Crashed in STABILIZE due to (very) bad GPS conditions with EKF enabled

Holger Steinhaus

Łukasz Wasik

Randy Mackay
Holger,
I’ll take those logs if you’ve got ‘em. Alternatively you can post the logs to the AC3.2 thread.
http://diydrones.com/forum/topics/arducopter-3-2-beta-testing
-Randy
--
You received this message because you are subscribed to the Google Groups "drones-discuss" group.
To unsubscribe from this group and stop receiving emails from it, send an email to drones-discus...@googlegroups.com.
For more options, visit https://groups.google.com/d/optout.

Paul Riseborough
Are you able to send me your log? The EKF has a gate to reject large velocity glitches, but if they persist then it can be a problem.
I'm not aware of a way to stop it using GPS other than unplugging it. This is something that will be addressed later as part of the optical flow update for EKF.
Regards,
Paul
Paul Riseborough
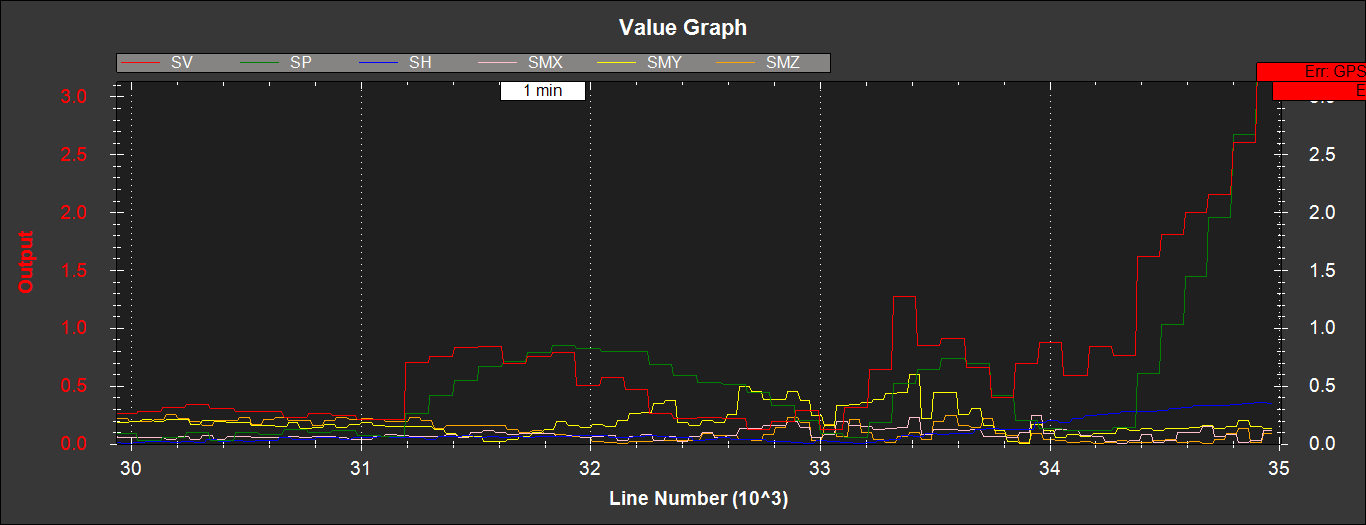
Although the EKF did eventually reject the bad GPS velocities, it was close to doing so earlier. The attached figure shows the normalised innovations starting just prior to the GPS glitch. You can see that the normalised velocity innovation SV almost makes it to the rejection threshold of 1 at the start of the glitch.
Setting EKF_VEL_GATE to a smaller value (eg 3 instead of the default of 6) would make it more resistant to these types of GPS errors, at the expense of being more likely to false trigger the EKF velocity and compass variance check, so if you do so, then it would be advisable to relax the variance check by setting EKF_CHECK_THRESH to 1.6, or if you are confident in your compass, disabling altogether by setting EKF_CHECK_THRESH to 0.
The GPS only had 4 sats for most of the flight so regardless of the HDOP it was risky. Probably the safest strategy in similar circumstances if you needed to fly at low speeds in stabilise would be to disconnect the GPS.
Regards,
Paul
On Sunday, 21 September 2014 21:40:11 UTC+10, Holger Steinhaus wrote:
Holger Steinhaus
Although the EKF did eventually reject the bad GPS velocities, it was close to doing so earlier. The attached figure shows the normalised innovations starting just prior to the GPS glitch. You can see that the normalised velocity innovation SV almost makes it to the rejection threshold of 1 at the start of the glitch.
The GPS only had 4 sats for most of the flight so regardless of the HDOP it was risky.
Probably the safest strategy in similar circumstances if you needed to fly at low speeds in stabilise would be to disconnect the GPS.

Robert Lefebvre

Jesus Alvarez

Gary McCray
Robert Lefebvre
Gary McCray
Gary McCray
On Sunday, September 21, 2014 11:42:39 AM UTC-7, David Pawlak wrote:
@Gary,There seem to be two situations here:1) Glitch detection problem AND less likely (in this case) but possible
2) RTL due to "Fence Breach" (Isn't this still possible?... Fence enabled, GPS prearm disabled)We have seen cases where in the early stages, takeoff with instable GPS causes GPS glitches. Various levels of effort have gone into resolving these situations, but the fact that GPS glitches and Fence breaches can happen in Stabilize mode means that GPS IS USED IN STABLIZE.Other threads here have also made it clear that GPS IS used in Stabilize mode.Fortunately the damage in this case is minimal, but it is good that it has happened as a reminder. THAT GPS IS USED IN STABILIZE MODE:
Jesus Alvarez

David Pawlak
Gary McCray
Jesus Alvarez
Paul Riseborough
The EKF tuning is a compromise to handle a wide range of flying from aggressive aerobatics to precision hovering and tightening up the velocity innovation gate would have prevented the tilt error in this instance. I can see there would be benefit to a different tune for the EKF when operating in a mode where position and velocity data is not required. Such a mode could afford to be be a lot more discriminating of GPS errors and be tuned to maximise the reliability of the angle estimates. Another possibility in such a mode is to use the accel values to detect when the vehicle is manoeuvring and to only use the GPS when sustained manoeuvres are detected.
There would also be benefit in scaling filter parameters based on the number of satellites. For example when operating with 4 satellites, severe glitches are much more likely (almost a certainty) compared to when operating with 6 or more. This has been on the EKF to-do list for some time, but I have had difficulty in gathering the required data to do it scientifically, rather than just implement something ad-hoc.
.
Robert Lefebvre
Gary McCray
Gary McCray
Not saying GPS isn't a truly great thing, just that it's got, for us, some severe limitations as well.
Gary McCray

jdennings
Confused ... and scared. I fly a lot indoors or in GPS deprived or poor environments, in stabilize or alt-hold, and always thought that those modes did not involve GPS. ("Directly". I do know about fence, failsafe rtl, and other conditions that would trigger a situation where gps would be needed. I always disable these when I know I have low or zero GPS signal). In addition, stabilize has always been my "goto" and simplest mode when I know conditions are not ideal, I perceive something is wrong, or fly "abnormally", testing. etc ...
Paul Riseborough
Copters (like the cheap indoor model Gary mentions) can get away without manoeuvre compensation whereas planes cannot as they perform often perform sustained circular loiters in the one direction, where eventually the AHRS solution will think it is flying level as the acceleration is always sensed downwards. The DCM (and EKF) algorithms are a general purpose solution that have been designed to work for both planes, copters and more recently rovers.
BTW it is possible for planes to have a attitude reference without GPS if airspeed measurements or assumptions about sideslip and wind are made.
For those wanting to fly without GPS, the short term solution is simple - disconnect it.

govsux
jdennings
Randy Mackay
I think it’s possible that it’s an EKF vs DCM issue so we should do some more testing of EKF vs DCM’s response to GPS glitches.
Like many have said on this thread, both EKF and DCM use the GPS indirectly for the centrifugal force correction in all flight modes but it’s possible the accelerometers are weighted differently in the two solutions and they are certainly weighted differently between plane and copter. In particular Copter/DCM reduces the weighting of the accelerometers by 8x after arming. This is why with official arducopter you see the HUD move a bit while disarmed but it calms down once the vehicle is armed.
So, let’s be cool, before we have a crisis of confidence, let’s remember that:
· This was flying latest with EKF enabled (not DCM which is the default)
· DCM has been used reliably for years. The centrifugal correction has been there since AC2.4 or earlier and we have never diagnosed a crash as being caused by a GPS glitch affecting DCM’s attitude estimate in Stabilize mode.
-Randy
From: drones-...@googlegroups.com [mailto:drones-...@googlegroups.com] On Behalf Of Paul Riseborough
Sent: 22-Sep-14 11:05 AM
To: drones-...@googlegroups.com
Paul Riseborough

Josh Welsh
There are two little “tabs” on the DF13 connectors that you can easily and carefully (VERY carefully!!) sheer off to make unplugging and plugging easier. I use an exacto knife on all my DF13’s to do that.
Not trying to go off topic, just providing an alternative in line with Paul’s suggestion that may be easier. I don’t recommend this on Rob’s gas heli, though J
--
Gary McCray
On Sunday, September 21, 2014 4:40:11 AM UTC-7, Holger Steinhaus wrote:
Today I made a short test flight - much shorter than originally intended. GPS conditions were pretty bad (several thick layers of clouds), horizon obstructed up to 45° of azimuth, HDOP has improved below 3 when I decided to takeoff.A few seconds after takeoff, hovering in about 1m in STABILIZE, there were sudden uncommanded roll impulses of the copter to the right, I countered them and tried to land asap. Due to tue large roll impulses, I landed on one skid, when the next heavy roll impulse happened, turning the onto its back. As the logs reveal, during arming the HDOP went to about 6, coming back to 2.6 during flight, and jumping back to 6 shortly before the crash. During the seconds before the crash, there were amazing GPS speeds (around 10m/s), while the copter was definitely nearly static. Binlog is available on PN request.Is there any way to safely and completely disable any GPS support for this kind of test flight? Is setting EKF_USE to 0 enough?Holger
Paul Riseborough
I would rather you didn't use the 'political' word as it has negative connotations and implies motives that we are not in a position to judge. The reason for me not providing such a mode with EKF stemmed from the fact that when I started it's development, I had zero experience with copter and did all my early developmental testing using the plane code-base, and planes just don't need/can't use such a feature. Since then 3DR have been kind enough to provide a copter for me to do testing on which has provided better a understanding of the unique requirements that the copter community has.
I am happy to provide a patch to the EKF to enable such a mode, user selectable, if it will be useful to enough people, and it has the blessing of Randy and Tridge. I am doing this in my spare time as a volunteer and avoid spending time on features that do not stand a good chance of making it into master.
Regards,
Paul
Randy Mackay
I’ve done a little testing today with DCM (and EKF to a lesser extent) to better judge what impact a large change in velocity from the GPS would have on the attitude. I’ve created a little video showing the impact which seems quite small (about 4deg for a 20m/s change). https://www.youtube.com/watch?v=I2aPw1jNZDs&feature=youtu.be.
I’ve also tested turning off the correction by setting the AHRS_USE_GPS parameter (or AHRS_GPS_GAIN parameter) to zero and indeed it seems to remove the correction completely.
-Randy
--
Paul Riseborough
Paul Riseborough
I will put together a patch so the AHRS_GPS_MINSATS parameter is used the same way with EKF selected as it is with DCM/INAV.
Thank you to Holger for the valuable test data.
Robert Lefebvre
Robert Lefebvre
Paul Riseborough
A workmate with a 'self righting' non-GPS flybarless setup on his heli has similar roll/pitch error issues if he does sustained high-g funnels and then hits the bailout switch - it does however get back to approximately right way up which buys him a few more seconds to take control.
Anyway, there's plenty of scope for further EKF tweaking as we get more feedback from users.
Robert Lefebvre
Paul Riseborough
We need to get full rate IMU data logging and the EKF replay working. Once that's done then an extreme acro flight can be used to tune the algorithms off-line. The other reason I'm interested in extending the performance envelope is a long term aim to have a small UAV fly a full length aerobatics sequence on full auto.
Regards,
Paul

john...@gmail.com
We know that GPS is one of our least trustworthy sensors. Meaning we should make it a point to use GPS as little as possible. This way you get the traditional fallback scenario where each mode use less sensors, making the system more and more robust (provided the pilot is experienced enough to operate without GPS or in worst case with gyros only).
I always have a dirt cheap quad with a KK2 controller ready for some spontaneous "fly it like you stole it" fun. Never had a problem with stabilize other then some lean for a couple of second after brutal flying. And there is no GPS in that system.
Randy Mackay
Yes, it has been worthwhile. Thanks a lot Paul. My apologies to Holger that I didn’t more quickly realise the importance of his report and for being a bit defensive.
To be clear Holger’s uncommanded roll would not have happened had his vehicle been using DCM.
-Randy
From: drones-...@googlegroups.com [mailto:drones-...@googlegroups.com] On Behalf Of Paul Riseborough
Sent: 22-Sep-14 7:43 PM
To: drones-...@googlegroups.com
Subject: [Bulk] [drones-discuss] Re: Crashed in STABILIZE due to (very) bad GPS conditions with EKF enabled
Well, this has been a worthwhile exercise. Whilst discussing the behaviour with Randy, I realised that there is a AHRS_GPS_MINSATS parameter that the EKF is currently not using. This would have prevented the EKF from using the bad GPS data in Holgers case as it is set by default to 6, and he had 4 and sometimes 5 satellites.
I will put together a patch so the AHRS_GPS_MINSATS parameter is used the same way with EKF selected as it is with DCM/INAV.
Thank you to Holger for the valuable test data.
--
David Pawlak
Robert Lefebvre
Robert Lefebvre

Emile Castelnuovo
John, I'm not the highest mind in here to reply, but I'll share my two cents.
It is not fundamentally wrong, I'ts fundamentally correct.
If you detach your GPS from APM, it will still fly great, but it will miss something that we have and that is a must for certain platforms (eg. plane)
While in high G maneuvers, the accels will get confused by the centripetal acceleration and report an incorrect inclination.
While this (please somebody correct me if I'm wrong) is less evident in copters as they have a totally different way of "moving" it is greatly seen in planes.
Just to give you an example, try to place your KK2 in a car on your instrumental panel in an horizontal position, then drive and put yourself in a roundabout and start spinning around. Take a look at the artificial horizon (if any) and tell me what you see.
You will probably notice the artificial horizon display an incorrect inclination (even opposite of the one the car has due to suspensions).
Then try to make big brakes and linear accelerations, this also will result in a pitch in the opposite direction.
I agree though that GPS corrections should be done in a higly reliable situation, when we know GPS is not going cucu, but this does not mean that it is wrong.
So IMHO GPS correction is a feature not a bug.
Comparing KK2 and APM should probably be done on a plane during an auto mission...
Cheers,
Emile
We know that GPS is one of our least trustworthy sensors. Meaning we should make it a point to use GPS as little as possible. This way you get the traditional fallback scenario where each mode use less sensors, making the system more and more robust (provided the pilot is experienced enough to operate without GPS or in worst case with gyros only).
I always have a dirt cheap quad with a KK2 controller ready for some spontaneous "fly it like you stole it" fun. Never had a problem with stabilize other then some lean for a couple of second after brutal flying. And there is no GPS in that system.

Philip Rowse
Philip

Leonard Hall

Luis Vale Gonçalves
john...@gmail.com
It should then be noted this relies on how robustly we can detect any GPS problem. In the case of STABILIZE it would probably be better to wrongly reject some good GPS data now and then, then risking bad data getting trough.
Robert Lefebvre
--
David Pawlak
Emile Castelnuovo
I too had a crash or better described as a fly away. I am fairly certain either a complete loss of gps was involved or bad gps data was involved. It started acting odd like it was toilet bowling whist hovering with the wind. I tried RTL, loiter, and poshold [ 3.2 beta ] but it continued to simply drift away. As a last measure I tried stabilize but it was dark and it was hopelessly far away and down wind. I had many problem free flights with 3.2 leading up to this but had just added the Ublox M8.Question.... does the gps itself use the sat data to report to the pixhawk position and velocity data or does the pixhawk take all those raw numbers and calculate it itself? The reason I ask is it has occurred to me that a higher sat count might require more processing ability?? yes?? No ?? I have no idea how that works. But for right now I am suspect of the M8. Maybe many including me have been star struck by the impressive sat count and yet remain unaware of other issues with it?? Just a thought.

Matthias Badaire
Emile
What configuration the m8 needs ? I thought that the pixhawk was configuring it properly.
I had massive problem with it and I am trying to find the interference source as well. All modes were unstable and I have ekf on.
3dr GPS with the exact same setup was rock solid.
Matthias
Gary McCray
Robert Lefebvre

jolyboy
No/bad GPS signal will be properly and automatically excluded from the attitude solution now with the MINSATS EKF patch Paul and Randy have discussed. No need for GPS free stab mode, but if you want you can unplug/switch yours. If I were a betting man I'd say the patch will be in 3.2 very soon.
Other systems without GPS infusion can develop 40° of error if you can fly hard. Its only useful to get the aircraft roughly upright so you can punch it out. This is not better than what we have, plus we have added GPS infusion whenever its available that makes it wayy better.
What we do need is a pure BF acro mode.
Discussions like this almost always prove very fruitful :) A few people report an issue and bam, potentially hundreds of future crashes have now been avoided. Nice work guys.
Robert Lefebvre
jdennings
On Sunday, September 21, 2014 8:50:36 PM UTC-6, Paul Riseborough wrote:
You could route the power (red) wire to the GPS through a switch or in-line connector.
jolyboy
MSH Brain was terrible except for an emergency rough level. It was continuously about 15° off even with my weak slow flying skills. Most users who do proper 3d don't bother with it because its so far off level that it makes them MORE likely to crash. I've read many reports of it actually inverting the heli which is obviously bad in a bailout situation.
Flymentor was OK, but it only stayed within a good range because it wouldn't let you get past 45° like arducopter stab. If you hold the stick forward and cruise around it would drift in the direction you were tilted. Not a big deal though because if you got bad drift you could correct it by holding the heli level for a few seconds LOL. This is how I imagine arducopter would behave without GPS.
WlToys is what's used on my sub micro heli and its pretty effective but still drifts. About half as quickly as Flymentor. Again not a big deal.
FYI the only reliable self levelling system without GPS is the CoPilot II system that uses IR horizon detection, which only works in outdoor open areas without trees or buildings. Useless to us because that's the environment where GPS works anyway.
PS the only laser rings i actually see IRL are the navy ones which are the size of a small fridge, good luck with that LOL
Gary McCray
Robert Lefebvre
Paul Riseborough
Flying a quad 'like you stole it' is not the same as prolonged high g funnels in a trad heli, or a plane doing a sustained high bank loiter. Given the different user preferences, flight vehicle types and flying styles, the decision to use GPS in stabilise should be set by a parameter. We can then have the argument about it's appropriate default setting. Our AHRS library is currently capable of operating without GPS, however there is also low hanging fruit in the area of tuning the DCM algorithm to adjust the weighting on the accelerometer corrections during periods of higher G which would reduce the rate at which it develops the 'leans'.
.
Your points about relying on GPS as little as possible and having progressive fallback are good ones. However the reason Holger ran into difficulties, was that EKF was not using the AHRS_GPS_MINSATS parameter. If he had been using DCM, there would not have been a problem on that flight.
Regards,
Paul
Paul Riseborough
That horizon hobby system may using an attitude estimator that builds in some knowledge of the aircraft dynamics in its algorithm. Such an approach can extend the flight envelope over which an attitude reference can be maintained without GPS. However until I see evidence it can maintain its attitude reference after a slow windup into a constant 2g banked turn held for 5 minutes, I remain skeptical. Flicking the plane through a series of manoeuvres in different directions is not the tough exam question.
The short answer to your question is that as it is currently implemented and tuned, APM plane will give a better attitude estimate with GPS, than without under those high dynamic conditions. Remember, our system was designed from the outset as an autonomous vehicle controller, not a pilot aid for aerobatics. We could no doubt provide a better non-GPS capability given this capability has received minimal development, but it is taking our controller into a different sector of the market where there are already numerous simple plug and play (or plug and pray) solutions.
Regards,
Paul
Paul Riseborough
Yes, the EKF compares the GPS measurement with a measurement predicted by the filter using a statistical confidence check and rejects those measurement that lie outside the check threshold. These thresholds are controlled by the following parameters
http://planner.ardupilot.com/wiki/common-apm-navigation-extended-kalman-filter-overview/#EKF_VEL_GATE
http://planner.ardupilot.com/wiki/common-apm-navigation-extended-kalman-filter-overview/#EKF_POS_GATE
http://planner.ardupilot.com/wiki/common-apm-navigation-extended-kalman-filter-overview/#EKF_GLITCH_ACCEL
http://planner.ardupilot.com/wiki/common-apm-navigation-extended-kalman-filter-overview/#EKF_GLITCH_RAD
Paul Riseborough
https://github.com/priseborough/ardupilot/commit/7b22bed74bb856b32a2a9b94fdeb8dca17275707
https://github.com/priseborough/ardupilot/commit/d9274ed6f62d313208c2b89950d35ac954a16970
I have tested them in SITL (where I can reduce the number of satellites). They have not yet been flight tested.
Regards,
Paul
Randy Mackay
I’ve merged these into AC3.2 branch. I’ll give a test flight tomorrow and then likely push –rc10.
-Randy
From: drones-...@googlegroups.com [mailto:drones-...@googlegroups.com] On Behalf Of Paul Riseborough
Sent: 23-Sep-14 7:18 PM
To: drones-...@googlegroups.com
Subject: [Bulk] [drones-discuss] Re: Crashed in STABILIZE due to (very) bad GPS conditions with EKF enabled
Here are a couple of patches that reduce the likelihood of bad GPS affecting EKF attitudes during flight with less than 6 satellites. The first patch requires at least 6 satellites for EKF to start, the second reduces GPS measurement weighting if it has started and the number of satellites drops below 6.
--

{kind=link}