URGENT: Pixhawk Gyro Drift causing crashes in flight

Oliver Volkmann
On March 15th of this year we had a very strange experience where, during an Auto Mission our Pixhawk (FW3.1.5) based SteadiDrone QU4D X started drifting off its flight line increasing in roll angle and speed. We tried to intervene however could not save the vehicle from crashing. We have until now not found out why this happened even with the help from Santiago. I discussed this issue with Andreas Breitenstein (a colleague of mine) who had a similar experience in Namibia on the 13th of March with a completely different drone equipped with a Pixhawk and FW3.1.5. During his auto mission, the drone did a very similar thing where it deviated from the flight plan and inevitably crashed. Yesterday we were testing some of the new features on another drone with a Pixhawk and FW3.2.1 and noticed that as soon as we put this vehicle down and powered it up, the horizon in mission planners HUD would drift in the roll axis constantly. At first I had thought that since I just put this drone together that perhaps the accelerometer calibration was not done properly and so repeated it in the field. We then flew 3 very nice flights in auto and tested some of the features. At the end of the 3rd flight, we landed and immediately noticed on the HUD that the horizon had drifted to about 45 degrees and continued to drift. We decided to see then if the pre-arm checks worked and tried to arm the unit which happened successfully even with the horizon at 45 degrees. Andreas then attempted to take-off to see if it was possible and the unit did fly, albeit, as expected it flew sideways and hit the dirt about 3 feet away.
We then re-started the drone and the horizon went back to normal. I enabled EKF as we have never flown with that and believed it to have far more safety features and that it would produce a far more stable flight. It was quite impressive and I flew the drone around quite a bit in POS-HOLD mode. As we stood there with the drone in POS-HOLD waiting for the battery failsafe to kick in, the drone started rolling to its right and flying away by itself even while I tried to roll left. It continued to fly away at which point I put it in Stabilize to try and prevent it from flying too far away however even Stabilize mode did not seem to help.
We have looked at the log files of all three flights which you will find attached to this email and have discovered that at the point at which each of these 3 flights went bad, there was a deviation between the two IMUs Gyros in either X1 to X2 and Y1 to Y2. We are now very concerned because we have a lot of drones out with our customers who have Pixhawks in them and this issue seems to happen randomly. All three drones (multi-rotors) which had the crashes all had different firmware, were flown in different locations and with different hardware/electronic components. The only thing that they share is that they all had Pixhawks on board and that they all experienced this strange Fly Away behavior which could not be stopped even when switching to stabilize.
Could
you please take a look at these logs and let us know what is going on? We are
pretty confident that this is not a firmware issue nor a stability algorithm
issue as the firmware versions vary and we have had this experience with EKF on
as well. We are at a loss as to what to do now other than test each and every
Pixhawk that we (and our various clients) have on a crash test drone as this
issue happens randomly. Sometimes it happens when it is powered via USB on the
desk, sometimes before take-off and sometimes during the flights which result
in crashes. We don’t know how many flights to do to replicate the issue but
will keep the logs of all of the upcoming tests and send them to you as we have
them.
If there are any tests or if there is any other information that you may need such as serial numbers please do not hesitate to let us know. Perhaps these pixhawks are faulty and could be associated with a batch production in which case it may be easier to determine which pixhawks suffer from this strange behavior.
Thank you in advance for your prompt attention to this matter and we look forward to hearing back from you soon.
Regards,
Oliver Volkmann
Micro Aerial Projects L.L.C.

Randy Mackay
Oliver,
So this is what we call “the leans” when it occurs in the roll-pitch. It can be caused by:
1. very bad vibration which leads to inaccurate accelerometer values which leads to the attitude not being corrected properly by the accelerometer values.
2. Inaccurate gyro bias which can be caused by:
a) Vehicle being jostled during the calibration at startup or during the first arming
b) A bug/issue in AC3.1.5 (and earlier versions) in which we did not reset the gyro bias estimate when we redid a gyro calibration. The effect was most obvious if the vehicle was left for a few minutes between when the battery was plugged in and the first arming/take-off. During these few minutes DCM/EKF would learn the gyro biases but those biases would shift to zero as part of the first arming calibration meaning DCM/EKF would incorrectly learned biases for another few minutes (until it “unlearn” them). Normally we only saw this issue in yaw but it could happen in roll/pitch.
c) Large temperature variations between the calibration and the rest of the flight.
From the logs #1 is not the cause because the vibes appear pretty low so I think it’s 2a, 2b or 2c.
In the AC3.2.1 log it appears to me that it switched automatically from EKF to DCM right at the end of the flight. DCM’s roll estimate was off by 20deg so that switch wasn’t good although the EKF only gives up and hands back control to DCM if it’s having serious problems. I’ve asked Paul Riseborough if he can take a look.
-Randy
--
You received this message because you are subscribed to the Google Groups "drones-discuss" group.
To unsubscribe from this group and stop receiving emails from it, send an email to drones-discus...@googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
Randy Mackay
Andreas,
Paul Riseborough (EKF expert) had a look at the logs and determined that in fact, it’s #1 (vibration). The high frequency vibration doesn’t show up well in the logs so it can only be seen indirectly which is why I missed it. The EKF is happy until the end but then at the end it develops a bad Z axis accel bias and the EKF becomes so unhappy with the data consistency that it’s flags itself as unhealthy and hands control to DCM .. which sadly was in even worse shape.
With a lot of vibration we get accelerometer clipping (where the accelerations go outside the 8G accelerometer range) and aliasing. When this happens DCM/EKF get an incorrect angle from the accels and then can’t correct the attitude estimate proper and we get “the leans”. Sometimes the clipping/aliasing appears only when the mounting/airframe/motors hit the right resonance which is why it can come and go. For example a particular throttle speed can be a factor.
There’s two things that could make it better:
Revisit the vehicle’s vibration isolation. We recommend:
· 3M vibration isolating foam sold by 3dr: https://store.3drobotics.com/products/pixhawk-foam
· Paul says the pink vibration foam is as good or better than the 3M foam but it requires double sided tape as well
Upgrade to AC3.3 when it’s released (currently in beta testing – you can try it now if you want). We think this version will be more resilient to vibration because we’ve increased the accel range from 8G to 16G which will reduce the chance of clipping. We’ve also reworked the filtering (I’m not qualified to explain the new scheme but Paul or Leonard could).
On the code side there’s two things that we could do to help you and other people facing this problem:
· Add in-flight vibration monitoring (i.e. look for clipping) so that we can alert the pilot that vibes are getting bad hopefully before it affects flight.
· Stop the EKF from handing control to DCM unless DCM reports it is happy. In your AC3.2.1 crash log DCM was not happy (i.e. ATT message’s ErrRP field was 0.8 which is bad, 0.1 is good).
So this info from Paul changes things and probably some of your concerns but here’s some answers to your questions in any case:
· The vibration issue isn’t related (as far as we know) to whether you’re using an APM or Pixhawk. Theoretically the Pixhawk should be better because it has two IMUs that operate at different frequencies meaning it should be less susceptible to aliasing.
· Re 2c, this failure is a bit theoretical. We know temperature affect the gyro drift but we actually in the thousands of logs we’ve looked at, we have not identified a case of this causing a crash.
· Both DCM and EKF can learn the gyro drift at up to 1deg/sec per minute so generally when we’ve seen problems caused by the gyros, it’s been early in the flight (within the first few minutes) before DCM/EKF have had time to learn the offsets.
So, I think in the short-term looking at the vibration isolation is the best move, then move to AC3.3 when it’s released.
Sorry for your troubles, hope this helps some.
-Randy
From: Andreas Breitenstein [mailto:and...@aeromapix.com]
Sent: 24-Apr-15 6:15 PM
To: 'Randy Mackay'; drones-...@googlegroups.com
Cc: ch...@3drobotics.com; 'Micro Aerial Projects L.L.C.'
Subject: RE: [drones-discuss] URGENT: Pixhawk Gyro Drift causing crashes in flight
Hi Randy,
All this is a bit disturbing especially as this is not really documented anywhere and that this can apparently happen during flight at any time.
I have some questions concerning the problem that arise on point 2(c).
What do you suggest one can do about this?
Also, have you got any Idea if this is also a problem on the Arduplane code?
We often fly for long periods of time (up to 2 hours) and this lean would be a disaster if the plane or hardware heat up or more than likely cool down during flight.
Is this fault present on the Pixhawk only? I have some copters on APM and they have been flawless for the past 2-3 years now.
Thank for your prompt response.
kind regards
No virus found in this message.
Checked by AVG - www.avg.com
Version: 2015.0.5863 / Virus Database: 4334/9611 - Release Date: 04/24/15

Radek Voltr

Andy Piper
On Friday, 24 April 2015 15:03:25 UTC+1, Randy Mackay wrote:
· Add in-flight vibration monitoring (i.e. look for clipping) so that we can alert the pilot that vibes are getting bad hopefully before it affects flight.
+1000
I'm fairly new to all of this, but clearly bad compass messes you up and bad vibrations or IMU messes you up - both potentially diastrously. Any in-flight diagnosis is a huge step in the right direction. When I look through the code I see a lot "if this thing is bad do this other thing to prevent disaster", which is good from a defensive programming point of view but has two bad consequences:
Andy Piper
1. It masks hardware failure. Most people want to know about hardware failure so that they can beat up the supplier - not crashing with hardware failure is good, not knowing is worse IMO.
2. The transition between alternatives can be confusing or lethal, especially if the alternative is only less-bad. Often I would prefer to know that this happened and immediately land, rather than cope and carry on.
[FWIW The roll right fly-away has happened to me and others and my issue is compass rather than vibes.]
andy
Randy Mackay
Andreas,
Ok, the bench test issue you’re seeing is related to a gyro calibration and/or gyro drift (could be 2a or 2b) plus the way we changing the weighting of accels vs gyros when armed vs disarmed. So the HUD rolling as soon as the vehicle is armed can happen because while disarmed (and landed) we give higher priority to the accelerometers than we do during flight. While on the ground the correction from the accels can compensate for the bad gyro drift/calibration but once the vehicle is armed and we weaken the accel correction the gyro drift causes the attitude estimate to rotate away from reality.
We do this change in accel/gyro weighting (only in copter) because during flight the accelerometers are more susceptible to vibration than the gyros but while on the ground (during startup or brief periods of being landed) we want to correct the HUD back to reality as quickly as possible.
You’re being careful not to jostle the copter while the pixhawk led is flashing red/blue during startup?
@Andy,
I agree with your point that we should not mask hardware failures. I think with AC3.2.1 if the MPU6k fails we alert the user by setting the IMU unhealthy with the MP shows as “accel bad”. For the switch between DCM/EKF you’re right that we need to make it more obvious in the logs when that happens and alert the user that things are going wrong. AC3.3 is the first version which will have the EKF on by default so we’ve done some work including adding an EKF_STATUS_REPORT message that we hope the GCS people will implement.
Tower: https://github.com/DroidPlanner/Tower/issues/1437
AP Planner 2: https://github.com/diydrones/apm_planner/issues/693
-Randy
From: Andreas Breitenstein [mailto:and...@aeromapix.com]
Sent: 24-Apr-15 11:29 PM
To: 'Randy Mackay'; drones-...@googlegroups.com
Cc: ch...@3drobotics.com; 'Micro Aerial Projects L.L.C.'
Subject: RE: [drones-discuss] URGENT: Pixhawk Gyro Drift causing crashes in flight
Hi Randy,
Thank you for the hard work and the detailed answer. I can however not take this as an answer that I can live with. As far as I am concerned, there is something else going on here.
The fact that the copter that crashed on 3.2.1 showed a offset in the HUD by some 30* just as it was connected to telemetry with it standing still on the flying field. The HUD continued to turn up to some 45* until we restarted the copter. On this same day, the same copter stood still on the lawn on the field with the HUD showing level until!! I armed the copter at this point the HUD started rolling as soon as I throttled up it rolled up to 45* and the copter flipped on takeoff. This flip was not by accident, but was induced by me to see if the copter would even take off.
That same copter when connected to the USB on my office table would show everything in order then when armed with the radio the HUD will start rolling in a random direction. All this without the Battery even connected.
If it shows level after connecting I leave it connected for some time (maybe 10 minutes) If I look at the Mission Planner again the HUD will show a drift of some 15* to 45* at random.
All this has nothing to do with vibration but is a bug somewhere. I suspect that there is a faulty batch of Pixhawks out there.
I will send the Pixhawks that have this problem back to the US with Oliver and maybe you could arrange for someone to look at them.
Thank you
Kind regards

Al B
When you wrote "I will send the Pixhawks that have this problem back to the US", do you mean that you have other batch of Pixhawks that don't have this issue?
Also, do you see the same behavior if you load/use the PX4 Flight Control Stack instead of the APM firmware and use QGroundControl instead of Mission Planner? That might help to isolate the root of this issue from the software standpoint.
Al B
"That same copter when connected to the USB on my office table would show everything in order then when armed with the radio the HUD will start rolling in a random direction. If it shows level after connecting I leave it connected for some time (maybe 10 minutes) If I look at the Mission Planner again the HUD will show a drift of some 15* to 45* at random."
I didn't mean that you should try to flight using the PX4 Flight Control Stack to see if crashes.
Andy Piper
I'm looking forward to trying 3.3, sounds like it will be a big improvement.
My $0.02 :)
andy
From: Randy Mackay [mailto:...@yahoo.com]
Sent: 24 April 2015 07:41
To: drones-...@googlegroups.com
Cc: ch...@3drobotics.com; and...@aeromapix.com; 'Micro Aerial Projects L.L.C.'
Subject:
...
Oliver Volkmann
From: Randy Mackay [mailto:...@yahoo.com]
Sent: 24 April 2015 07:41
To: drones-...@googlegroups.com
Cc: ch...@3drobotics.com; and...@aeromapix.com; 'Micro Aerial Projects L.L.C.'
Subject:
...
Oliver Volkmann
Randy Mackay
Oliver,
If this can be reproduced on the bench then it would be good to do this:
· Ensure the Pixhawk has AC3.2.1 loaded on it (or alternatively AC3.3-rc1 if you prefer)
· Set the LOG_BITMASK to ALL+DisarmedLogging (ie. “131070”)
· Restart the pixhawk and attempt to recreate the problem (i.e. set the board down, try arming and see if the HUD begins to roll).
· Download the dataflash logs from the test and send it to Paul and I
I don’t know about the serial numbers of boards with the MPU6k accelerometer issue. Maybe Vu from 3dr could advise. So far we haven’t seen that failure in the logs you’ve sent along though so there’s no reason to think it’s that particular MPU6k accelerometer issue that 3DR had from June-2014 to this Feb-2015.
-Randy
--
Al B
I should have also clarified that I was not suggesting to switch to the PX4 Flight Control Stack for your product line. I just mentioned that option because ardupilot builds on top of that stack so it would have allowed to determine if the problem manifested on the bench was specific to the ardupilot code; which is the firmware that Randy and this group lead. However, my suggestion might now be irrelevant after I saw your previous comment saying that you have 3 Pixhawks that do not have this issue and 3 units that DO. At this point, it is probably better wait until Paul and Randy analyze the dataflash logs they are asking for.
One question though. When you wrote, "All this without the Battery even connected.", does it mean that you are powering the copter only with the USB from the computer when you run your bench tests?
Oliver Volkmann
Oliver Volkmann
Oliver Volkmann
Randy Mackay
Oliver,
Yes indeed, as you say, this log shows an IMU failure (the MPU6k). Assuming this Pixhawk was purchased between June-2014 and Feb-2015 it should be returned to 3DR and I suspect they will send a replacement. My understanding is the MPU6k failures are due to a manufacturing issue so on the software side, all it can do is alert the user and try and cope. It looks like the fail-over to the 2nd IMU worked and the pilot got the copter back hopefully in one piece? If yes, then that’s a success!
By the way, the vibes on the vehicle look pretty high and possibly the pitch tuning is a bit off. There are places where the desired and actual pitch go off by as much as 20deg although perhaps there were some environmental factors making the control this bad.
Oliver Volkmann
Randy Mackay
Oliver,
My guess is that the two issues are not related to each other. So this most recent log was clearly an accel failure but that failure doesn’t appear in the earlier logs we saw which developed the lean. I suspect that in this most recent failure the user didn’t see the leans right?
I don’t think that sending the boards into 3DR will help get to the root cause. With such an intermittent problem, I suspect if they look over the boards (from a hardware point of view) and nothing will turn up. Of course if a replacement board(s) is good enough then an RMA with 3DR is a quickest solution. Of course we would then be left with the nagging doubt of what was wrong and could it happen again.
We just need to be able to reproduce the issue to nail the cause down. My guess is it’s vibration and not being able to reproduce it on the desk is consistent with this (although it’s not proof). If it is vibes then I suspect AC3.3 will solve the problem and will include faster logging of IMU data and will likely also include warnings of accelerometer clipping.
Oliver Volkmann
...
Oliver Volkmann
Randy Mackay
Oliver,
Ok, thanks for the determined testing. You may have uncovered the issue!
If the 1st IMU (the mpu6k) fails to start-up (like it did in the problem log you provided), the 2ndary lsm303d will becomes the 1st IMU but the code will use the offsets and scaling meant for the mpu6k. In AC3.1.5 we had a similar problem with the compasses and we put a lot of effort into AC3.2.1 to ensuring this kind of error could never happen (with the compass). I don’t think it ever crossed our minds that the same thing could happen with the accels.
I’ve just done a test and confirmed that the issue happens with master. On my particular pixhawk the lean angle difference between the two accels is only about 2.5deg but on you vehicle’s board I think it’s closer to 7 degrees so this could explain the lean.
so we have a bug to fix – we should certainly ensure that all expected accels are present and if not, fail to arm or at least use the correct accel offsets and scaling.
Thanks very much for this.
--
Andy Piper
andy
...
Andy Piper
andy
On Monday, 11 May 2015 20:04:08 UTC+1, Randy Mackay wrote:
...
Randy Mackay
Andy,
This IMU failure should be quite rare and I don’t think most people should see it.
Immediately after the first upload of AC3.3 to the board and before the required accel calibration, I’d expect a lean but otherwise I wouldn’t expect it to lean any more than AC3.2.1 I think.
For the logging, yes, we certainly need some kind of logging of accel health. That could be an event message if an accel becomes unhealthy or it could someone log what the blend of IMU1 vs IMU2 is (that info is in the AHRS). That blending has changed a bit - at one point it could slide up and down from 0% ~ 100% for each accel but it may be locked at 50/50 now as long as the accels are reporting healthy.
-Randy
--
Oliver Volkmann
...
Oliver Volkmann
...
Andy Piper
On Monday, 11 May 2015 20:25:54 UTC+1, Randy Mackay wrote:
Andy,
This IMU failure should be quite rare and I don’t think most people should see it.
Immediately after the first upload of AC3.3 to the board and before the required accel calibration, I’d expect a lean but otherwise I wouldn’t expect it to lean any more than AC3.2.1 I think.
For the logging, yes, we certainly need some kind of logging of accel health. That could be an event message if an accel becomes unhealthy or it could someone log what the blend of IMU1 vs IMU2 is (that info is in the AHRS). That blending has changed a bit - at one point it could slide up and down from 0% ~ 100% for each accel but it may be locked at 50/50 now as long as the accels are reporting healthy.
andy
-Randy

James Harrison
Hash: SHA1
On 11/05/2015 20:25, 'Randy Mackay' via drones-discuss wrote:
> For the logging, yes, we certainly need some kind of logging of
> accel health. That could be an event message if an accel becomes
> unhealthy
>
hardware failure (in any system, but particularly the IMU) would be
flagged up as both an item in the logs and as an event message for my
GCS to alert me to. Depending on payload/vehicle, a failed IMU at
startup is likely to make me go back to the bench and test, test, test
(or replace) rather than fly. Which is the right outcome!
- --
Cheers,
James Harrison
-----BEGIN PGP SIGNATURE-----
Version: GnuPG v2.0.17 (MingW32)
iQIcBAEBAgAGBQJVURL0AAoJENTyYHL8dmp9r2gP/igt1Cs4k9YY2Tq18qM/uDHG
OWSTLyIqj/i4CCtzVdoAnOFbCJ4BowgsHVXf4H56pLBVYcf+AsrB2OYtguqvY0F7
k/1fkdKOpNgm8k8PEItcIg8xJ/zN68HpmTfGT2zviPaimD9hO/iukyqutbVKK5o/
+A42X5j4uMF0ky40AdsJGus/e3jBGxat/Ml4akBbggPoitqMW+fuucCzoKLxFl4/
TklWzUdMLA7sEKSNGelqJ0uWo4Y9Z5M5IOSvwmIS87t4Q+P6Ota1+YF65Y4Dy9Mc
yFNLOgk1pqHnRGbOphBFua8doGY4BookkcguRirtJH+EDq6UNiIn6eVFdApQtqs4
RUa/hoT5swE4c+T+S+w0ga94job1RCIP+ieYOuL3TZgR2/05n6TsON/XIhJTrTyJ
BfIvMgYfHCdU4ZUHIwcbJSWG8DHrOu9iRDCiCyPrESTlQKaE96T8MH2+kkGOEoqm
ACEV4UzmwEL6Q0CC5eBeAx3bpi5hFBeAxKePBJDJS61XeOlfxrrl3zRRTzfFM9De
FQscWd15YD/KyytNTLFQ57DDJityUtV3BwPNOaZlHb6ejbkNLRnFB6YRV5WOV2Oi
EYrwBHYQ/pkd87MAx3zgfNBgQTFNoCOLu/AajSWSjQPHGOh9TCQdnyxrZfyPIZ5g
xq4D5bb8uG2pdfZ0B4b7
=j4D0
-----END PGP SIGNATURE-----
Andy Piper
andy

Andrew Tridgell
The reason we accept starting with no MPU6000 is that very early Pixhawk
boards didn't have an MPU6000.
What I suggest we do is have an arming test that checks if more IMUs
have calibration values (from accelcal) than we currently have. If so
then fail to arm saying that the number of IMUs has changed.
So if we have non-zero offsets for Accel2 but only have one accel then
consider that an error and don't arm.
Cheers, Tridge

Andrew Chapman
--
Andy Piper
Randy Mackay
Oliver,
A fix is in master now so it’ll go out with AC3.3-rc4. This fix is what Tridge described on this thread in which we check that all calibrated accelerometers are present as part of the pre-arm checks for all vehicles.
This particular bug of using the wrong offsets/scaling shouldn’t happen in-flight so it not going to directly fix that problem.
In one of the earlier logs, the EKF was having problems and it gave up and handed back control to an even worse off DCM. We still plan to make that much less likely to happen for copter at least as part of AC3.3.
-Randy
From: drones-...@googlegroups.com [mailto:drones-...@googlegroups.com] On Behalf Of Oliver Volkmann
Sent: 12-May-15 4:40 AM
To: drones-...@googlegroups.com
--
Oliver Volkmann
So I guess a different issue was uncovered than the one that I originally posted about. Could there be a link between the two issues? The leans in flight are of more concern to us than those on the ground for obvious reasons. Based on the in flight logs I sent, do you see and evidence of one of the IMU rebooting or failing momentarily just long enough to get different offsets and cause these leans? We still don't know how the in flight leans start. UT they happen and happen randomly. Any test we can do to find out why it is happening?
Oliver
Randy Mackay
Yes, it's likely a different issue.
From our previous analysis we thought it was vibration that was the cause. That cause fits with the evidence in that it can't be reproduced on the bench, and aliasing can happen suddenly just due to the motors hitting the right frequency with other components on the board.
There's a bunch of things in AC3.3 to improve the vibration performance including increasing the accel range, better filtering and fixing the 'whiskers' bug. We want to do a little more including adding detection of clipping and reducing the chance of falling back to DCM. So maybe the problem simply won't happen again once the vehicles move to AC3.3.
I think the best test to do is to capture some logs with the full rate IMU logging using AC3.3-rc4 which could be out as soon as this weekend. Testing that on a problem copter might show us how bad the vibration levels are on the vehicles.
-Randy
-----Original Message-----
From: drones-...@googlegroups.com [mailto:drones-...@googlegroups.com] On Behalf Of Oliver Volkmann
Sent: 12-May-15 8:33 PM
To: drones-...@googlegroups.com
Subject: RE: [drones-discuss] URGENT: Pixhawk Gyro Drift causing crashes in flight

Brad Bosch
The relatively small offset after calibration that many people are seeing in 3.3 sounds like the bug I reported and fixed last weekend. It only affects frame configurations with non-zero controller orientations which explains why many don't see it. The developers don't seem to have noticed and triaged my report yet (judging by the lack of tags on the bug and pull request). https://github.com/diydrones/ardupilot/pull/2271
Andy Piper

ErrYaw like I have in other flights, so I'm not sure what this is causing - if anything, but still doesn't seem great.
So I clearly have a problem with my pixhawk in IMU2. So that's one datapoint. But I would bet a beer I am not the only one.
I'll put together a pull request for the IMU health patch.
Cheers
andy
Andy Piper
Andy Piper
1. Why would my Gyro health be bad but not Accel health for the same IMU? Is this likely? Could it indicate software rather than hardware?
2. Is my Gyro issue the same issue Oliver is seeing?
3. Is my Gyro issue grounds for replacement by 3DR?
4. If one of the Gyro's keeps bugging out what is the net effect on flight peformance. Is it linked to how closely the two gyros agree?
I had the exact same issue with my compass which led to several hundred dollars worth of damage, so forgive my paranoia!
andy

Tom Coyle
Andy Piper
and encountered similar issues. I'll try one generated before my patch see if that's the same.
andy
Andy Piper
andy
On Sunday, 17 May 2015 16:00:35 UTC+1, Tom Coyle wrote:
Oliver Volkmann
Oliver Volkmann


Oliver Volkmann

Robert Lefebvre
Andy Piper
Oliver, it would be worth you trying rc5 when it comes out as it has some additional instrumentation around the IMU health. I think there is a good chance that you are simply seeing one IMU dropping out in flight (as per Randy's initial analysis) and given the differing offsets the leans then set in. My understanding is that the offset issue will be/is fixed, so rc5 may be better for you anyway. But if the health of your IMUs is suspect you still want to know that.
Andy Piper
I see the drift, but it's not very large.
The bad gyro health is known - fixed in rc5.
Were these logs after you had calibrated? Your IMU Accel values do not seem to agree very much between the two IMUs.
Is this configured as you would fly it? The logs indicated you are using the internal pixhawk compass, you would be much safer with an external compass.
andy
Oliver Volkmann
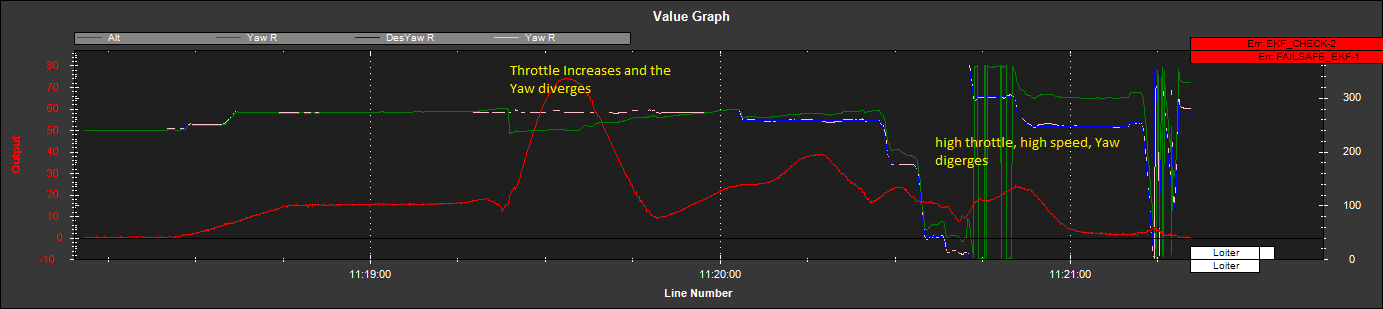
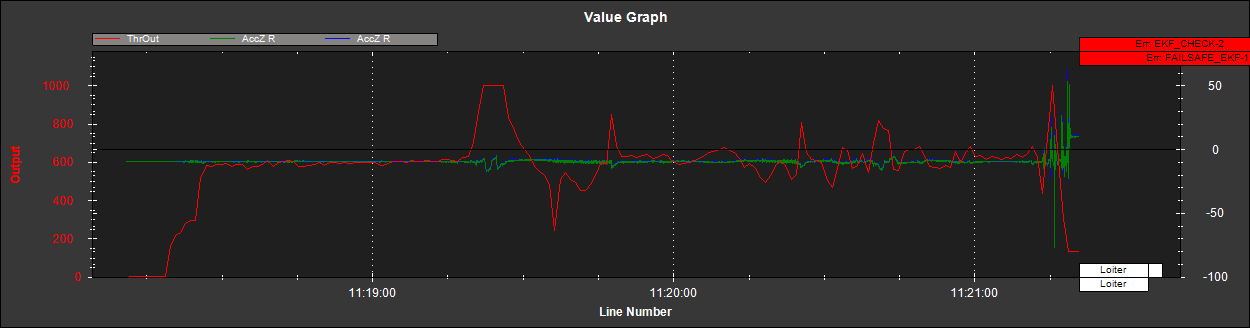
This instance of the drift is not causing me a problem but what has happened in the past is that we have had 3 instances where the two gyros suddenly start diverging in flight which I believe is causing the leans because shortly after they diverge, the copters just fly off and are not controllable anymore and have crashed. What I am trying to do now is to replicate what was going on in flight with these individual pixhawks (3) to see if we cant find the source of this very randomly occurring yet fatal problem.
Oliver Volkmann
Andy Piper
Randy Mackay
Andy,
Thanks for the link. I had a look at the logs he has and I’m pretty sure he’s got two separate issues:
1. Near fly-away with AC3.2 caused by a GPS glitch ß he has logs and we can see the GPS glitches, there are no IMU failure.
2. IMU failure causing the attitude to roll over ß no logs yet
Hopefully he can provide logs for the 2nd issue because it would be interesting for Paul to have a look and see why the EKF doesn’t handle it. We do see the AHRS bad message on the MP HUD though so the FC knows it’s sick.
-Randy
Andy Piper
Incidentally I have upgraded to rc5 and am getting the occasional "Bad AHRS" on the bench. Will do some flights this weekend and dig a bit more.
andy
Andy Piper
The troubling thing is that the IMU shows as healthy the whole time, it's just giving bad data. I also don't understand why this much divergence cause such a massive roll, is it just that I am reading the values wrong? Is there any way that this can be detected? Seems like a hard problem, but one worth solving since the effects are so disastrous.
andy
On Saturday, 23 May 2015 07:59:47 UTC+1, Randy Mackay wrote:
Andy Piper

On Thursday, 21 May 2015 14:16:34 UTC+1, Oliver Volkmann wrote:
Randy Mackay
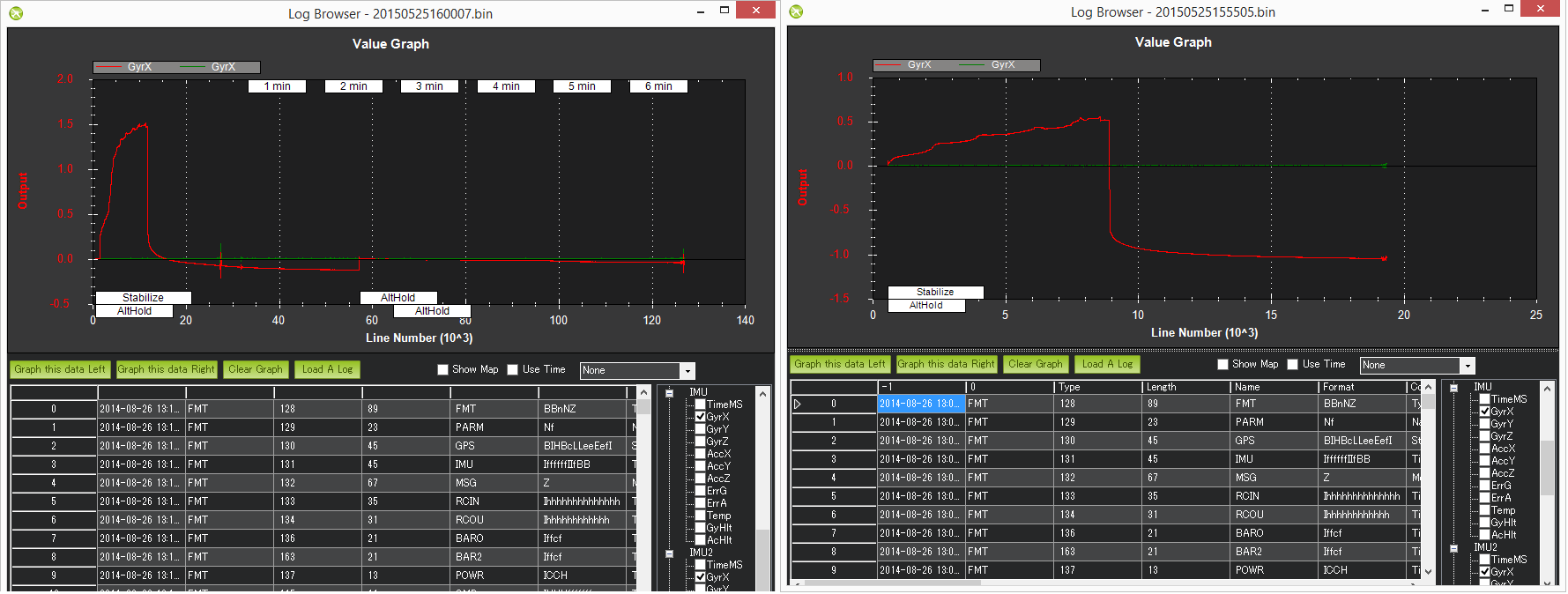
Yes, here’s a graph of ErickR’s guys roll-gyro.. He’s two logs that show the same issue (and two that don’t), a quick summary:
· the IMU6k’s roll-gyro’s offset suddenly changes by about 1.5 deg/sec after the sensor has been on for just over 1 minute. It’s not clear if it’s always 1 minute, in Erik’s video it starts rolling after much more time has passed.
· It’s always the same gyro that goes bad for this user.
· The EKF doesn’t deal with the situation much better than DCM it seems, both roll over
· No communication errors are recorded, the sensor doesn’t become unhealthy.
We will ask Tridge and Paul to have a look tomorrow to see if they have any ideas.
Drones-Discuss thread from Erick R: http://diydrones.com/forum/topics/iris-massive-yaw-issue
-Randy
From: drones-...@googlegroups.com [mailto:drones-...@googlegroups.com] On Behalf Of Andy Piper
Sent: 26-May-15 9:17 PM
To: drones-...@googlegroups.com
Oliver Volkmann

François Kneib
I started to follow this discussion yesterday and I am maybe concerned by the same (or similar) problem. I have a pixhawk since January 2014, but less vibrations than Oliver. I think I have a GyrY offset, causing my copter sometimes to lean. Activating AHRS_EKF_USE = 1 caused to my copter a random, high and sudden pitch lean that I hopefully managed to compensate until now.
You can have a look at the full logs and description at my post on ardupilot forum : http://ardupilot.com/forum/viewtopic.php?f=80&t=12601
Regards,
François.

Jeremy Hanks
Is there any definitive way to find out if a genuine pixhawk is at risk of having these issues?
I worry that 3dr is not going to be doing much to remedy the problem before it causes a crash that can be proven that it was a bad gyro.
Andy Piper
andy
Randy Mackay
As Andy says, the “whiskers” are really bad in this log (the whisker problem is actually present in AC3.2.1). Also the PM message shows a much higher than normal number of slow loops (about 10% vs 1% ~ 4%) so something bad is happening.
I agree with Andy that trying AC3.3-rc5 (using MP’s beta firmwares link) would be a good test with.
It doesn’t look like the regular MPU6k failure that Pixhawk’s suffered from between June-2014 and Feb-2015 of last year but it could be an odd variant of that.
So something is wrong but it’s not clear to me what it is.
-Randy
--
François Kneib
- What is the "whisker" bug you are talking about ? I didn't found anything about this. I will try AC3.3-rc5 ASAP and show you the logs (sunny days in France at the moment, perfect for flights :-)
- I have the tools and skills (I hope) to replace the MPU6K on my Pixhawk. I thought it could save me, but I am afraid by Randy's message about slow loops ...
- Do you know how I can have more informations about those slow loops ? Can they be linked to the bad MPU6K ? Or the power module (I see that Oliver's Vcc oscillates between 5.2 and 5.25, while mine between 5.15 and 5.21) ?
François Kneib
I just watched an old log I have made with AC3.1.5 (1K loops between two MPs), and I have a low NLoops, between 0 and 4.
François Kneib
I updated, reseted all the settings then made all the usual hardware calibration and configuration.
My first observation was that I was unable to set some parameters, like serial2_baud (forced to 9) or angle_max (forced to 4500). This is not the question here, I think you already know about them.
What it have now:
- my NLon seems normal I think (ouf), below 100 out of 4000 -> max 2.5% ;
- the level accuracy was as good (acceptable, though not perfect) as with AC3.2.1, ahrs_ekf_use enabled ;
- on the log, EKF1.pitch == ATT.pitch (normal because EKF is enabled ?)
- AHR2.pitch is really far from EKF1.pitch (sometimes 10° ...)
Something that is still unclear to me:
- if EKF is disabled, where do ATT and AHR2 values come from ? (respectively, IMU or IMU2 ?)
- if EKF is enabled, it seems to feed ATT which is logic. But then, can we still get the AHR separately from IMU1 and IMU2 ? And where do AHR2 get its data from ? (IMU, IMU2 ?)
Conclusions:
The flight I made today was almost good, but in this situation I can't be sure that the dangerous "high and sudden lean" will not occur any more. Regarding my log and the results of both IMUs, do you think I should try to replace it ?
Again, thanks guys, for the support but also for all the work you do on that code.
Regards,
François.
Randy Mackay
That’s a very powerful copter you have there. With a fresh battery it hovers at just over 30% throttle, pulls 3Gs climbs and at one point climbs at just over 15m/s. Do the leans occur only after high speed maneuvers or at anytime?
Yes, the timing is looking much better in the logs and the whiskers are gone.
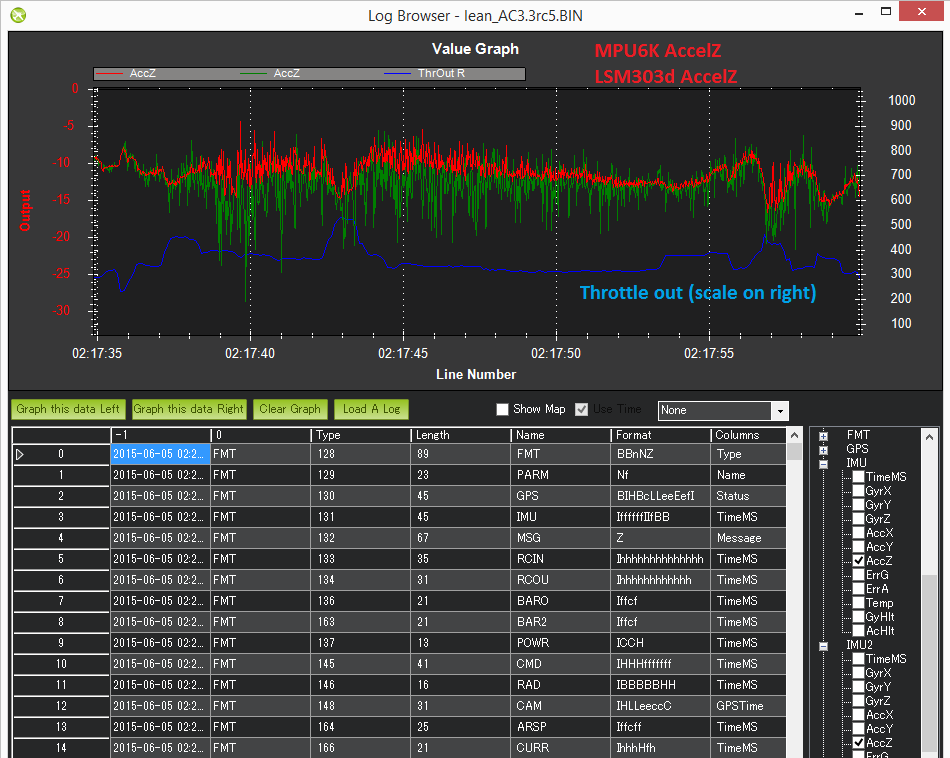
There’s actually a lot of noise coming from the 2nd IMU, the LSM303d (not the mpu6k) but I’ve checked my own logs and they also show this. We will look into this a bit more but it may not be related to your problem.
With AC3.3 the EKF is always on by default, in fact, you’ll see there’s no EKF_USE parameter anymore. For attitude estimation DCM is still running in the background and it’s estimate appears as AHRS2 in the logs. Both EKF and DCM use all accelerometers and gyros.
Unrelated to you question, I think you may find AC3.3 better than previous versions especially at full throttle because of the improve throttle curve. I would have expected earlier versions to shake at full throttle but that should be reduced now (maybe).
-Randy
--
Randy Mackay
Francois,
Paul and I had a look at your logs and there’s definitely some aliasing going on with the accelerometers which is normally a sign of high vibration on the copter. You’re using vibration isolating foam to attach the flight controller to the frame of course?
-Randy
From: Randy Mackay [mailto:rmac...@yahoo.com]
Sent: 5-Jun-15 10:50 AM
To: 'drones-...@googlegroups.com'
Subject: RE: [Bulk] Re: [drones-discuss] URGENT: Pixhawk Gyro Drift causing crashes in flight
That’s a very powerful copter you have there. With a fresh battery it hovers at just over 30% throttle, pulls 3Gs climbs and at one point climbs at just over 15m/s. Do the leans occur only after high speed maneuvers or at anytime?
Yes, the timing is looking much better in the logs and the whiskers are gone.
There’s actually a lot of noise coming from the 2nd IMU, the LSM303d (not the mpu6k) but I’ve checked my own logs and they also show this. We will look into this a bit more but it may not be related to your problem.
With AC3.3 the EKF is always on by default, in fact, you’ll see there’s no EKF_USE parameter anymore. For attitude estimation DCM is still running in the background and it’s estimate appears as AHRS2 in the logs. Both EKF and DCM use all accelerometers and gyros.
Unrelated to you question, I think you may find AC3.3 better than previous versions especially at full throttle because of the improve throttle curve. I would have expected earlier versions to shake at full throttle but that should be reduced now (maybe).
-Randy
From: drones-...@googlegroups.com [mailto:drones-...@googlegroups.com] On Behalf Of François Kneib
Sent: 5-Jun-15 6:37 AM
To: drones-...@googlegroups.com
--
Andy Piper
François Kneib
My copter is powerful, yes. I always have to decrease default gains by 40% and autotune was not able to give me good results with AC3.2.1 (do you have a link where I can find solutions for this ?).
Also, I'm coming with a lot of news. My pixhawk was fixed with foam and double-sided tape. I always performed my vibration tests in a hover state, and they were good.
As you suggested a vibration issue I verified that my props are almost balanced (just by making them spinning, one by one, at 75% throttle and touching the arm with my hand). Looks like they were ok, as adding some tape increased the vibration regardless to the side I putted the tape. Then I changed the mounting foam of my pixhawk for a really softer one (I don't have the 3DR foam any more).
Let's go for a flight, here is the log. As you suggested, I tried fast climbs at 3 different throttles (plot RCIN.C3 between lines 16800 and 28000). Now AccZ vibration looks very low. The good thing is that it seems I don't have IMU discrepancies any more, and the copter was able to maintain a good level. Can you confirm that all IMUs are ok now ? If this is the case, it means to my mind that: i) vibration tests have to be done a different climbing rates, ii) with EKF, having high vibrations could cause the sudden lean problem, which can be very hard to recover while in the air ...
Now lets go with the bad news: I reseted my parameters and autotune is not satisfactory. But I forgot to increase the ATC_RATE and ATC_ACCEL parameters. I turned my copter to acro for a couple of flips, but the behavior was not the same as usually (default values for ATC_RATE and ATC_ACCEL are low ...). So I thought it could not flip, try to recover and badly crashed ... Broken 1 LiPo, 1 propeller and the GPS mast (which is an aluminum fuse). For analysis, this is the log file that I cut before triggering acro mode. Have to wait the next week for further test !
Thank you and have a good week-end,
François.
Andy Piper
Andy Piper
But your pixhawk looks pretty normal at this point IMO.
On Friday, 5 June 2015 14:59:14 UTC+1, François Kneib wrote:
Andy Piper
The EKF blows up because of bad compass readings, but the compasses agree very well and it's on an IRIS, so you would expect it to be calibrated pretty well.
Right before the EKF blows up it looks to me like there is gyro drift on GyrY. Am I reading this right? Could this be the cause, or is it just some user configuration issue?

Craig Elder
--
Andy Piper

François Kneib
I have seen the error 19, but didn't found anything about it. It happens twice, both conducted to an arming fail (I think I tried to arm, and the fail causes the error report).
On GyrY, I still have a small offset building up during the flight. The consequence is not noticeable thought, so I'm ok with that.
The two magnetometers mismatches are highly correlated to the ThrottleOut as I didn't performed the CompassMot calibration (will do it asap) and my external compass is on a 11cm mast. I'm wondering, why do we spend so much effort on putting the external magnetometer far from electromagnetic interferences if the internal mag is also used ? If I set COMPASS_USE2=0, will I disable the internal one ?
Andy Piper
Craig Elder
--
Andy Piper

Philip Rowse
François Kneib
Randy Mackay
I’m not totally up to speed with the conversation but I think we are going to be forced to add some real-time vibration monitoring into AC3.3. That would at least include clipping detection but it might also include some other number that tries to capture the level of vibration.
-Randy
From: drones-...@googlegroups.com [mailto:drones-...@googlegroups.com] On Behalf Of Philip Rowse
Sent: 9-Jun-15 6:06 PM
To: drones-...@googlegroups.com
Cc: craig...@uniserve.com
Subject: Re: [Bulk] Re: [drones-discuss] URGENT: Pixhawk Gyro Drift causing crashes in flight
Great point Andy...
Andy Piper
You read my mind :) Having a number which is a measure of vibration for each IMU spat out by the FC is definitely the way to go here.
andy
Robert Lefebvre
Robert Lefebvre
Andy Piper
Robert Lefebvre

john...@gmail.com

linus
Andrew Chapman
+1
Oliver Volkmann
2015-06-23 11-11-51 L.log, and 2015-06-23 12-26-16 L.log that there is a deviation between IMU1 and IMU2 GyroX. These flights thankfully did not result in a crash, but this one did: 2015-06-23 15-34-47.log. The strange thing is I cannot for the life of me pin-point what happened with this last flight. Could anyone go through this and tell me what happened? The Pixhawk is a brand new one that I got from 3DR about 2 weeks ago. Not sure if there are any real issues in the flights preceding the crash flight however just seeing a deviation in the Gyros again makes me question whether or not this is a case of the leans that got progressively worse over time.
On Thursday, April 23, 2015 at 11:57:16 PM UTC-4, Oliver Volkmann wrote:
Dear Developers,Chris Anderson sent me here to this group to share with you an issue that we feel is worth escalating since we have had similar crashes with 3 Pixhawks so far. Please see the information that I sent to the help department at 3DR, Brandon Basso and Chris Anderson below. The flight logs can be found here: https://drive.google.com/folderview?id=0B62edZ4l5_rOfkxrZlFzM0F1TElWd0xWd1NEVFVycTVNTVBienpqakNDcFVURWhYbzhwNTA&usp=sharingOn March 15th of this year we had a very strange experience where, during an Auto Mission our Pixhawk (FW3.1.5) based SteadiDrone QU4D X started drifting off its flight line increasing in roll angle and speed. We tried to intervene however could not save the vehicle from crashing. We have until now not found out why this happened even with the help from Santiago. I discussed this issue with Andreas Breitenstein (a colleague of mine) who had a similar experience in Namibia on the 13th of March with a completely different drone equipped with a Pixhawk and FW3.1.5. During his auto mission, the drone did a very similar thing where it deviated from the flight plan and inevitably crashed. Yesterday we were testing some of the new features on another drone with a Pixhawk and FW3.2.1 and noticed that as soon as we put this vehicle down and powered it up, the horizon in mission planners HUD would drift in the roll axis constantly. At first I had thought that since I just put this drone together that perhaps the accelerometer calibration was not done properly and so repeated it in the field. We then flew 3 very nice flights in auto and tested some of the features. At the end of the 3rd flight, we landed and immediately noticed on the HUD that the horizon had drifted to about 45 degrees and continued to drift. We decided to see then if the pre-arm checks worked and tried to arm the unit which happened successfully even with the horizon at 45 degrees. Andreas then attempted to take-off to see if it was possible and the unit did fly, albeit, as expected it flew sideways and hit the dirt about 3 feet away.
We then re-started the drone and the horizon went back to normal. I enabled EKF as we have never flown with that and believed it to have far more safety features and that it would produce a far more stable flight. It was quite impressive and I flew the drone around quite a bit in POS-HOLD mode. As we stood there with the drone in POS-HOLD waiting for the battery failsafe to kick in, the drone started rolling to its right and flying away by itself even while I tried to roll left. It continued to fly away at which point I put it in Stabilize to try and prevent it from flying too far away however even Stabilize mode did not seem to help.
We have looked at the log files of all three flights which you will find attached to this email and have discovered that at the point at which each of these 3 flights went bad, there was a deviation between the two IMUs Gyros in either X1 to X2 and Y1 to Y2. We are now very concerned because we have a lot of drones out with our customers who have Pixhawks in them and this issue seems to happen randomly. All three drones (multi-rotors) which had the crashes all had different firmware, were flown in different locations and with different hardware/electronic components. The only thing that they share is that they all had Pixhawks on board and that they all experienced this strange Fly Away behavior which could not be stopped even when switching to stabilize.
Could you please take a look at these logs and let us know what is going on? We are pretty confident that this is not a firmware issue nor a stability algorithm issue as the firmware versions vary and we have had this experience with EKF on as well. We are at a loss as to what to do now other than test each and every Pixhawk that we (and our various clients) have on a crash test drone as this issue happens randomly. Sometimes it happens when it is powered via USB on the desk, sometimes before take-off and sometimes during the flights which result in crashes. We don’t know how many flights to do to replicate the issue but will keep the logs of all of the upcoming tests and send them to you as we have them.
If there are any tests or if there is any other information that you may need such as serial numbers please do not hesitate to let us know. Perhaps these pixhawks are faulty and could be associated with a batch production in which case it may be easier to determine which pixhawks suffer from this strange behavior.
Thank you in advance for your prompt attention to this matter and we look forward to hearing back from you soon.
Regards,
Oliver Volkmann
Micro Aerial Projects L.L.C.
Robert Lefebvre
--
Andy Piper

Oliver Volkmann
Andy Piper
Oliver Volkmann
Andy Piper

{kind=link}
{kind=link}
{kind=link}
George Farris
I'd forgotten you weren't using EKF. FWIW I think EKF now gives a far more robust experience than DCM does in the presence of these types of sensor issue - I definitely recommend you use it, although with that value of kit you probably should wait for 3.3 GA :)
--