MPU6k failure related to main battery voltage going below 11V

Randy Mackay
Another MPU6k failure has appeared on the AC3.3-beta testing thread from a user called Frederic Jean. This user’s MPU6k’s Z-axis accelerometer suddenly develops a 3m/s bias when the main battery voltage drops to below 10.3V. He can easily reproduce the issue and in the logs provided it always happens at the same main battery voltage.
The MPU6k failures are not new - we saw many due to a manufacturing issue of the Pixhawk boards between June 2014 ~ Feb 2015. That manufacturing issue has been fixed and I expect many of the bad boards have been RMA’d but some are still out there.
Anyway, what’s new with this report is the strong correlation with the main battery voltage. Also when I checked another log from earlier this week from another user I see the same correlation with main battery voltage (although it’s at 11V).
-Randy

Tom Pittenger
--
You received this message because you are subscribed to the Google Groups "drones-discuss" group.
To unsubscribe from this group and stop receiving emails from it, send an email to drones-discus...@googlegroups.com.
For more options, visit https://groups.google.com/d/optout.

Robert Lefebvre
Philip Rowse

Jaime Machuca
Philip Rowse
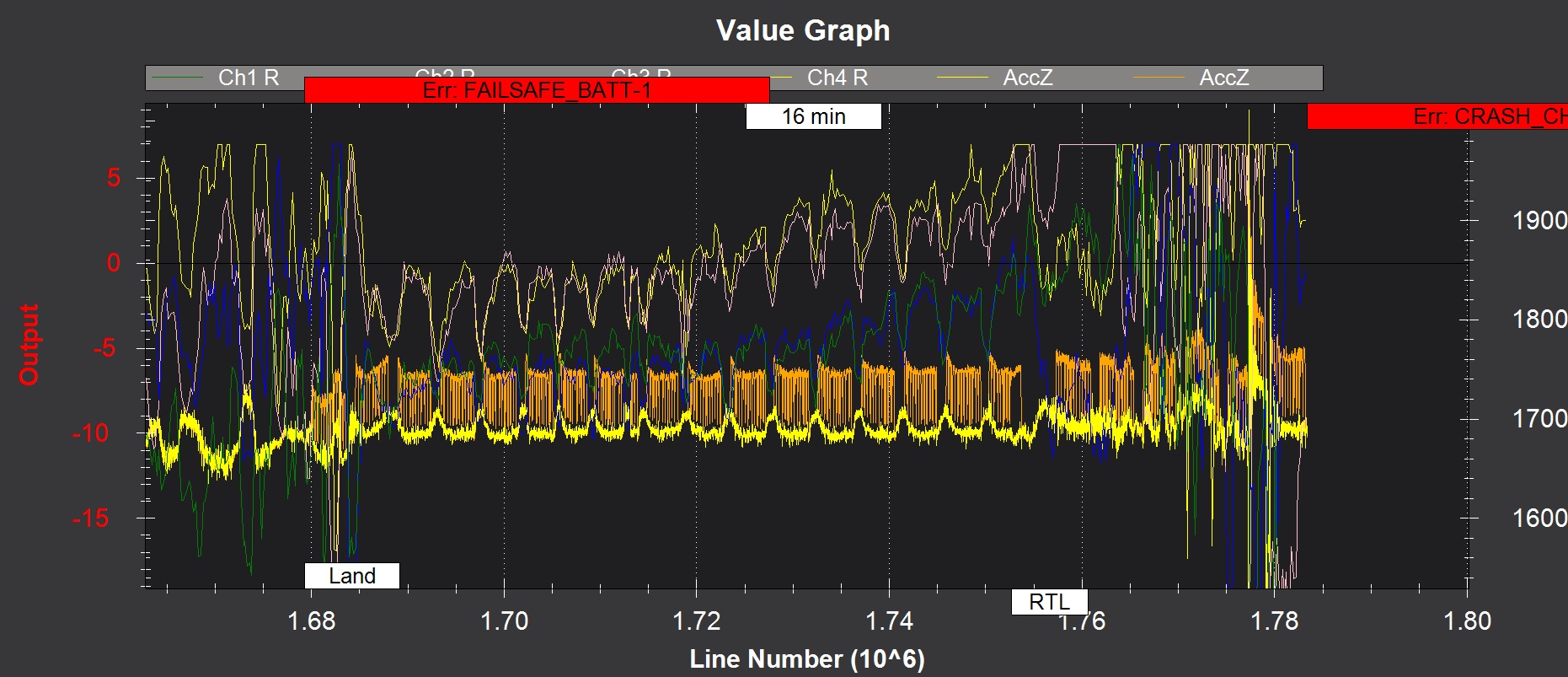
something else is going on here....
It starts as the failsafe engages... but what is the pulsing?

Thorsten
Robert Lefebvre
This somehow reminds me of my buzzer induced magnetic field and vibration problem: https://groups.google.com/forum/#!topic/drones-discuss/7MIpOZJY7SQ
--
Philip Rowse

Jason Short
Randy Mackay
Yes, it must be this! Nicely done Thorsten.
It can’t possibly be a coincidence. That pattern on the z-axis accel looks just like the buzzer sounds. The buzzer is placed directly above the Pixhawk in an IRIS+ (I just checked mine) and there’s not much clearance so a little mass of wires or something moved about could cause them to touch.
I’ve asked the user, Frederic, to disconnect the buzzer and try again.
-Randy
Thorsten


Daniel Frenzel
Thorsten

Jonathan Challinger
My bad, I picked the sound :)
Yes, the accels work fine and AC3.3 as well. It is hardware setup problem which is easy to solve. Anyway, I hope not too many systems are affected since it could easily lead to a crash.
Philip Rowse
Thorsten
My bad, I picked the sound :)
Randy Mackay
This is definitely vibration. One last concern on this is whether this new tone will affect all IRISs or if this was a special case. I can do some tests of invoking the buzzer on my IRIS+ and/or others can see if their IRISs misbehave when the battery alarm goes off.
-Randy
From: drones-...@googlegroups.com [mailto:drones-...@googlegroups.com] On Behalf Of Thorsten
Sent: 13-Jul-15 3:34 PM
To: drones-...@googlegroups.com
--
Philip Rowse
Is it possible to have a tone that runs through the full frequency range while on high rate logging?
Gotta love unintended consequences...