OP Oscillating?
16 views
Skip to first unread message

ayub.i....@gmail.com
Jun 15, 2021, 6:34:41 PM6/15/21
to apmonitor
Hi,
Hopefully this is the right place to ask this question.
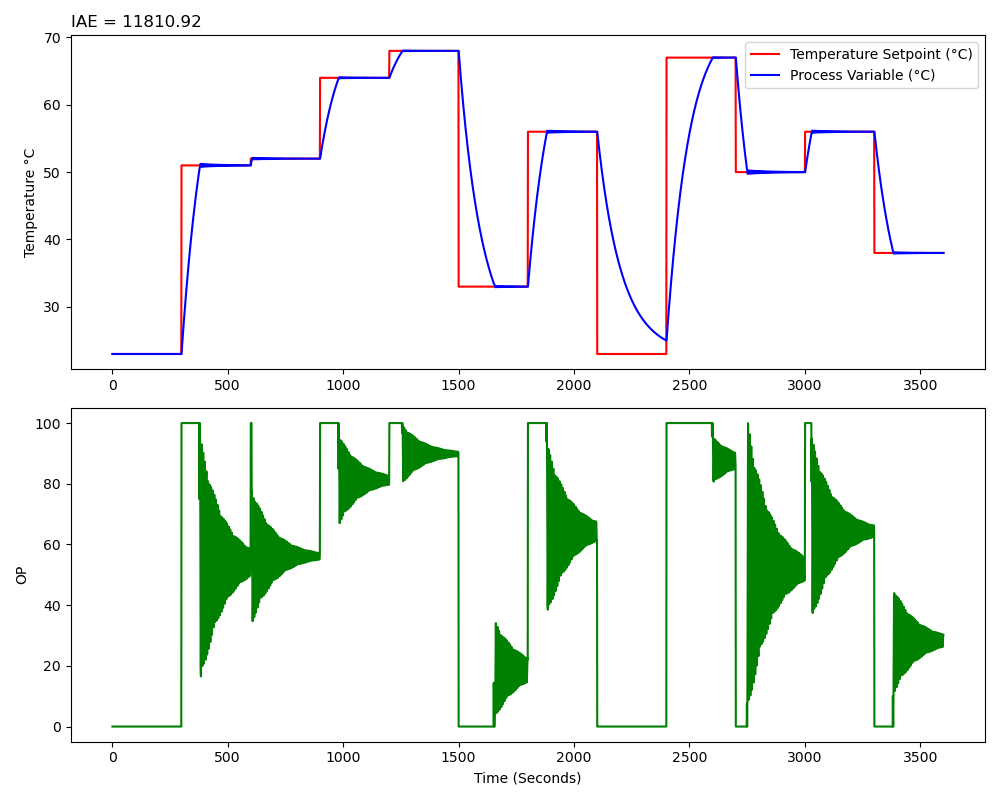
I was wondering if it is usually normal for the OP to oscillate? Please see the figure below. This is through a simulation, and I been following the PI Controller information on apmonitor.com. Any advice that would help me decrease the oscillation would be much appreciated.
Thanks,

John Hedengren
Jun 15, 2021, 6:59:11 PM6/15/21
to apmo...@googlegroups.com
Great question Ayub. There is a tradeoff between performance and controller aggressiveness. That response wouldn't be good if the actuator could wear out from overuse such as a valve. Here is an example of improving PID performance with modeling and optimization:
https://youtu.be/0LiNb_MEXmQ
Moura Oliveira, P.B., Hedengren, J.D., Pires, E.J.S., Swarm-Based design of Proportional Integral and Derivative Controllers using a Compromise Cost Function: An Arduino Temperature Laboratory Case Study, Special Issue: Algorithms for PID Controller, Algorithms,
13(12), 315, DOI: 10.3390/a13120315, 2020. Article
Taysom, S., Hedengren, J.D., Sorensen, C., A Comparison of Model Predictive Control and PID Temperature Control in Friction Stir Welding, Journal of Manufacturing Processes, 29, pp. 232-241, 2017, doi: 10.1016/j.jmapro.2017.07.015. Article
Park, J., Patterson, C., Kelly, J., Hedengren, J.D., Closed-Loop PID Re-Tuning in a Digital Twin By Re-Playing Past Setpoint and Load Disturbance Data, AIChE Spring Meeting, New Orleans, LA, April 2019. Abstract
Many other researchers and practitioners have come up with suggestions for tuning PID controllers. There are ITAE and IMC approaches in the control course: https://apmonitor.com/pdc
John Hedengren
Associate Professor
Department of Chemical Engineering
Brigham Young University
BYU PRISM https://apm.byu.edu
From: apmo...@googlegroups.com <apmo...@googlegroups.com> on behalf of ayub.i....@gmail.com <ayub.i....@gmail.com>
Sent: Tuesday, June 15, 2021 9:44:01 AM
To: apmonitor <apmo...@googlegroups.com>
Subject: [APM] OP Oscillating?
Sent: Tuesday, June 15, 2021 9:44:01 AM
To: apmonitor <apmo...@googlegroups.com>
Subject: [APM] OP Oscillating?
--
--
APMonitor user's group e-mail list.
- To post a message, send email to apmo...@googlegroups.com
- To unsubscribe, send email to apmonitor+...@googlegroups.com
- Visit this group at http://groups.google.com/group/apmonitor
---
You received this message because you are subscribed to the Google Groups "apmonitor" group.
To unsubscribe from this group and stop receiving emails from it, send an email to apmonitor+...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/apmonitor/b7094e70-d954-4b6e-9d93-50e191597cf1n%40googlegroups.com.
--
APMonitor user's group e-mail list.
- To post a message, send email to apmo...@googlegroups.com
- To unsubscribe, send email to apmonitor+...@googlegroups.com
- Visit this group at http://groups.google.com/group/apmonitor
---
You received this message because you are subscribed to the Google Groups "apmonitor" group.
To unsubscribe from this group and stop receiving emails from it, send an email to apmonitor+...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/apmonitor/b7094e70-d954-4b6e-9d93-50e191597cf1n%40googlegroups.com.
Ayub Lakhani
Jun 15, 2021, 8:34:36 PM6/15/21
to apmo...@googlegroups.com
Hi Dr. Hedengren,
Thanks for the resources, but I am still a little confused. I am simulating one heater as mentioned here, where I used the simplified IMC tuning method (deadtime = 0) as mentioned here. I figured using the moderate tuning method would minimize the oscillation, unless it is okay that the actuator (the heater) oscillates? Maybe I can try a more conservative tuning or try ITAE tuning to see if that is a better option than the moderate IMC tuning?
Ayub Lakhani
To view this discussion on the web visit https://groups.google.com/d/msgid/apmonitor/BYAPR08MB4600FFA32F9FBB46E66F6C0CEE309%40BYAPR08MB4600.namprd08.prod.outlook.com.

John Hedengren
Jun 15, 2021, 8:36:20 PM6/15/21
to APM Google Groups
Ayub,
Try using a derivative filter or else no derivative term (D=0) as with a PI controller: https://apmonitor.com/pdc/index.php/Main/ProportionalIntegralControl The derivative term can amplify measurement noise and it can create a chattering OP.
-John Hedengren
To view this discussion on the web visit https://groups.google.com/d/msgid/apmonitor/CAG%2B7%2BxZETSe6GNaz_k2OWKR0fnd6GkqgOSFBj6LvRp-TA%3DNs6g%40mail.gmail.com.
--
Reply all
Reply to author
Forward
0 new messages