Ardupilot Flight Controller with onboard OSD

Andy Little
Hi,
Thought you might be interested in this project using ArduPilot to create an STM32F4 based Flight Controller with
onboard OSD. The board is basically an OSD dev board with the spare
stm32 pins broken out:
The software uses FreeRTOS. There are 2 top level tasks, one to draw the OSD and one to run the Ardupilot scheduler.
So
far the only other task is the scheduler timer which I opted to put in a task rather than an interrupt for
now.
Some tests of the drivers:
All software and hardware is licensed under GPL


regards
Andy
Andy Little
Completed and tested basic SPI driver
That means I should have a working set of sensor drivers. I guess at some point soon I should try running the AP_InertialSensor INS_generic example
unless anyone can suggest a better in between step ?
regards
Andy
Andy Little
Carrying on with my barebones STM32F4 based Ardupilot port.
Here is a pic of pretty much everything attached to the board (except Cam and Vtx)
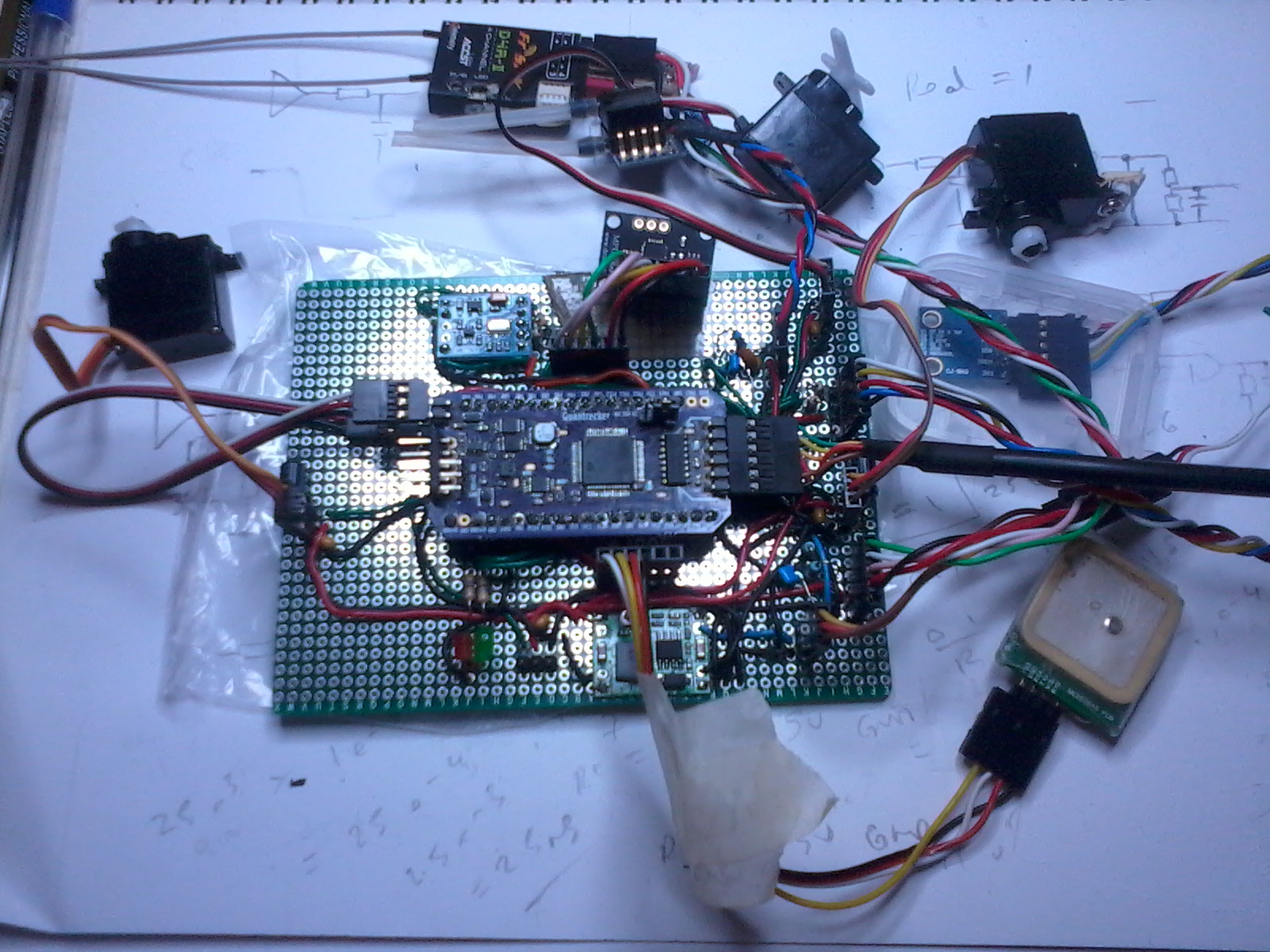
There are 4 servo outputs
The Compass is a HMC5883L. I have used these on all my other APM based planes. Very cheap and seems to work well enough.
The Baro is a MS5611. Its pretty accurate and not too pricey
The Compass and Baro share the single I2C bus. I hope that wont cause a major problem, since neither needs a very high update rate.
The IMU is a MPU6000. This is on the single SPI bus and the clock can be cranked up to 21 MHz which is just in spec.
The Airspeed sensor is an analog sensor. I would consider this essential now and wouldnt fly without it. There are also analog inputs for RSSI Batt votage and Batt currentt. So its all pretty minimal, but that is the essence of this project enough and no more
There are 3 1/2 uarts. (1 tx only). This covers the basic needs of GPS/ telemetry and console.
So far I am working through the examples for the sensors:
AP_Compass_test
BARO_generic
GPS_AUTO_test
The AP_HAL concept certainly seems to be working well. After having done my basic drivers, the code generally seems to "just work" :)
Just fired up INS_generic. This is the biggie, but not sampled the menus yet as its way past my bed time.
So far these single tests seem to be going OK. How well eveyrthing works together ? ... that is the next level I guess :)
regards
Andy
"avoid success at all costs " (Simon Peyton Jones)
Andy Little
regards
Andy

Tom Pittenger
--
You received this message because you are subscribed to the Google Groups "drones-discuss" group.
To unsubscribe from this group and stop receiving emails from it, send an email to drones-discus...@googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
Andy Little
On Friday, September 18, 2015 at 5:42:21 PM UTC+1, Tom Pittenger wrote:
Andy,"Waiting" should be avoided at all costs. I'm not sure how much of the DMA is available in the SMT32 but that is a must-have for smooth operations. There are too many moving parts with critical timing to have *any* waiting going on.-TomP
Hi Tom,
The STM32 has pretty good DMA support . There are in total 16 so called "DMA streams" which can theoretically run in parallel. Its possible to hookup (among others) SPI, I2C, ADC and UARTs to DMA. AFAIK the I2C DMA is a bit problematic so I'm running that in an interrupt . I do plan to use DMA for SPI though once I have things working. For the initial attempt at this though and to get something running I'm basically following the AVR implementation. and for SPI AFAICs that is busy waiting
https://github.com/diydrones/ardupilot/blob/master/libraries/AP_HAL_AVR/SPIDevice_SPI0.cpp#L86
But yes with FreeRTOS I cant really do usec timing as it uses preemptive scheduler with a granularity of 1 millisec. I am unlikely to give up FreeRTOS so I have yet to discover what interesting problems that leaves me with :)
regards
Andy
Tom Pittenger
Andy Little
I hoped this would be less of a problem since the code is now mainly running on multi-tasking operating systems,
but I ended up writing some higher level sensor architecture while reusing much of the existing code which I know works :)
have a single i2c bus and a single SPI bus available.
The HMC5883 compass and the MS5611 baro are on the same i2c bus.
To make life easy I decided to run the i2c task loop at 100 Hz.
I used low pass filters for pressure and temperature right in the I2C task which expect a consistent sample rate, so the task
alternates between reading the baro pressure and temperature, giving a raw update rate for those variables, of 50 Hz.
I used the request single measurement option for the compass to give a smooth 100 Hz raw data rate.
Thei2c task starts a particular i2C transfer on the bus and then yields,
waking up when the transaction is done. At some point I could try to get I2C DMA working but it works
well enough using interrupts. I leave the I2C bus at its lowest speed. I found that high speed doesnt
work well on long cables, which are mandatory for a compass so I figure it has to work at the lowest possible speed
for reliability and if the transaction is done via interrupts, it makes little difference, except to the lag, which
is not so critical for these variables anyway.
The APM task will block if there are no messages, but messages are fed at a high enough rate to keep the queue full, so
if all is working then there should be no blocking. The custom AP_Compass_Backend and AP_Baro_Backend are just stubs, which
receive the FreeRTOS messages.
which is used to start a DMA transfer of the gyro and accel data from the IMU
I opted to run the SPI at 21 MHz which is just in spec for the MPU6000 but can throttle it back if its a problem. (At some point
the AP_InertialSensor settings. (The interrupt is given a low priority so may be pre-empted. ) The
APM task blocks in the AP_InertialSensor::wait_for_sample function. It is woken at the end of the DMA transfer complete interrupt
if it is time to pass it new data ( ie at the required sample rate which can be selected as 50 Hz, 100 Hz, 200 Hz, 400 Hz). By this means the MPU600 is running the main APM loop!
Andy
Andy Little
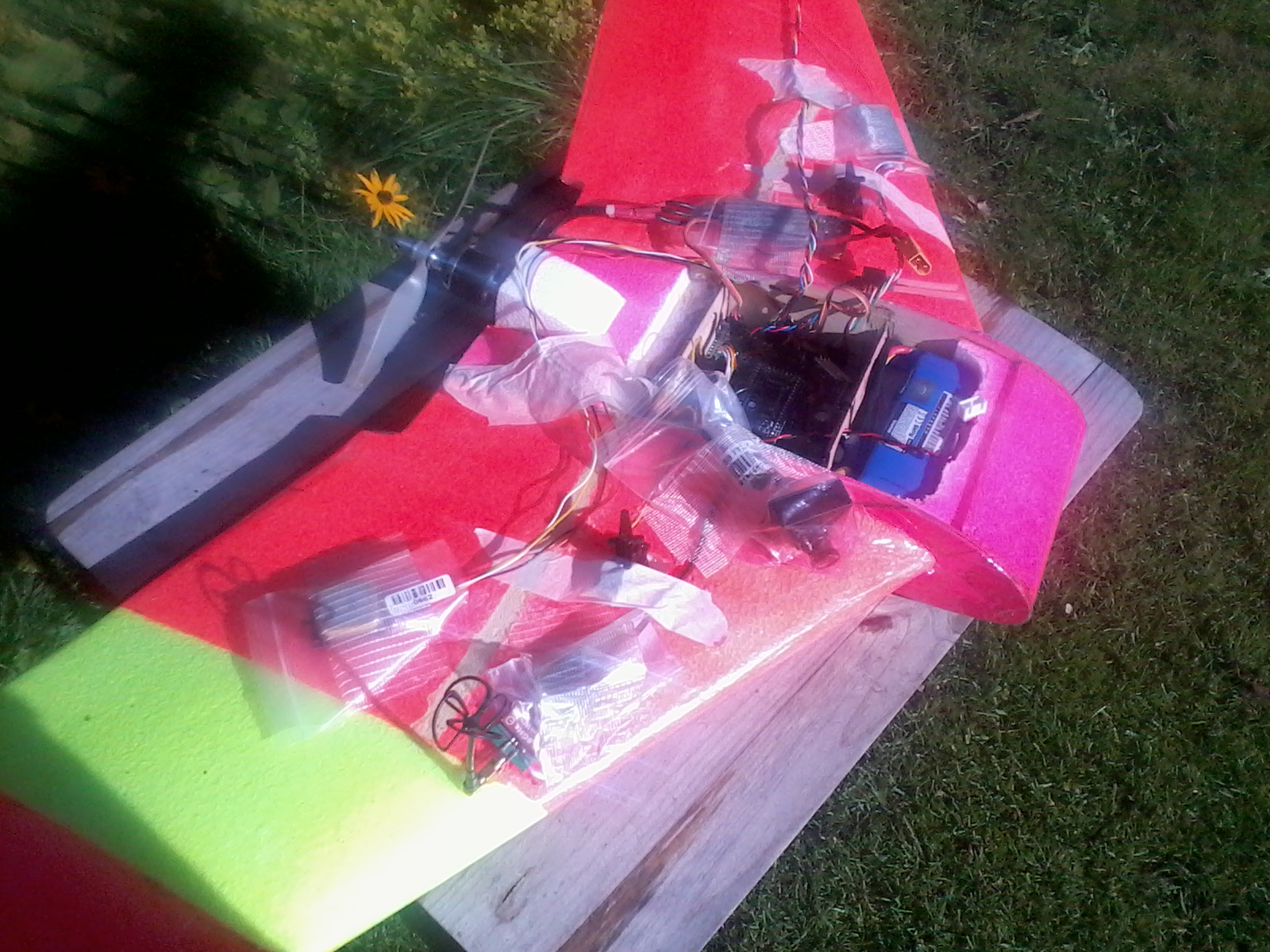
Nearly Ready to flight test ... Will of course tidy up the wiring a little first :)
Andy Little
Andy Little
Anyone interested in this port on here? Somehow feel i'm wasting my time posting anything about it. Doesnt seem to have had much reaction at all?
Andy Little

Randy Mackay
Andy,
A video speaks a thousand words. That is very smooth.
So this is arduplane running on the OSD board under FreeRTOS (i.e. no NuttX)? So there’s no pixhawk involved at all? That’s quite impressive.
I suspect the lack of response is more just that there’s a lot going on and people didn’t really understand what you’re doing.
-Randy
--
Philip Rowse

Andrew Tridgell
> Well I at least am pleased with what I have done here and dont really
> comprehend why there is zero interest in it on here, so to avoid wasting
> any more time I am going to fork this now and go my own way with it.
to the point that I don't read every thread on drones-discuss, and it
wasn't until Randy just pinged me about this thread today that I read
it.
I'd previously misread the subject as being about adding an OSD to
ArduPilot, which isn't something I really need to help anyone with so I
skipped the discussion thread. Porting ArduPilot to a FreeRTOS based
board is much more interesting :-)
So I don't know if its too late, but having looked at your branch I have
a few comments, presuming you are interested in having this merged to
master.
I've been hoping someone would do a FreeRTOS based port of ArduPilot for
a while, as it would open up a lot of possible boards. The NuttX port
has served us well, but there are a heap of boards that FreeRTOS
supports and in many cases it would be a lot less work putting ArduPilot
on FreeRTOS than doing a NuttX port.
The architecture you've chosen is certainly quite different from our
other ports. It is somewhat of a mix between the approach we used for
the old AVR port (for APM1/APM2) and the approach we use for PX4 and
Linux.
Having a separate thread for I2C is something we are planning to do soon
for the PX4 and Linux ports. Lucas and I have been discussing having a
"thread per bus" approach. So if you have 2 I2C buses then you'd have
two dedicated I2C threads. The same goes for SPI - if you have 3 SPI
buses you'd have a thread for each.
What is more unusual is doing the handling of sensor inputs in the HAL
specific layers (assuming I've understood what is going on in your port
correctly).
We used to do some averaging in the HAL layer previously on PX4, but
we're been moving away from that and instead doing all of the processing
of sensor data in common code. The idea is to keep the sensor drivers as
simple as possible, and also allowing us to log raw samples (we can log
accel data at 1600Hz on PX4, which is great for vibration analysis). It
also enables things like the delta-angle/delta-velocity handling of IMU
data, with common code for coning corrections and improved accuracy in
the EKF.
Can you explain a bit about the quantracker library that your port uses?
In board_quan.mk it has this:
QUANTRACKER_ROOT_DIR = /home/andy/cpp/projects/quantracker/
Is that the FreeRTOS tree, or is this a layer on top of FreeRTOS? I'd
like to be able to build the port and it looks like I need some extra
dependencies.
I had a quick go at rebasing your port on top of current master and
there are a lot of conflicts. One of the things we ask contributors to
do is to make separate commits per directory and to mark the commit
messages with the directory being changed. That often makes rebasing on
master much easier. For example I get merge conflicts with changes in
libraries that really shouldn't be HAL specific (such as AP_NavEKF), but
I can't just tell git to skip those patches as they are mixed up with
changes to other parts of the tree.
What are your plans for this port? (now that we're no longer ignoring
you!) Are you planning on a PR to get this merged into master?
Cheers, Tridge

Craig Elder
Andy Little
Andy Little
Andy Little
Randy Mackay
Congrats!
One small question, why is it leaning sideways at launch?
-Randy
From: drones-...@googlegroups.com [mailto:drones-...@googlegroups.com] On Behalf Of Andy Little
Sent: 13-Nov-15 4:33 AM
To: drones-discuss
Cc: airt...@gmail.com; Craig...@uniserve.com
Subject: Re: [drones-discuss] Re: Ardupilot Flight Controller with onboard OSD
Maiden flight completed. N.B the short video is just highlights. The flight was a little longer than that :) However the legal 25 mW Vtx power in U.K. means I need an antenna tracker, to get decent video quality which hasnt been added yet, so I cut out much of the bits with poor video quality. Still much work to do therefore
--
Andy Little
On Friday, November 13, 2015 at 1:17:33 AM UTC, Randy Mackay wrote:
Congrats!
One small question, why is it leaning sideways at launch?
Andrew Tridgell
>
> Anyway, it flies, even if currently it has only proved itself so far as a
> glorified elevon mixer :)
Did you get a tlog for us to look at?
I notice you don't define HAL_OS_POSIX_IO, so I'm guessing the board
doesn't have a local filesystem for dataflash logs? If we could see some
logs we may be able to get a good idea of how well it may be able to
perform in auto flight.
Cheers, Tridge
Andy Little
On Friday, November 13, 2015 at 9:03:10 AM UTC, Andrew Tridgell wrote:
> https://www.youtube.com/watch?v=pU-V8o-kjuI
>
> Anyway, it flies, even if currently it has only proved itself so far as a
> glorified elevon mixer :)
Congratulations!
Did you get a tlog for us to look at?
I notice you don't define HAL_OS_POSIX_IO, so I'm guessing the board
doesn't have a local filesystem for dataflash logs? If we could see some
logs we may be able to get a good idea of how well it may be able to
perform in auto flight.
Andy Little
Andy Little
On Monday, November 16, 2015 at 2:42:34 PM UTC, Andy Little wrote:
Hi All,Still porting away :) Currently trying to catch up.Is the closest to master but the AP_InertialSensor code causes my OSD Artificial Horizon (ie showing latest IMU data) to update incredibly slowly, so something seriously wrong there. Lots change in ApInertialSensor recently?
Andy Little
Randy Mackay
Looking good.
-Randy
From: drones-...@googlegroups.com [mailto:drones-...@googlegroups.com] On Behalf Of Andy Little
Sent: 26-Nov-15 10:31 PM
To: drones-discuss
Cc: airt...@gmail.com; Craig...@uniserve.com
Subject: Re: [drones-discuss] Re: Ardupilot Flight Controller with onboard OSD
Quick update on the Ardupilot with Onboard OSD. I have been working on the problem of logging since the only available port I have left on the 64 pin part is a uart. I originally planned to use the Sparkfun OpenLog, but in testing, Unfortunately it doesnt seem to like being written at more than 19,200 baud. I was thinking of starting on an upgrade to a stm32 based version when I saw this product:
--
Andy Little
Randy Mackay
Cool, looking forward to the video!
-Randy
From: drones-...@googlegroups.com [mailto:drones-...@googlegroups.com] On Behalf Of Andy Little
Sent: 3-Dec-15 12:19 AM
To: drones-discuss
Subject: Re: [drones-discuss] Re: Ardupilot Flight Controller with onboard OSD
Quick update on this project
--
Andy Little
Andy Little
Andy Little

Josh Welsh
This is very, very cool.
From: drones-...@googlegroups.com [mailto:drones-...@googlegroups.com]
On Behalf Of Andy Little
Sent: Friday, January 8, 2016 8:17 AM
To: drones-discuss <drones-...@googlegroups.com>
Subject: Re: [drones-discuss] Re: Ardupilot Flight Controller with onboard OSD
An update on the project so you guys know its still alive :). Have had a few flights with the system now, despite the fact that UK is pretty wet and muddy at the moment. Here is a light from a couple of days ago, somehat more relaxed than the previous flights, since for once t it was quite a calm day so you can get more idea of the FC working. The Autopilot is sending position telemetry down the video link throughout the flight to the tracker. Onboard the plane is a 25 mW 5.8 GHz video transmitter. The range is not great and so (though it was quite wet, which reduces range), I need now to see if I can track down noise in the system. I have been over 2 km with a similar setup, though on a nice hot sunny day...
--
Andy Little

Lucas De Marchi
On Thu, Jan 21, 2016 at 7:52 AM, Andy Little <airt...@gmail.com> wrote:
> Update on this project.
>
> Having worked exclusively on Linux over the past few years, I recently
> decided to try to get things building on Windows. The choices there seem to
> be
>
> MingW
> Cygwin
> MingW64
> MSVC
>
> For now I have opted to just get it working in Cygwin. It seems the easiest
> for a user to setup and get running without issues as well as being still
> portable to other OS and compatible with current code
>
> As far as a diydrones/ardupilot PR goes, I have to admit that my feeling now
> is just to take this project off in its own direction. I dont really look
> forward to arguing my case to get a FreeRTOS port accepted, against a stack
> of Linux/ Nuttx boards. Having followed this list for some time, it seems
the Linux maintainer ;-) ).
> that that things are heading rapidly in the direction of Linux. That is
> great but I dont feel I have much to add there. I like microcontrollers at
> heart. The diydrones/ardupilot project also has moved a long way now from
> its Arduino roots. I would like to do something to get back in the Arduino
> direction. I thought about reviving the AVR branch, but I would ideally
> like to make something that allowed to be used on the old hardware somehow
posix-like interface. So we can have
saner HAL interfaces. Recently Tridge added support for QURT, that is
an RTOS much in the spirit of
nuttx and freertos. I don't think you'd need to revive the avr branch
for that, the main architecture of
ardupilot did not change much since the removal of AVR... we just have
lots of cleanups to remove some cruft
that accumulated over the years.
> The other issue is that the diydrones/ardupilot API is currently changing
> rapidly. I think that if I try to keep up with the changes, I will never get
> any useful work done on the areas I am interested in, such as a
too. This means it's certainly more difficult to "keep your own way"
and then try to come back. However I also see this as an incentive for
people to working more closely with upstream. More contributions to
upstream == everybody wins.
Lucas De Marchi
Andy Little
Lucas De Marchi
see answers below
On Mon, Jan 25, 2016 at 7:51 AM, Andy Little <airt...@gmail.com> wrote:
> Hi Lucas,
>
> Its not that simple...
>
> I decided that my priority is to get a finished board working with the
> Onboard OSD. This is quite a radical change.
>
> I also have had an ambition to make a generic mixer for Ardupilot for
> several years,. This is a radical rework too since you need to rip the guts
> out of existing code to do that.(e.g
> https://github.com/diydrones/ardupilot/blob/master/ArduPlane/radio.cpp#L161
> )
>
> Finally I am using FreeRTOS. I would say that FreeRTOS ( or other RTOS , but
> I cant find any docs for QURT?) is a good fit for a flight controller IO,
> since it plays well with hardware interrupts and event driven programming...
> I would guess better than Posix which is not really a real time OS at all,
> so I would be interested in the rationale for using POSIX ?
implement anyway it wants. It's up to the OS to do it in an
RT-friendly manner. Even for those that aren't, our HAL layer should
be able to abstract most of the things needed.
> In my case All these things OSD / OS / Mixer, are big changes and I would
> have to fight for them all in a PR. (Been there done that !) I think it
> would be impossible with my code as it is, no board and on top of that the
> Ardupilot codebase is changing rapidly.
>
> Based on the above reasoning I decided for now to freeze my Ardupilot
> revison and work on the parts I am interested in. This for me is just for
> fun after all !
saying you are trying to do 3 hard different things at the same time.
You could split it up and benefit from the code evolving together with
your changes rather than giving you lots of headache to keep it up to
date. As a first step, a HAL layer to support freertos for your board
could be done and then put the other things on top (or independently).
> When I have a finished board with everything working and have written some
> documentation then it will be easier. Maybe the Ardupilot API will be more
> stable too.
I said, keeping it as a fork will always be more trouble than trying
to integrate it the right way.
Lucas De Marchi
Andy Little
On Monday, January 25, 2016 at 6:33:21 PM UTC, Lucas De Marchi wrote:
HI Andy,
[...]
> When I have a finished board with everything working and have written some
> documentation then it will be easier. Maybe the Ardupilot API will be more
> stable too.
Problem with this approach is that code will never stop to evolve. As
I said, keeping it as a fork will always be more trouble than trying
to integrate it the right way.
Lucas De Marchi