Ardublock + Shield Adafruit

christop...@hotmail.com
j'essaie en vain de faire fonctionner la shield motor dc de chez adafruit avec Ardublock.
La shield est elle compatible avec ardublock ?
Merci

Michaël Clergeot
en regardant rapidement, je ne pense pas que ça fonctionne car il faut la librairie AFMotor.h et il n'y a pas de bloc qui insère cette librairie. Mais tu peux créer ton propre bloc pour cette carte (http://blog.ardublock.com/2012/12/01/how-to-add-new-object-types-by-didier-carne/) et ensuite le proposer à la communauté :o)
Bonne journée et bon hack,
hacking for freedom
--
You received this message because you are subscribed to the Google Groups "ArduBlock" group.
To unsubscribe from this group and stop receiving emails from it, send an email to ardublock+...@googlegroups.com.
For more options, visit https://groups.google.com/groups/opt_out.

alain frenois
La shield est elle compatible avec ardublock

Arduino est un excellent point de départ pour l'électronique, et avec un bouclier moteur, il peut aussi être une plate-forme bien rangé pour la robotique et la mécatronique. Voici une conception pour un bouclier moteur complet qui sera en mesure de pouvoir simplement un grand nombre de projets de complexité moyenne.
- 2 connexions pour servos «passe-temps» 5V connectés à l'Arduino haute résolution minuterie dédiée - pas de gigue!
- Jusqu'à 4 bi-directionnel DC moteurs avec sélection individuelle vitesse de 8 bits (donc environ 0,5% résolution)
- Jusqu'à 2 moteurs pas à pas (unipolaire ou bipolaire) avec une seule bobine, bobine double, entrelacé ou micro-progression.
- 4 H-Bridges: chipset L293D fournit 0,6 A par pont (1,2 A crête) avec protection d'arrêt thermique, de 4,5 V à 25V
- Déroulez résistances au moteur de handicapés au cours de la mise sous tension
- Big borniers facilement brancher les fils (10-22AWG) et de puissance
- Bouton de réinitialisation Arduino élevé haut
- Bornier à 2 broches pour connecter une alimentation externe, pour distinctes logique / moteur fournitures
- Testé compatible avec Mega, Diecimila, et Duemilanove
- Kit complet est disponible à l'achat sur la boutique Adafruit .
- Téléchargez les bibliothèques faciles à utiliser de logiciel Arduino et vous êtes prêt à partir!

Cette photo a des notes. Déplacez votre souris sur la photo pour les voir.
Avant de pouvoir utiliser le bouclier moteur, vous devez installer le AF_Motor Arduino bibliothèque - ceci indique à l'Arduino comment parler au blindage Adafruit moteur, et ce n'est pas une option!
- Tout d'abord, prenez la bibliothèque de github
- Décompressez le fichier ZIP sur votre bureau
- Renommez le dossier décompressé AFMotor
- Assurez-vous que l'intérieur AFMotor est AFMotor.cpp et AFMotor.h fichiers. Sinon, vérifiez les étapes ci-dessus
- Placez le AFMotor dossier dans votre arduinosketchfolder / bibliothèques dossier. Pour Windows, ce sera probablement quelque chose comme Mes Documents / Arduino / bibliothèques pour Mac, il sera quelque chose comme Documents / arduino / bibliothèques . Si c'est la première fois que vous installez une bibliothèque, vous aurez besoin pour créer la bibliothèque dossier. Assurez-vous de l'appeler bibliothèques exactement, pas de bouchons, pas d'autre nom.
- Assurez-vous que l'intérieur de la bibliothèque , il ya le dossier AFMotor dossier, et à l'intérieur AFMotor est AFMotor.cpp AFMotor.h et d'autres fichiers
- Quittez et redémarrez l'IDE. Vous devriez maintenant avoir un sous-menu appelé Fichier-> Exemples-> AFMotor-> MotorParty
Motors ont besoin de beaucoup d'énergie, en particulier moteurs économiques car ils sont moins efficaces. La première chose importante à comprendre ce que la tension du moteur va utiliser. Si vous êtes chanceux, votre moteur est venu avec une sorte de cahier des charges. Certains moteurs de bricolage petits sont uniquement destinées à fonctionner à 1.5V, mais il est tout aussi fréquent d'avoir 6-12V moteurs. Les contrôleurs de moteur sur cet écran sont conçus pour fonctionner à partir de 4,5 V à 25V .
PLUS 1.5-3V MOTEURS NE FONCTIONNE PAS
Les exigences actuelles: La deuxième chose à comprendre, c'est combien de courant de votre moteur aura besoin. Les puces d'attaque de moteur qui viennent avec le kit sont conçus pour fournir jusqu'à 600 mA par moteur, avec 1.2A courant de crête. Notez qu'une fois que vous vous dirigez vers 1A vous aurez probablement envie de mettre un dissipateur sur le pilote de moteur, sinon vous aurez une défaillance thermique, peut-être brûler sur la puce.
Sur l'utilisation du SN754410: Certaines personnes utilisent le SN754410 puce moteur d'entraînement car il est compatible broche à broche, a diodes de sortie et peut fournir 1 A par moteur, 2A crête. Après une lecture attentive de la fiche technique et la discussion avec TI support technique et les ingénieurs électriques, il semble que les diodes de sortie ont été conçus pour la protection ESD seulement et que les utiliser comme rebond de protection est un hack et non garanties de la performance. Pour cette raison, le kit n'est pas livré avec la SN754410 et utilise à la place le L293D avec rebond intégrées de protection des diodes. Si vous êtes prêt à prendre ce risque, et ont besoin de l'currrent supplémentaire, n'hésitez pas à acheter SN754410 et de remplacer les puces fournies.
Besoin d'énergie? Acheter un ensemble de pilotes et de les souder L293D juste au-dessus de ceux de la carte (ferroutage) . Voila, le double de la capacité actuelle! Vous pouvez souder 2 jetons plus sur le dessus avant qu'il ne soit probablement pas pour vous beaucoup d'avantages
Vous ne pouvez pas exécuter moteurs hors d'une pile de 9V il ne faut même pas perdre votre temps / piles! Utilisez un plomb grand ou batterie NiMH. Il est aussi très bien suggéré que vous définissez deux alimentations électriques (alimentation séparée) l'un pour l'Arduino et un pour les moteurs. 99% des «problèmes moteurs bizarres"sont dues à des parasites sur la ligne d'alimentation de partager les alimentations électriques et / ou non ayant une alimentation suffisamment puissante!
Servos sont hors tension de l'5V régulée même que l'Arduino utilise. C'est OK pour les petits servomoteurs suggéré. Si vous voulez quelque chose de plus costaud, couper la piste va + sur les connecteurs de servo et de fil en place votre propre 5-6V offre!
Les moteurs à courant continu sont hors tension d'une «haute tension» et PAS le 5V régulée. Ne branchez pas l'alimentation du moteur pour la ligne 5V . C'est une idée très très très mauvais, sauf si vous êtes sûr que vous savez ce que vous faites!
Il ya deux endroits où vous pouvez obtenir 'alimentation haute tension »de votre moteur de. La première est la prise DC sur la carte Arduino et l'autre est le bloc 2-terminal sur le bouclier qui est étiqueté EXT_PWR . Le Jack DC sur l'Arduino est une diode de protection afin de ne pas être en mesure de salir des choses trop mal si vous branchez le mauvais type de pouvoir. Toutefois, les terminaux EXT_PWR sur le bouclier n'ont pas de diode de protection (pour une raison assez bonne). Soyez absolument veiller à ne pas le brancher à l'envers ou vous allez détruire le bouclier du moteur et / ou votre Arduino!
Voici comment cela fonctionne:

Si vous souhaitez avoir un seul bloc d'alimentation DC pour l'Arduino et des moteurs , il suffit de le brancher sur la prise DC sur l'Arduino ou le bloc PWR_EXT 2-pin sur le bouclier. Placez le cavalier d'alimentation sur le flasque du moteur.
Si vous avez un Arduino Diecimila, réglez le cavalier Arduino source d'énergie pour EXT.
Notez que vous pouvez avoir des problèmes avec Arduino réinitialise si l'alimentation de la batterie n'est pas en mesure de fournir une puissance constante, et il n'est pas un moyen suggéré d'alimenter votre projet moteur
Si vous souhaitez avoir le Arduino hors tension de l'USB et le moteur hors tension d'une alimentation DC , branchez le câble USB. Ensuite, connectez l'alimentation du moteur au bloc PWR_EXT sur le bouclier. Ne pas placer le cavalier sur le bouclier. Il s'agit d'une méthode suggérée pour l'alimentation de votre projet de moteur
(Si vous avez un Arduino Diecimila, ne pas oublier de mettre le cavalier d'alimentation Arduino USB Si vous avez un Diecimila, vous pouvez alternativement faire ce qui suit:. branchez l'alimentation CC dans l'Arduino, et placez le cavalier sur le flasque du moteur.)
Si vous souhaitez avoir 2 séparés alimentations en courant continu pour l'Arduino et des moteurs . Branchez l'alimentation de l'Arduino dans la prise DC et branchez l'alimentation du moteur au bloc PWR_EXT. Assurez-vous que le cavalier est retiré de la flasque du moteur.
Si vous avez un Arduino Diecimila, réglez le cavalier Arduino pour EXT. Il s'agit d'une méthode suggérée pour l'alimentation de votre projet de moteur
De toute façon, si vous souhaitez utiliser le moteur à courant continu / pas à pas du système de protection du moteur LED doit être allumée indiquant la puissance du moteur bonne
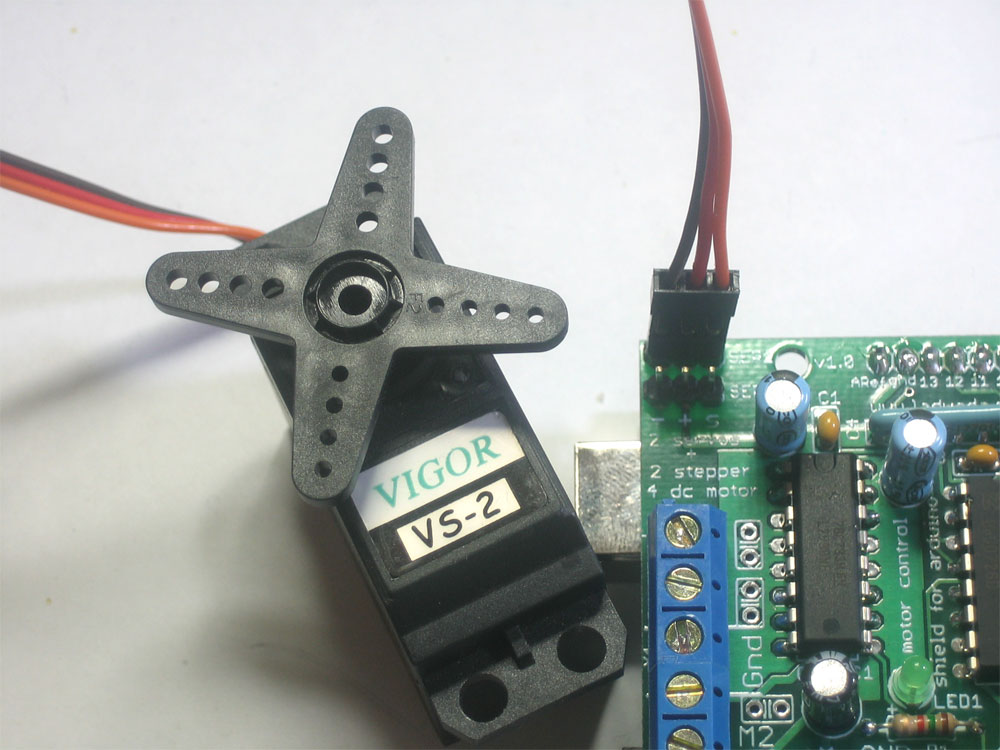
Des servomoteurs
Servomoteurs sont le moyen le plus facile pour y aller avec le contrôle moteur. Ils ont un 3-broches 0,1 "connexion connecteur femelle avec +5 V, masse et les entrées de signaux. Le bouclier du moteur apporte simplement les lignes de sortie PWM 16 bits à 2 à 3 broches têtes de sorte que son facile à brancher et c'est parti. Ils peuvent prendre beaucoup de puissance si une pile 9V ne durera pas plus de quelques minutes!
La bonne chose sur l'utilisation du PWM à bord est que son très précis et mène ses affaires dans le fond. Vous pouvez utiliser le haut dans la bibliothèque Servo
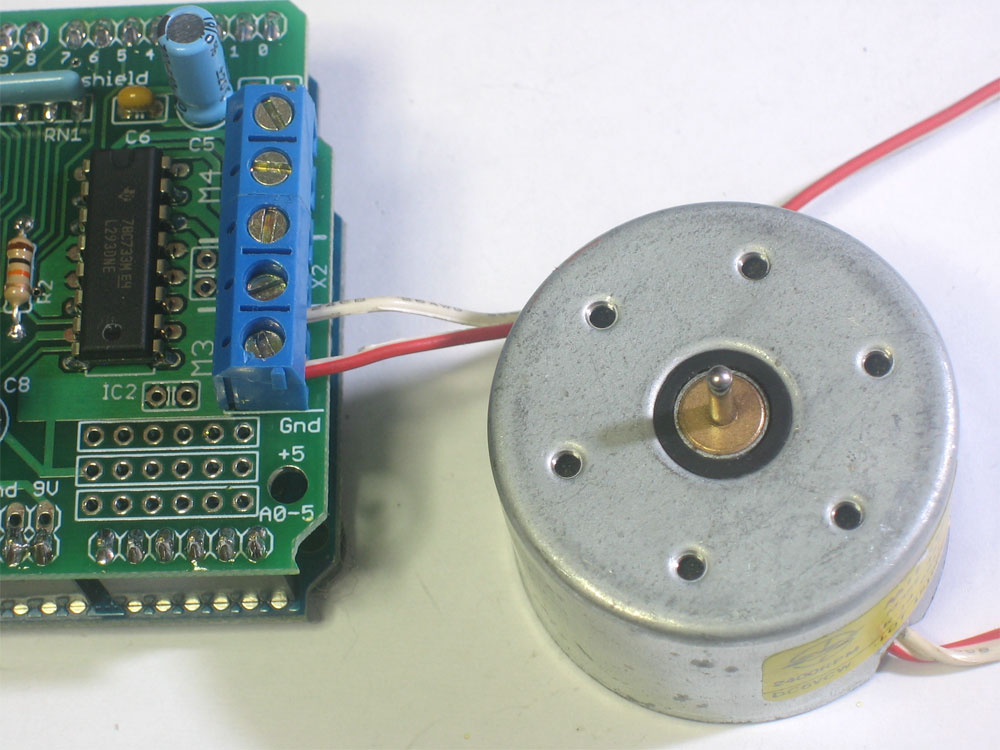
Moteur à courant continu
Moteurs à courant continu sont utilisés pour toutes sortes de projets de robotique. Le bouclier du moteur peut piloter jusqu'à 4 moteurs à courant continu bidirectionnel. Cela signifie qu'ils peuvent être entraîné vers l'avant et vers l'arrière. La vitesse peut également être modifiée par incréments de 0,5% à l'aide de la grande qualité construit en PWM.Cela signifie que la vitesse est très lisse et ne variera pas!
Notez que la puce pont en H n'est pas vraiment conçu pour piloter des charges de plus de 0,6 A ou 1,2 A qui pointe sur si ce n'est pour les petits moteurs. Vérifiez la fiche technique pour des informations sur le moteur pour vérifier son OK.
Pour connecter un moteur, tout simplement souder deux fils aux bornes puis connectez soit à la M1, M2, M3, ou M4 . Ensuite, suivez ces étapes dans votre croquis
- Assurez-vous d'inclure <AFMotor.h>
- Créer l'objet AF_DCMotor avec AF_DCMotor ( moteur #, fréquence ) , pour configurer le moteur à pont en H et les verrous. Le constructeur prend deux arguments.
Le premier est le port auquel le moteur est connecté à, 1, 2, 3 ou 4 . fréquence est la vitesse à laquelle le contrôle de la vitesse du signal. Pour les moteurs 1 et 2, vous pouvez choisir MOTOR12_64KHZ , MOTOR12_8KHZ , MOTOR12_2KHZ , ou MOTOR12_1KHZ . A grande vitesse, comme 64KHz ne sera pas audible mais une faible vitesse comme 1KHz va utiliser moins d'énergie. Moteurs 3 et 4 ne sont possibles que pour fonctionner à 1KHz et ignore tout contexte donné
- Ensuite, vous pouvez régler la vitesse du moteur à l'aide SetSpeed ( vitesse ) où la vitesse varie de 0 (arrêt) à 255 (vitesse maximale). Vous pouvez régler la vitesse quand vous le souhaitez.
- Pour faire tourner le moteur, appeler run ( direction ) où la direction est AVANT , ARRIERE ou RELEASE . Bien sûr, l'Arduino ne savons pas vraiment si le moteur est «en avant» ou «arrière», donc si vous voulez changer sa façon de penser qui est en avant, il suffit de permuter les deux fils du moteur vers le bouclier.
# Include <AFMotor.h> AF_DCMotor moteur (2, MOTOR12_64KHZ); / / Création du moteur n ° 2 , 64KHz pwm vide configuration () { Serial.begin (9600); / / Mise en place de bibliothèque série à 9600 bps Serial.println ( "test du moteur!" ); motor.setSpeed (200); / / régler la vitesse de 200/255 } vide en boucle () { Serial.print ( "tick" ); motor.run (FORWARD); / / le mettre en marche l'avenir retard (1000); Serial.print ( "tac" ); motor.run (ARRIÈRE); / / l'autre retard (1000); Serial.print ( "tack" ); motor.run (COMMUNIQUÉ); / / arrêté retard (1000); }
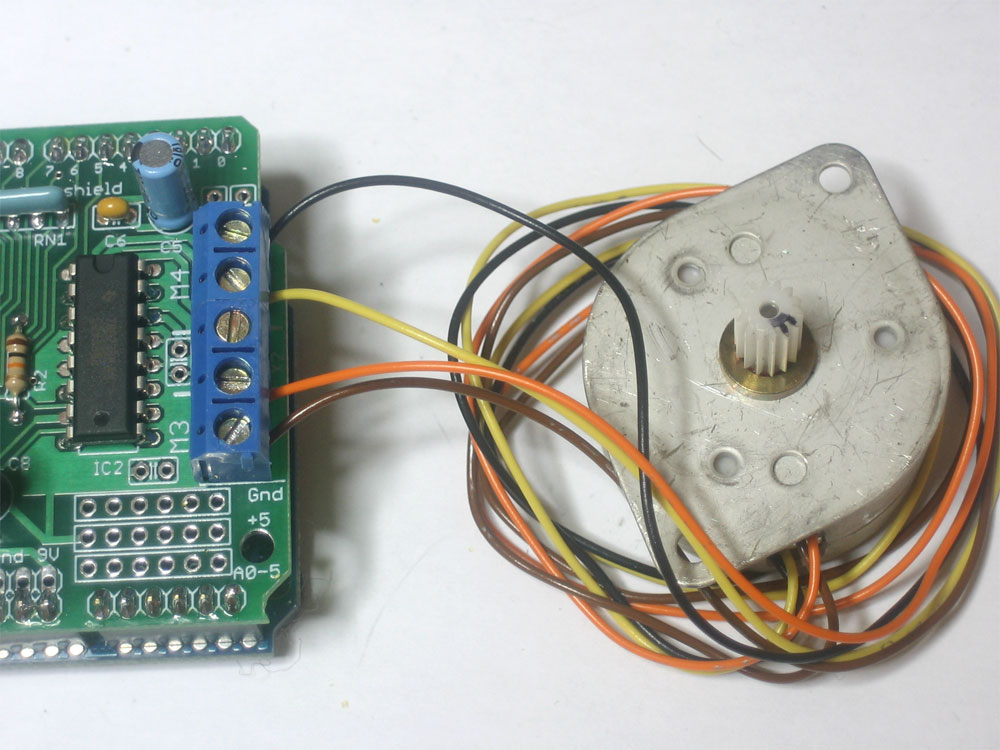
Un bi-polaire moteur pas à pas - 4 fils
Moteurs pas à pas sont parfaits pour les (semi-) un contrôle précis, parfait pour les robots de nombreux projets de CNC. Ce bouclier moteur prend en charge jusqu'à 2 moteurs pas à pas. La bibliothèque fonctionne de manière identique pour le bi-polaire et uni-polaire moteurs
Pour les moteurs unipolaires: pour connecter le pas à pas, la première figure sur quelles broches relié à laquelle bobine, et qui goupilles sont les prises centrales. Si c'est un moteur à 5 fils alors il y aura 1 qui est la prise médiane pour les deux bobines. Theres beaucoup de tutoriels en ligne sur la façon de désosser le brochage bobines . Les prises médianes doivent tous deux être connectés ensemble à la borne GND sur le bloc moteur de sortie de blindage. puis bobine 1 doit se connecter à un moteur ports (par exemple M1 ou M3) et la bobine 2 doit se connecter à un autre port du moteur (M2 ou M4).
Pour les moteurs bipolaires: c'est juste comme des moteurs unipolaires, sauf theres aucun fil 5e à relier à la terre. Le code est exactement le même.
Exécution d'un stepper est un peu plus compliqué que de courir un moteur à courant continu, mais sa reste très facile
- Assurez-vous d'inclure <AFMotor.h>
- Créer l'objet moteur pas à pas avec AF_Stepper ( étapes , pas à pas # ) pour installer le moteur à pont en H et verrouille. Etape s indique le nombre de pas par tour du moteur a. un moteur 7.5degree/step a 360/7.5 = 48 mesures. Stepper # est le port qui lui est connecté. Si vous utilisez M1 et M2, son port 1. Si vous utilisez M3 et M4 son port 2
- Régler la vitesse du moteur à l'aide SetSpeed ( rpm ) où tr est le nombre de tours par minute que vous voulez le stepper à tourner.
- Ensuite, chaque fois que vous voulez que le moteur se déplacer, appelez le pas ( # étapes , direction , StepType ) procédure. # étapes est le nombre de pas que vous voudriez qu'il prendra . direction est soit AVANT ou ARRIERE et le type d'étape est UNIQUE, DOUBLE. INTERCALEE ou MICROSTEP .
"Simple" signifie simple bobinage activation, "double" signifie 2 bobines sont activées à la fois (pour un couple plus élevé) et "interleave" signifie qu'il alterne entre simple et double pour obtenir une résolution deux fois (mais bien sûr son la moitié de la vitesse). "Microstepping" est une méthode où les bobines sont PWM'd pour créer le mouvement sans heurt entre les étapes. Theres tonnes de renseignements sur les avantages et les inconvénients de ces différentes méthodes pas à pas dans la page des ressources.
Vous pouvez utiliser n'importe quelle méthode pas à pas que vous voulez, de la modifier "à la volée" comme vous pouvez minimum de puissance, plus de couple, ou plus de précision. - Par défaut, le moteur «tenir» la position après son renforcement fait. Si vous souhaitez libérer toutes les bobines, de sorte qu'il peut tourner librement, appeler release ()
- Les commandes pas à pas sont «blocage» et sera de retour une fois que les mesures ont terminé. Si quelqu'un veut être génial et écrire une version de la bibliothèque qui ne marchepied arrière-plan qui serait cool! :)
# Include <AFMotor.h>
AF_Stepper moteur (48, 2);
void setup () {
Serial.begin (9600); / / Mise en place de bibliothèque série à 9600 bps
Serial.println ("test pas à pas!");
motor.setSpeed (10); / / 10 min
motor.step (100, FORWARD, SEUL);
motor.release ();
retard (1000);
}
void loop () {
motor.step (100, FORWARD, SEUL);
motor.step (100, ARRIÈRE, SEUL);
motor.step (100, FORWARD, DOUBLE);
motor.step (100, ARRIERE DOUBLE);
motor.step (100, FORWARD, INTERCALEE);
motor.step (100, ARRIÈRE, INTERCALEE);
motor.step (100, FORWARD, MICROSTEP);
motor.step (100, ARRIÈRE, MICROSTEP);
}
Si vous voulez deux moteurs pas à pas à l'étape à la fois, vous aurez besoin d'écrire quelque chose comme ceci:
doublestep vide (étapes int, int, le style de direction int) {
while (étapes -) {
motor1.step (1, direction, style);
motor2.step (1, direction, style);
}
}
- Arduino pas à pas / servo bibliothèque logicielle avec micropas soutien .
Pour l'installer, cliquez sur Téléchargements dans le milieu de la page, sélectionnez Télécharger au format Zip et décompressez le dossier.
Renommez le dossier AFmotor (vérifier que le dossier renommé contient le cpp. et. h fichiers) et d'installer dans les bibliothèques Arduinosketches / dossier. Pour savoir comment utiliser et à installer les bibliothèques, voir notre tutoriel! Cette version fonctionne maintenant avec le Mega. Domaine public! - Bibliothèque AccelStepper avec le soutien AFMotor. Cette bibliothèque permet avancée pas à pas de contrôle, y compris accelleration et decelleration, et concurrente de commande pas à pas! Vous devez toujours AFmotor ci-dessus!
Pour l'installer, cliquez sur Télécharger dans le milieu de la page, sélectionnez Télécharger en zip et décompressez le dossier.
Renommez le dossier AccelStepper (vérifier que le dossier renommé contient le cpp. et les fichiers. h) et installer dans les bibliothèques Arduinosketches / dossier. Pour savoir comment utiliser et à installer les bibliothèques, voir notre tutoriel!
Le logiciel ArduBlock est un plugin qui s’ajoute à l’IDE d'Arduino et qui vous permet de programmer en blocs de fonctions (un peu comme scracth4arduino ou appinventor pour android).
Il est dévellopé par David Li et HE Qichen sous licence GNU GPL v3.
L'intérêt d’ArduBlock est qu’il vous génère les lignes de codes … la platine Arduino devient donc tout de suite encore plus simple à utiliser !
Il est actuellement disponible en 8 langues, totalement traduit en français, japonnais, espagnole, et portugais brésilien (le logiciel est de base en anglais, Yes sir !).
Et en plus il intègre pour l'instant les modules TinkerKit, DFRobot et Seeedstudio grove.
Ca donne ça :

Pour l’installer c’est très simple !
1 – Repérez votre dossier sketchbook en démarrant l’IDE Arduino et en vous rendant dans les paramètres de l’IDE (dans « File » puis « Preferences »).
2 – Téléchargez ardublock ici : https://github.com/taweili/ardublock/downloads
3 – Rendez-vous dans le répertoire de votre scketchbook et créez cette arborescence :
[chemin de votre sketchbook]/tools/ArduBlockTool/tool/
4 – Copiez simplement ardublock-all.jar à l’intérieur du répertoire créé.
5 – Redémarrez l’IDE Arduino et commencez à créer votre premier sketch en blocs en vous rendant dans le menu Tools>Ardublock !
6 – Une fois vos blocs assemblés (n’oubliez pas de commencer par une boucle), cliquez sur Upload et hop ! le code est construit dans votre IDE et transféré dans la platine Arduino… magique non ?
Plus d'infos et d'exemples en français sur mon blog et en anglais sur le blog d'ArduBlock et surtout ici : http://blog.ardublock.com/category/community/
| |||||
1 chemain de darnauran
33480 castelnau de médoc
tel 0556581806
http://frenois.com
christop...@hotmail.com
Il faut que je crée un bloc ?
C'est à dire que je dois faire un bloc comme ceux sur la gauche de couleur ?
Michaël Clergeot
Je n'ai pas tout compris.
Il faut que je crée un bloc ?
C'est à dire que je dois faire un bloc comme ceux sur la gauche de couleur ?
O.-Michaël Clergeot-.O
hacking for freedom
christop...@hotmail.com
Mais je n'y connais rien en construction de block.
Ca va pas être facile
Michaël Clergeot
courage !
hacking for freedom
Mais je n'y connais rien en construction de block.
Ca va pas être facile
--

jeandaniel planterose
christop...@hotmail.com
Il fonctionne très bien avec Squeakbot. Mais il est impossible de faire des delais avec squeak.
J'aimerai pouvoir le faire faire à des enfants. voilà pourquoi je cherche une solution sous forme de bloc ou autre.
jeandaniel planterose
Merci de vos aides.
Il fonctionne très bien avec Squeakbot. Mais il est impossible de faire des delais avec squeak.
J'aimerai pouvoir le faire faire à des enfants. voilà pourquoi je cherche une solution sous forme de bloc ou autre.
Michaël Clergeot
http://www.dfrobot.com/index.php?route=product/product&filter_name=motor&product_id=59
ou
https://www.sparkfun.com/products/9896
pour chaque moteur tu as une sortie numérique pour le sens et une sortie analogique (pwm) pour la vitesse, c'est royal !
hacking for freedom
Pour utiliser des moteurs et des cartes de puissance, Minibloq est compatible avec des modules pour moteurs CC "à-pas-cher" et largement utilisable avec des élèves.