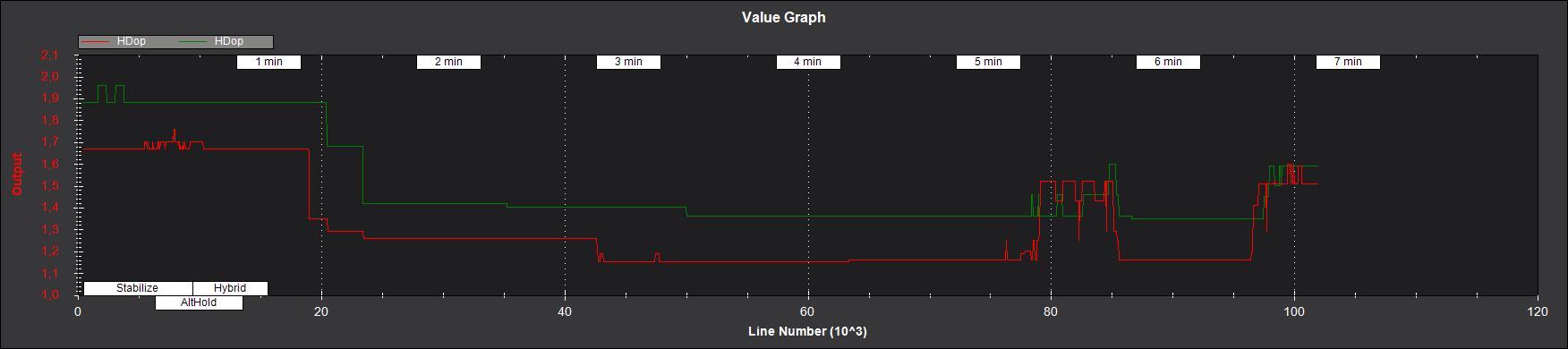
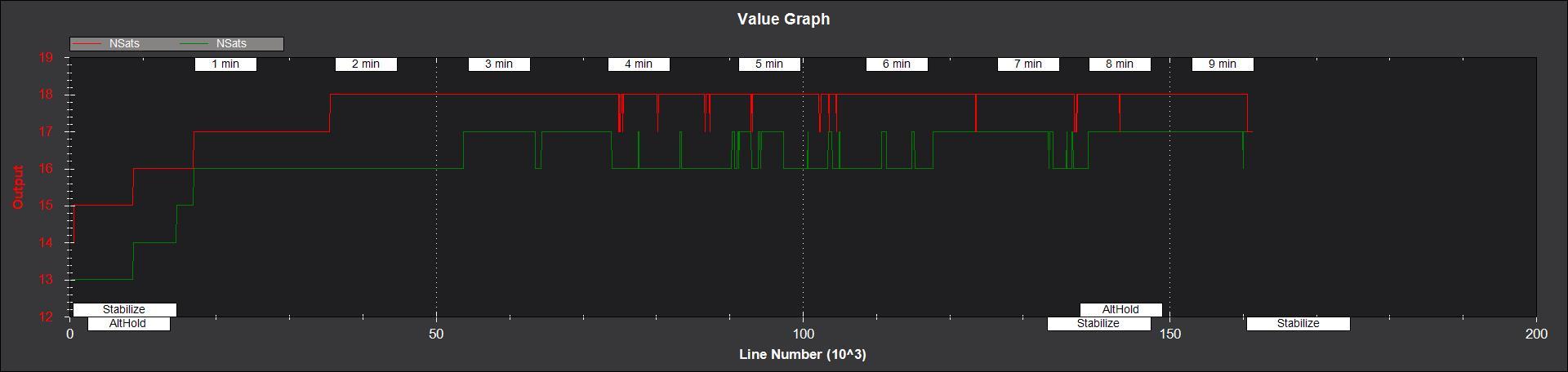
Here are two logs with the M8 and a ublox-6 module.
Once a fast flight and then a longer loiter.
With Loiter 19 Sats were obtained with a HDOP of 1.19.
In fast flight there were 18 Sats with a HDOP of 1.06
The video shows that the hexa is very good over a period of 11 min on the spot.
https://www.youtube.com/watch?v=bN8JwNQk_a8
Compared to the flights with the ublox-6 module I am very satisfied.
regards Peter
Julien Dubois
--
You received this message because you are subscribed to a topic in the Google Groups "drones-discuss" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/drones-discuss/r7gREVd3Ilw/unsubscribe.
To unsubscribe from this group and all its topics, send an email to drones-discus...@googlegroups.com.
Peter Plischka
Julien,
I am looking forward to your test results.
The delivery from csgshop.com to Germany took only 4 days.
I'm going to order a few more for my other Copters.
regards Peter

Tom Coyle
Peter Plischka
Hi Tom,
No I have not. It is much easier to adjust the few values manually.
I have:
PRT (ports) UART 1 Protocol out UBX Baudrate 38400 RATE (Rates) Measurement Period 200 ms Measurement Frequency 5 Hz NAV5 (Navigation 5) Dynamic Model Airborn 4G Fix Mode 3 - Auto 2D/3D Min SV Elevation 10 Grad DGPS Timeout 120 sec SBAS Subsystem Enabled PRN Codes EGNOS (EUROPE) 120, 124, 126, 131
regards Peter
Tom Coyle
Peter Plischka
No Problem Tom,
I am very happy with the M8. I get even in difficult situations (between trees and houses) more than 11 Sats. HDOP is between 100 and 200 cm.
With the ublox-6 I had only 6 Sats and was not as happy with the Loiter and Hybrid.
In an open area there are about 20 Sats.
Meanwhile, I have loaded all my copter with the M8, as the backup there is still a ublox-6 installed.
regards Peter
Tom Coyle
Peter Plischka
Then yes you live in a good GPS area.
With the ublox-6 I've never had more than 9 Sats in the wild.
I usually fly in an area with houses and get to 5-6 Sats.
For me, the M8 is a great help.
I have ordered one with the helix antenna. and look forward to the comparison with the patch antenna.
Believed to be the helical antenna will not be as well suited for Copter or airplanes because of stronger directivity.
Could be interesting for your Rover.
regards Peter
Julien Dubois
--
regards Peter
Peter Plischka
Hi Julien,
but that is a shame. The shop sents unfortunately only in a plain paper envelope.
Whether they are serious, I do not know. There is no Impressum in the shop and mails are not answered.
Another shop for the M8 I have not found it yet.
regards Peter

Łukasz Wasik
Peter Plischka
Hello Lukasz,
for the few values you do not need a configuration file.
You just have to change the following values:
Łukasz Wasik
Paul Riseborough

Ben Nizette
GPS/Beidou receivers and came to a similar (but far less rigorous!)
conclusion. In our case, dynamic maneuvers were putting low-elevation
satellites out of the FoV of the antenna, causing jumps in the
position solution. By increasing the software mask angle we can
simply ignore the SVs that are at highest risk of this and exclude
them from the solution entirely. Essentially we're sacrificing
accuracy for consistency but with enough sats, the trade-off seems
acceptable.
Ben.
> You received this message because you are subscribed to the Google Groups
> "drones-discuss" group.
> To unsubscribe from this group and stop receiving emails from it, send an
Peter Plischka
Thank you Paul and Ben,
The difference of 5 degrees to 10 degrees in practice, be very difficult to detect.
I'm about to read the Document from Paul.
regards Peter

Andrew Tridgell
> With the extra satellites available with this receiver, it may be worth
> experimenting with a higher mask angle.
We should add a GPS_ELEV_MASK parameter I think, with some reasonable
default (5 or 10 degrees maybe?). That would allow users to tune for
terrain too.
Cheers, Tridge
Julien Dubois
and what about a real time autotune? the controller adjusts this mask value to get a decent accuracy with the highest mask value possible.
In worst case, the mask is limited to 5 (no change from current perf)
In other cases, we increase consistency while keeping the same accuracy we currently have.
Julien
Peter Plischka
That's fine, Andrew.
Due to the frequent plugging the GPS units, the DF-13 connectors are on PIXHAWK gotten loose.
regards Peter
Łukasz Wasik
W dniu wtorek, 3 czerwca 2014 21:19:49 UTC+2 użytkownik Peter Plischka napisał:
Peter Plischka
It will be hard to see a difference.
You can even try out different settings and show us the difference.
regards Peter
Ben Nizette
> Someone said that Airborn mode is better for fast planes. Pedestrian mode is
> better for copters. Is it true?
Airbourne 1 or 2G, Rover was Automotive. Tridge and I (mainly
Tridge!) did some testing 6 months ago and found that all three
probably should be using Airbourne 4G. 4G is the closest we've got to
telling the GPS not to filter at all. This is important for us
because 1) we have our own filters (INAV, recently EKF) that have more
information and can filter much more effectively than the GPS and 2)
because filtering inside the GPS introduces latency that degrades the
performance of our filters.
Things like "better accuracy for position hold" might be true if we
didn't have INAV (or if your frame vibrates heaps, in which case fix
that!), but in the general case it's best to just let INAV do its
thing.
Ben.
Peter Plischka
Ah, thank you Ben,
I had not considered that.
But we can still experiment with the Min SV Elevation Mask.
I would be glad if Andrew makes it a parameter.
That would help a lot.
regards Peter
Ben Nizette
allow parameters attached to GPS, it should be an easy-enough coding
task now.
Ben.
>>
>>
>> regards Peter
Paul Riseborough

Craig Elder
--
Paul Riseborough
Julien Dubois
--
You received this message because you are subscribed to a topic in the Google Groups "drones-discuss" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/drones-discuss/r7gREVd3Ilw/unsubscribe.
To unsubscribe from this group and all its topics, send an email to drones-discus...@googlegroups.com.
Paul Riseborough
Paul Riseborough
Julien Dubois
From this picture I see this is the mini GPS with small antenna. So I guess we could expect even better results with bigger antenna. 35*35 for example.

gervais
Am Samstag, 7. Juni 2014 13:12:38 UTC+2 schrieb Julien Dubois:
From this picture I see this is the mini GPS with small antenna. So I guess we could expect even better results with bigger antenna. 35*35 for example.
The evaluation board with the bigger (but thinner ?) patch comes with a passive antenna, the smaller one with a different chip and active antenna. I would not bet, that the bigger one is better.
For such a small patch Peters (and others) results are amazing..even without an additional GP.
If you find a big active dual band antenna, please let us know. So far I did not.
Julien Dubois
http://www.csgshop.com/product.php?id_product=138
The bigger the surface or volume of the antenna, the best it's performances.
So, I meants for example to replace this antenna by something like that
http://www.goodluckbuy.com/32db-high-gain-cirocomm-gps-active-built-in-ceramic-patch-antenna-38386mm.html
Same RHCP active, but more surface, more volume, more gain (here, 32dB)
http://www.goodluckbuy.com/32db-high-gain-cirocomm-gps-active-built-in-ceramic-patch-antenna-38386mm.html
Julien

Loic B

jdennings
I have a couple of Neo 7m modules with separate patch antennas with about an inch of wire, that I plan to dual use (second logged for now) on arducopter (Something like these.) Are there any pros or cons, electrical and signal quality wise, to soldering the antennas at the edge of the pads instead of reflow soldering them on the boards with solder fully underneath? (The boards have four large pads at each corner). Hot glue/epoxy?
Also, is there any point in jacking up the update rate now with 10Hz on the 7M and up to 18Hz on the 8M? I know the accels and gyros can take care of it all in betweek refresh rates at 5Hz, but especially at high speeds (> 40ms, say), wouldn’t more frequent updates improve accuracy and be less error-prone?
gervais
Active Dual band antennas mentioned in the u-blox hardware integration manual are heavy car types coming with an enclosure...
Craig Elder
John there is no point in going faster than 5hz unless you rewrite some of the control loops.
With the current setup you will gain more performance by increasing the precision of the GPS than you will by increasing the update rate.
I have a couple of Neo 7m modules with separate patch antennas with about an inch of wire, that I plan to dual use (second logged for now) on arducopter (Something like these.) Are there any pros or cons, electrical and signal quality wise, to soldering the antennas at the edge of the pads instead of reflow soldering them on the boards with solder fully underneath? (The boards have four large pads at each corner). Hot glue/epoxy?
Also, is there any point in jacking up the update rate now with 10Hz on the 7M and up to 18Hz on the 8M? I know the accels and gyros can take care of it all in betweek refresh rates at 5Hz, but especially at high speeds (> 40ms, say), wouldn’t more frequent updates improve accuracy and be less error-prone?
--
You received this message because you are subscribed to the Google Groups "drones-discuss" group.
To unsubscribe from this group and stop receiving emails from it, send an email to drones-discus...@googlegroups.com.
Ben Nizette
changing the rate changes the latency (e.g. whether the unit
internally filters several successive samples if the output is not
requested at the solution rate) and if so, perform some hack along the
lines of dropping every second sample?
Ben.
Julien Dubois
the stock antenna installed with the M8 module is centered 1575MHz with only 10MHz bandwidth... so it doesn't no fit the Glonass Range neither: 1592.9525 MHz to 1610.485 MHz. It will be just a bit closer.
So, I was hoping extra gain would compensate it and give even better results.
But, anayways, now I have received the M8, I'll order the antenna I suggested and do some comparisons.
About dual-band, you're right, that would be ideal!
Julien
gervais
I did not receive mine yet. But I expected it to come with the CIROCOMM 605C which obviously looks different than the 1575MHz antenna of your first link.
Did you receive the antenna specs from CSG ?
CIROCOMM pages don´t reveal specs of the 605C type.
Btw. I did experiments with a Navilock board which did not work well with a GPS patch for GLONASS. At that time I thought that this was due to GLONASS itself. As far as I remember, Peter did as well. And according to his amazing results with the MAX-M8Q board, I just can´t believe that its equipped with a GPS single band antenna..
But if CSG told you,I have to. :-(

Dom

Peter Plischka
Hi there,
here is a quick comparison between a ublox M8N and a M8Q.
Both are mounted on a Hexa with PIXHAWK in the same amount.
GPS1 is M8N GPS2 is M8Q.
The N usually had two Sats more than Q.
.
I'm just flown between the houses.
regards Peter
Craig Elder
--
Craig Elder
gervais
looks great indeed. Did you use this antenna ? http://navspark.mybigcommerce.com/internal-gps-glonass-active-antenna/
Peter Plischka
Thanks for the note, Craig. I'll be looking at the documentation.
I am a member of ArduCopter Tester Group and always fly the current master commit.
The M8N is certainly a great GPS.
Maybe Andrew can even view the log file.
regards Peter
Peter Plischka
Craig.
I have today emailed with the Hannes Delago from the ETH.
He is working on a driver rework for the PX4 Firmware . The M8 has a few other mesages.
His pull request can be found here:
https://github.com/PX4/Firmware/pull/1027
Maybe we could take over the.
At the moment ofsQ and magQ is not written in the log file.
regards Peter
gervais
Obviously better.
Did you user the compass version of the M8N or the one without ?
BR
Peter Plischka
Kai, I have the version with the built-in Compass.
But I've been using the Honeywell HMC5983 on all Coptern with better results than the Honeywell HMC5883L.The M8N is has still a Honeywell HMC5883L installed.
regards Peter
Craig Elder
--
Peter Plischka
Sorry, I have not seen it.
You're right, Craig .
regards Peter
Randy Mackay
Dom,
The 2nd GPS should appear in the GPS2 dataflash message. It may not be available in AC3.1.5 though, you might need to move to AC3.2-rc2 which is available through the mission planner’s Beta Firmware’s link.
The Navspark seems too good to be true (cheap, light and more accurate according to the hdop/num satellites). My understanding is that the hdop is an estimate from the GPS itself so it may not be completely truthful or we at least may be comparing apples with oranges when we compare the ublox hdop with the navspark hdop. Anyway, no need for me to be cynical too quickly, the proof will come when you’re able to compare the output more directly.
-Randy
--

Xerr Avon
I just ordered 2 of the M8 GPS's I would like to use as a second GPS on my pixhawk but I am not finding any info on how to do it. Please if possible would someone point me to it if there is any? I am guessing it goes in the serial port above the one labeled GPS on the pixhawk, is this correct?
I thought I remembered seeing some parameters for a second GPS but I just looked and do not see them now (running 3.2-RC2) Will the parameters show up when a second GPS is connected? do I need a different FW version?
thanks for any help,
John
On Saturday, May 17, 2014 10:03:37 AM UTC-5, Peter Plischka wrote:
Hi there,
attached a log file from a flight with a ublox M8 GPS and a 3DR ublox 6 GPS.
Between the houses a maximum of 13 Sats were achieved with the M8.
The ublox 6 had reached a maximum of 8 Sats.
The copter was very good in the air in hybrid mode.
The values of ofsl ofsQ magl magQ look completely different than a ublox 6
@ Paul
It was the version e924da4fec871ec5f0df4c786d9ef2d124f8e0b6
regards Peter
Randy Mackay
Xerr,
We currently only report the output from the 2nd GPS in the dataflash logs, we don’t use it for navigation.
We don’t have any documentation on how to plug in the 2nd GPS but I think you’re right that it’s the Serial 4/5 port that should be used. Also you should be able to use the standard DF13 6pin connector. When it comes to figuring out which pins go where on the non-3dr M8 (‘cuz there isn’t a 3dr M8 yet), I have no idea, sorry!
-Randy
From: drones-...@googlegroups.com [mailto:drones-...@googlegroups.com] On Behalf Of Xerr Avon
Sent: June 13, 2014 9:33 AM
To: drones-...@googlegroups.com
--

Jaime Machuca
Hi, does anyone have a description of how the camera xml for Droidplanner works? I would like to add the GoPro to the list in Droidplanner.
Brandon Basso
Hi Jamie,
The camera XML has sensor width and height in mm and number of horizontal and vertical pixels. We'll add a few of the GoPro models in the next release.
Brandon
Xerr Avon
thanks for the info, I ordered the M8R, I think it is "R" the one with the compass so I will give it a try. from the pic's the pinout is labeled on the board.
thanks again,
John
Peter Plischka
> We currently only report the output from the 2nd GPS in the dataflash logs, we do not use it for navigation.
Randy,
I think that's not true. As far as I know we switch to the second GPS when it has 2 Sats more than the first.
regards Peter
Randy Mackay
Peter,
Yes, you’re absolutely right, sorry about that.
-Randy
From: drones-...@googlegroups.com [mailto:drones-...@googlegroups.com] On Behalf Of Peter Plischka
Sent: June 14, 2014 2:20 AM
To: drones-...@googlegroups.com
Subject: [drones-discuss] Re: First flight test with a ublox M8 GPS
> We currently only report the output from the 2nd GPS in the dataflash logs, we do not use it for navigation.
--
Tom Coyle
Peter Plischka
Here is a comparison of two M8 modules.
GPS1 is a M8N and GPS2 the M8Q.
The flight shows an autotune and fast flying.
The large M8N shows the best results.
By the way: The module with the helix antenna is not recommended.
Where the M8N gets 19 Sats, the helix modulegets gets only 5 Sats. Very poor.
regards Peter
gervais
I have to order the M8N as well ;-), although the HDOP difference is not that big as I expected .
I was wondering, that the HDOP values of M8N are more inconsistent than than the slightly worser ones of the M8Q.
It might not matter (on that level), but did you notice this repeatedly ?
Did you choose the M8N without compass ?
BR,Kai
Peter Plischka
Hi Kai,
it was not a good day. We had high solar eruptions.
This was my second flight with the M8N. I'll be watching it.
regards Peter
Ben Nizette
I must admit that I haven't kept up with this thread but I have had a
quick look back through: Do you have a link to the particular M8N
module you're using? I presume that the M8Q module is the MAX-M8Q
module from CSGShop you linked to a while back?
I also just want to echo something Paul said ~60 messages ago, that
HDOP isn't necessarily a great thing to be comparing here. Strictly
speaking, HDOP is only a function of satellite position, it doesn't
have any measure of the absolute accuracy in it. If you've got two
modules looking at the same constellations at the same time then the
HDOP basically gives you no more information on relative performance
than the number of satellites does. Besides, once your HDOP is less
than two, and certainly less than 1.5, you've more or less won anyway
:)
It /might/ be better to actually look at the accuracy estimate fields
from the POS_{ECEF,LLH} messages as they should be the covariance
estimates from the internal filter, which is more or less what you
want. I haven't done or seen any characterisations to test their
reliability though, so YMMV!
Cheers,
Ben.
Peter Plischka
Hi Ben,
thanks for the info.
Both are Modeule of CSGShop.
http://www.csgshop.com/product.php?id_product=174
The POS_ {ECEF, LLH} message can I see only on the ground.
In the logfile it would be better.
The M8, however, is in any case an improvement.
On the same Place the ublox 6 Module shows 7 Sats with HDOP 3.0 m.
The M8 shows 17 Sats with HDOP of 1.2 m.
regards Peter
Ben Nizette
because I'm in China at the moment and the GPS geometry in this part
of the world is aweful. I'm going to order some M8's shortly for
exactly that reason.
OK cool, so you're running NEO-M8N and MAX-M8Q. I've actually have
interesting times comparing NEO and MAX before, quite apart from
whether they're flash or ROM memories. There seems to be some amount
of tradeoff in the RF front end integrity while packing in to the MAX
form factor (unsurprisingly!).
Anyway, thanks for the info, I'll order some soon!
Ben.
Tom Coyle
On Saturday, May 17, 2014 11:03:37 AM UTC-4, Peter Plischka wrote:
Alex

Roberto Navoni
https://plus.google.com/108932032205552825856/posts/UHLuQm7nhaY
best
Roberto

Robert Lefebvre
Roberto Navoni
sure have new magnetometer HMC5983 .. and support i2c and spi bus ...
so if you have a long cable ora have a lot of interference is not a
problem :)
best
Robeto
Tom Coyle
|
PRT (ports) |
UART 1 |
|
|
Protocol out |
UBX |
|
|
Baudrate |
38400 |
|
|
RATE (Rates) |
Measurement Period |
200 ms |
|
Measurement Frequency |
5 Hz |
|
|
NAV5 (Navigation 5) |
Dynamic Model |
Airborn 4G |
|
Fix Mode |
3 - Auto 2D/3D |
|
|
Min SV Elevation |
10 Grad |
|
|
DGPS Timeout |
120 sec |
|
|
SBAS |
Subsystem |
Enabled |
|
PRN Codes |
EGNOS (EUROPE) |
|
|
120, 124, 126, 131 |
Tom Coyle
Tom Coyle

Jonathan Challinger
Tom Coyle
Roberto Navoni
Xerr Avon
I just received the M8N with compass onboard. I am currently trying it on an APM25. I got the GPS working fine but the compass I am not having any luck with.
the header on the M8N is like the header on the 3dr GPS with compass (but no df13 connectors) it is 5V, GND, SCL, SDA, RX, TX I have the 5V, GND, RX and TX going to the GPS port the I2C lines for compass I am just running SCL and SDA to the I2C connector.
I know the 3DR GPS with compass, somehow handles the 3.3v for the I2C and works, so I thought this would work as well, but it does not seem to.
does anyone know how to get this running on an APM25? I havent tried on my pixhawk yet.
thanks,
John
gervais
PIXHAWK: CSG compass works with the PIXHAWK with SDA SCL only. (Since the 3.3V for the HMC are coming from an onboard LDO, it doesn´t need a sep. source)
APM: Since my M8 is already encapsulated, I can´t check the CSG board, but its sounds like there are pullups mounted on the output lines. Usually the APM level translator doesn´t get along with pullups (e.g.4.7k resistors) going from the output lines to 5V. If they are present, just remove them and it will work.
Xerr Avon
On the Pixhawk with the compass on the M8N the compass offsets are pretty high, higher than the 3dr gps compass in the same location and the magnetic interference is quite a bit lower. It is like it is not seeing the interference.
In the same mounting location with a 4S the 3DR GPS was reding about 10% interference, the M8N was showing 0% or close to it.
**********************************************************
M8 compass
COMPASS_MOT_X,-0.02417866
COMPASS_MOT_Y,-0.06758815
COMPASS_MOT_Z,-0.03742902
COMPASS_OFS_X,-266.5963
COMPASS_OFS_Y,6.11928
COMPASS_OFS_Z,-257.6744
*********************************************
3DR GPS with compass
COMPASS_MOT_X,0.05558018
COMPASS_MOT_Y,-0.1073401
COMPASS_MOT_Z,-0.03237339
COMPASS_OFS_X,-33.80017
COMPASS_OFS_Y,33.18163
COMPASS_OFS_Z,58.92382
As far as the GPS, I am seeing much better results with the M8N, it loiters dead still, I had a little walking around with the 3dr GPS, I think it has a lot to do with the location. But still with the 3DR GPS I would usually get 11 sats (most I ever saw was 14, and just briefly) and was lucky to see HDOP of 1.5. with the M8N I am getting 17 or 18 sats right away and HDOP of 1.0 to 1.2.
John
gervais
http://s7.directupload.net/images/140706/hvb9nw3h.jpg

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Brian DeBusk
It would be a good starter exercise for me to learn how to integrate new hardware like this.
Tom Coyle
On Sunday, July 6, 2014 10:52:21 AM UTC-4, Brian DeBusk wrote:
Brian DeBusk
What do you think of this idea:
1) I order one of these: http://www.csgshop.com/product.php?id_product=173
Question: Do I need to order and antenna for it as well, or is it integrated into the module? Am I ordering the right module?
2) Then I use the U-center software to configure the M8 to act like the 3DR GPS module. Basically I'm not changing any of the Pixhawk code, but I am making the M8 act like the existing Pixhawk compass.
I have FTDI cables here at the house, so that part shouldn't be hard at all.
3) Then I cut a Pixhawk four-pin cable and connect it to the I2C port of the M8. I'm guessing I'll need to configure the M8 to output the compass data on the I2C port.
4) Then I cut a Pixhawk six-pin serial cable and connect it to the M8's serial port. I'm guessing the GPS location data is passed to the Pixhawk via the serial port.
Am I on the right track?
Thanks in advance,
Brian