dems on plain terrains
28 views
Skip to first unread message

Mauro S
Aug 30, 2022, 8:24:51 AM8/30/22
to Ames Stereo Pipeline Support
Hi!
Here I share a result from a CTX image of a relative plain/smooth terrain.
This result is using nonprojected BA images with this stereo default:
# > stereo_tri --bundle-adjust-prefix bactx/BA --subpix-from-blend --skip-point-cloud-center-comp --corr-seed-mode 1 --stereo-file ./stereo.default --sgm-collar-size 0 --threads 1 --trans-crop-win 1024 0 1024 1024 G19crop.cub J03crop.cub DEMLR/LR-1024_0_1024_1024/1024_0_1024_1024
alignment-method local_epipolar
# Intensity Normalization
force-use-entire-range # Use entire input range
datum D_MARS
prefilter-mode 2
prefilter-kernel-width 1.4
stereo-algorithm 1
corr-memory-limit-mb 15000
processes 2
cost-mode 2
corr-kernel 35 35
subpixel-mode 2
subpixel-kernel 35 35
filter-mode 1
rm-half-kernel 5 5
max-mean-diff 3
rm-min-matches 60
rm-threshold 3
rm-cleanup-passes 1
near-universe-radius 0.0
far-universe-radius 0.0
This result is using nonprojected BA images with this stereo default:
# > stereo_tri --bundle-adjust-prefix bactx/BA --subpix-from-blend --skip-point-cloud-center-comp --corr-seed-mode 1 --stereo-file ./stereo.default --sgm-collar-size 0 --threads 1 --trans-crop-win 1024 0 1024 1024 G19crop.cub J03crop.cub DEMLR/LR-1024_0_1024_1024/1024_0_1024_1024
alignment-method local_epipolar
# Intensity Normalization
force-use-entire-range # Use entire input range
datum D_MARS
prefilter-mode 2
prefilter-kernel-width 1.4
stereo-algorithm 1
corr-memory-limit-mb 15000
processes 2
cost-mode 2
corr-kernel 35 35
subpixel-mode 2
subpixel-kernel 35 35
filter-mode 1
rm-half-kernel 5 5
max-mean-diff 3
rm-min-matches 60
rm-threshold 3
rm-cleanup-passes 1
near-universe-radius 0.0
far-universe-radius 0.0
Any suggestion on how to improve the result (I know I showld try the mgm algorithm, but base on thir result I do not know it will improve that much)
Also what could be the cause of those "horizontal" stripes?
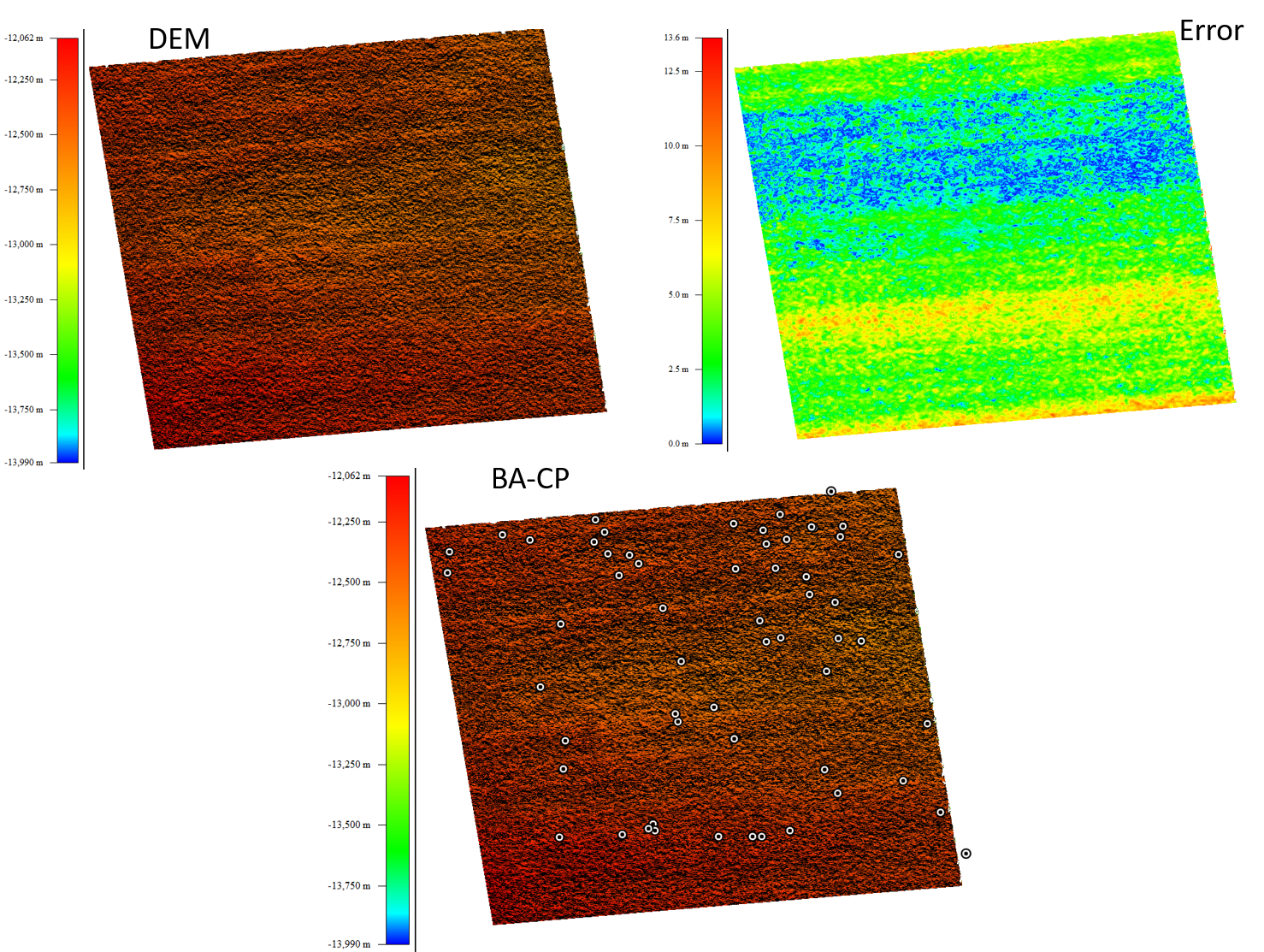
Also what could be the cause of those "horizontal" stripes?

Oleg Alexandrov
Aug 30, 2022, 11:43:53 AM8/30/22
to Mauro S, Ames Stereo Pipeline Support
You are using --subpixel-mode 2, which is the best we've got. If you are adventurous, you can also try to see what the external algorithms are returning. For example, you could use --stereo-algorithm opencv_sgbm with --alignment-method local_epipolar and no subpixel mode at all. (See full list at https://stereopipeline.readthedocs.io/en/latest/stereo_algorithms.html).
When it comes to the artifacts though, if your "error" is the IntersectionError returned by point2dem --errorimage, I am quite sure it is because of camera jitter. The CTX camera is a line scan sensor, it acquires lines as it moves. If it wiggles a little along the way, the pattern created by each line changes. You can verify that by checking if the lines above are along actual image lines (image rows) rather than perpendicular to it.
Such a pattern may be harmless if it does not result in big change in DEM heights.
If you have more than one set of images over that area, you can try to bundle-adjust them together, then get separate DEMs and separate IntersectionError images, and compare the DEM heights and pattern in that error. Maybe the result is acceptable.
--
You received this message because you are subscribed to the Google Groups "Ames Stereo Pipeline Support" group.
To unsubscribe from this group and stop receiving emails from it, send an email to ames-stereo-pipeline...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/ames-stereo-pipeline-support/70e40795-d5c2-47cf-be74-436e60f2b130n%40googlegroups.com.
Mauro S
Aug 30, 2022, 11:56:48 AM8/30/22
to Ames Stereo Pipeline Support
Thanks Oleg,
This is the ORI so despite it is a relative low relief area I was expecting to resolve more features as seen in the image
I will try what you suggested, also maybe mapproject now to this DEM and re run the parallel stero?
![Alexandrov, Oleg (ARC-TI)[KBR Wyle Services, LLC]'s profile photo](http://lh3.googleusercontent.com/a-/ALV-UjVGukhtKFgQS_9MOcmN5PVOvDbkaQxhwU5C3rzD5Hsp_7wxXA=s40-c)
Alexandrov, Oleg (ARC-TI)[KBR Wyle Services, LLC]
Aug 30, 2022, 12:08:52 PM8/30/22
to Mauro S, Ames Stereo Pipeline Support
You can try mapprojecting and redoing stereo, but that is most useful when the terrain is steep and the images are so different that correlation fails. Then mapprojection makes them more similar.
In your case the terrain is flat already, so I don't know if maprojection can improve things much.
>This
is the ORI so despite it is a relative low relief area I was expecting to resolve more features as seen in the image
It
depends. Stereo is meant to find terrain. If your terrain is flat, it does not matter as much what the pattern on the ground is, as long as it is varied enough to help with correlation.
If you are saying that the terrain has minor height variations and those are not captured, then not sure. Try
the asp_mgm algorithm with the default value for correlation kernel size, which is I think 7, maybe it will resolve things better.
If you have HiRISE data for that area, that being much higher resolution may work better. Or in either case you
can try a different CTX dataset to at least see what changes.
From: ames-stereo-pi...@googlegroups.com <ames-stereo-pi...@googlegroups.com> on behalf of Mauro S <mgs...@gmail.com>
Sent: Tuesday, August 30, 2022 8:56 AM
To: Ames Stereo Pipeline Support <ames-stereo-pi...@googlegroups.com>
Subject: [EXTERNAL] Re: dems on plain terrains
Sent: Tuesday, August 30, 2022 8:56 AM
To: Ames Stereo Pipeline Support <ames-stereo-pi...@googlegroups.com>
Subject: [EXTERNAL] Re: dems on plain terrains
To view this discussion on the web visit
https://groups.google.com/d/msgid/ames-stereo-pipeline-support/692f4978-e470-45a9-9360-6002a6787906n%40googlegroups.com.

{kind=link}
Mayer, David P
Aug 30, 2022, 2:05:41 PM8/30/22
to Mauro S, Ames Stereo Pipeline Support
Hi Mauro,
I noticed you've set both the correlation kernel and subpixel correlation kernels to 35x35 pixels. There tends not to be much improvement during the subpixel refinement step if those kernels are of equal size. The block matcher should be able to pull out more
detail from a CTX stereopair if you make the subpixel corr kernel smaller. With CTX, I've gotten good results using a subpixel-kernel as small as 13x13. This assumes that there isn't some issue with the image data themselves (non-overlapping histograms, haze,
etc.). I agree with Oleg's suggestion to try on another stereopair as well.
Cheers,
David
David
From: 'Alexandrov, Oleg (ARC-TI)[KBR Wyle Services, LLC]' via Ames Stereo Pipeline Support <ames-stereo-pi...@googlegroups.com>
Sent: Tuesday, August 30, 2022 09:08
To: Mauro S <mgs...@gmail.com>; Ames Stereo Pipeline Support <ames-stereo-pi...@googlegroups.com>
Subject: Re: [EXTERNAL] Re: dems on plain terrains
Sent: Tuesday, August 30, 2022 09:08
To: Mauro S <mgs...@gmail.com>; Ames Stereo Pipeline Support <ames-stereo-pi...@googlegroups.com>
Subject: Re: [EXTERNAL] Re: dems on plain terrains
To view this discussion on the web visit
https://groups.google.com/d/msgid/ames-stereo-pipeline-support/MN2PR09MB5449B0A1C88D401469A2D33088799%40MN2PR09MB5449.namprd09.prod.outlook.com.
Reply all
Reply to author
Forward
0 new messages