A quick question

Yongwen Wu
Yongwen Wu
It is running as I changed "g = GEKKO(remote=False)", seems the remote server is down or something. The issue is after I changed, it is using "APOPT" rather than "OPOPT", and basically it doesn't work properly I assume that not a good start point is given.

John Hedengren
Dear Yongwen,
Here are a couple things to try:
Set a non-zero default for C1 – C4 and set a lower bound (such as 1e-5).
Before
C1=g.FV()
C2=g.FV()
C3=g.FV()
C4=g.FV()
After
C1,C2,C3,C4 = m.Array(g.FV,4,value=0.1,lb=1e-5)
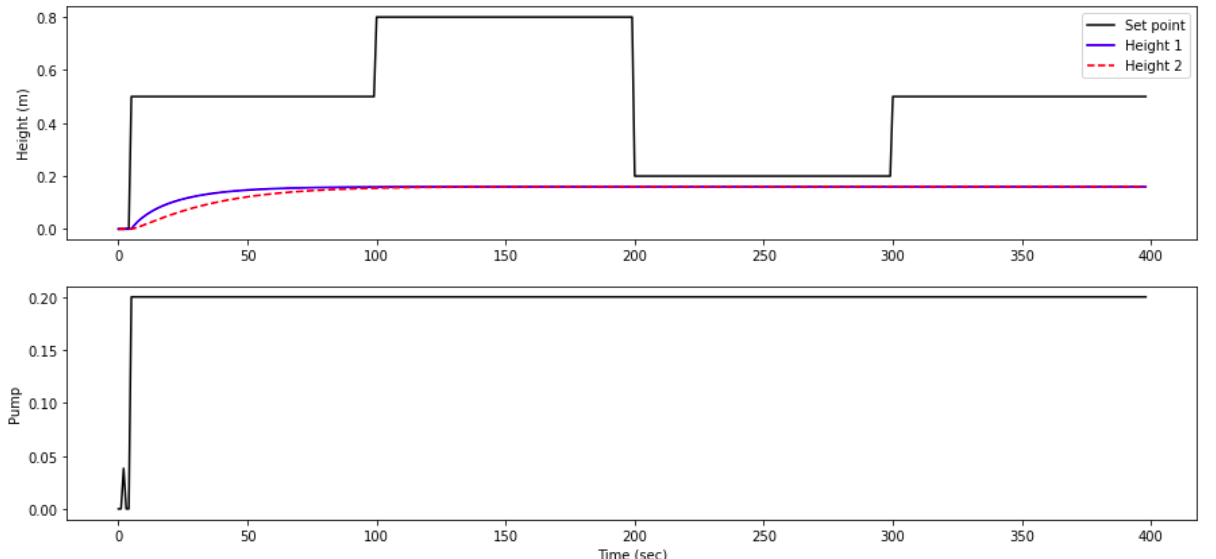
Also, starting with a non-zero h1 and h2 can help because they start right at a point that is almost undefined with sqrt(h1) and sqrt(h2) if the solver tries negative values. Another way to deal with this is to transform the equations to remove sqrt by taking the square of both sides. That strategy is used successfully in the reservoir simulation exercise:
m.Equations([Vout[i]**2 == c[i]**2 * h[i] for i in range(4)])
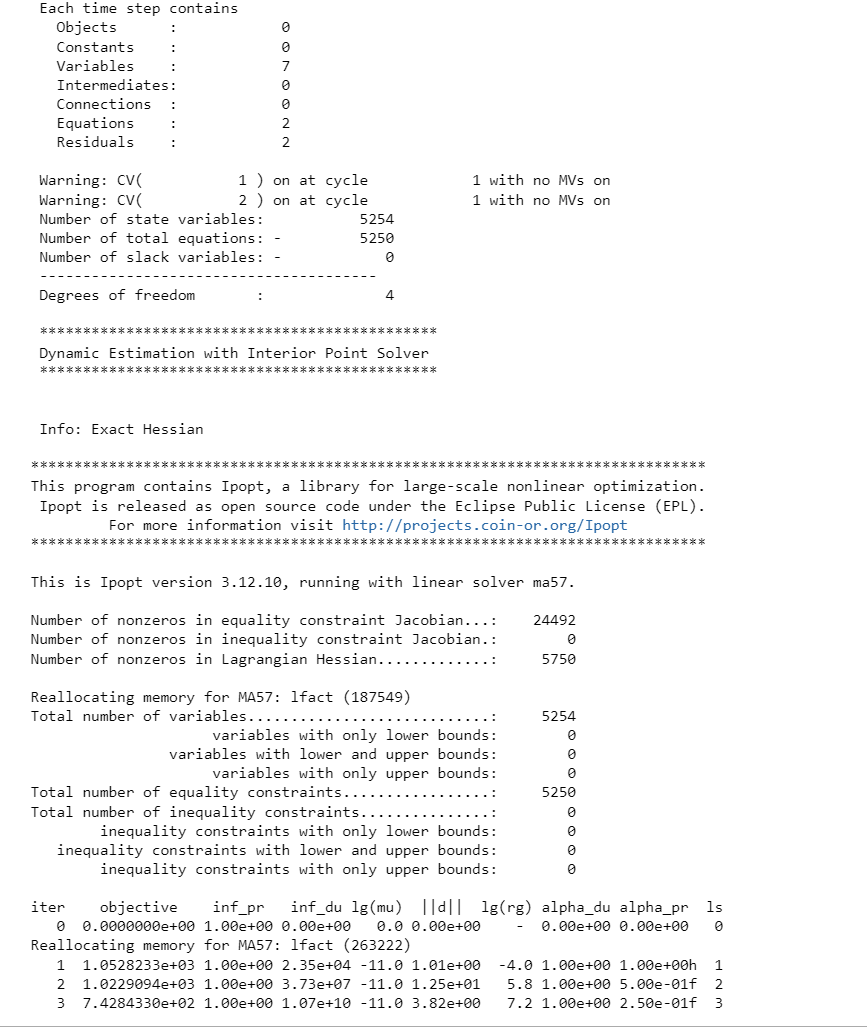
Let us know if you need any additional support. The public server is working but it has different solver options than local solve methods. You may be getting better performance with IPOPT (and linear solver MUMPS) for the local solve versus IPOPT (with linear solver ma57) for the public server. There are license restrictions for distributing the Harwell Subroutine Libraries.
-John Hedengren
From: apmo...@googlegroups.com <apmo...@googlegroups.com>
On Behalf Of Yongwen Wu
Sent: Wednesday, October 6, 2021 8:32 AM
To: apmonitor <apmo...@googlegroups.com>
Subject: [APM] Re: A quick question
It is running as I changed "g = GEKKO(remote=False)", seems the remote server is down or something. The issue is after I changed, it is using "APOPT" rather than "OPOPT", and basically it doesn't work properly I assume that not a good start point is given.
But I didn't figure out why IPOPT is not applicable?
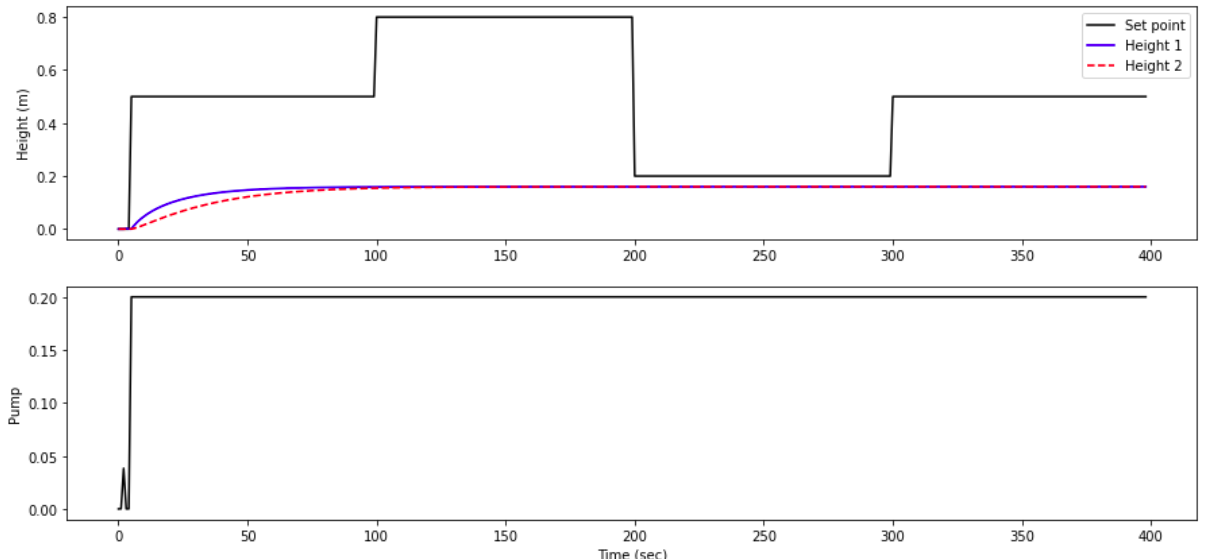
and Also, I tried to use MPC to do the control for this same problem, as the provided code. Since the first tank is easily full as the pump sees a big increase in a short time, so I tried to apply DMAX setting on its MV (p variable originally), but it seems the upper bound of pump is set not the maximum delta MV in a single time step.
I only add in the original python code:
p.DMAX=0.2
Any ideal?
Thanks
Anyone has any idea about this?
I suppose it supports nonlinear term in the equations as Ipopt is a nonlinear solver, but a little bit confused that "running with linear solver ma57".
Thanks for any help.
Yongwen
--
--
APMonitor user's group e-mail list.
- To post a message, send email to apmo...@googlegroups.com
- To unsubscribe, send email to
apmonitor+...@googlegroups.com
- Visit this group at http://groups.google.com/group/apmonitor
---
You received this message because you are subscribed to the Google Groups "apmonitor" group.
To unsubscribe from this group and stop receiving emails from it, send an email to
apmonitor+...@googlegroups.com.
To view this discussion on the web visit
https://groups.google.com/d/msgid/apmonitor/d8a62d25-d9fd-4c11-a6c1-b37303e04c81n%40googlegroups.com.