Motion Mechanism Round-up

Ryan Carlyle
- Mendel
- Prusa
- Printrbot Simple / Go / Plus
- SmartRap
- Darwin
- Replicator 1 single/dual
- Replicator 2/2x
- FF Creator line
- Duplicator 4 / 4x
- Tons of clones and knock-offs
- Replicator 5th gen
- Replicator Mini
- Replicator Z18
- Fusion 3D F306 http://www.fusion3design.com/
- Core Cube (custom) http://www.thingiverse.com/thing:252041
- Tons of custom builds
- Nicholas Seward's CoreXZ
- Ultimaker 1/2
- Wanhao D5
- Airwolf HD / HDx
- RingRap
- QuadRap
- Kossel
- Rostock
- Wolfstock
- Griffen
- Tons of custom builds
- FirePick by Tin Whiskers
- RappiDelta
- Nicholas Seward's GUS, THOR, LISA
- RepRap Tuga (Scott-Russel linkage)
- Tripteron parallel cartesian mechanism (and quadrupteron, sextuperon)
- Orthoglide
- Various standard SCARA printers (often combined pick-and-place bots)
- Two-arm "parallel" SCARA like the RepRap Morgan
- R/theta/Z Polar 3D
- Theta/Theta/Z "Bipolar" printer (build plate rotates, extruder on Z and theta)
- Polarworks Alta (build plate on Theta/Theta mechanism, extruder on Z)
- ? (man, I want to build one now...)
- Experimental -- http://www.thingiverse.com/thing:375231
- Sli3DR -- http://richrap.blogspot.com.ar/2014/11/sli3dr-3d-printer-design-files-up-on.html
- Experimental -- Ultimaker style gantry utilizing CoreXY style motion mechanics
- Experimental -- 3D variant of CoreXY, with the entire gantry moving up/down as the Z stage
- Experimental -- uses differential motion to "multiplex" the extruder drive into the CoreXY motion drive
- Experimental -- CoreXYZ variant designed to be tilted over on its side to change build area orientation
- Form 1
- B9 Creator
Ryan Carlyle

whosawhatsis
On Friday, May 22, 2015 at 13:13, Ryan Carlyle wrote:
So... what do we call the 3DP1000 and Printrbot Pro mechanisms? They're pretty much just bog-standard XYZ serial Cartesian, right? It's not X-Y-Z or Y-X-Z serial like a typical CNC mill. Y-Z-X serial I think?
--
You received this message because you are subscribed to the Google Groups "3DP Ideas" group.
To unsubscribe from this group and stop receiving emails from it, send an email to 3dp-ideas+...@googlegroups.com.
To post to this group, send email to 3dp-...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/3dp-ideas/0c78efea-1199-4349-8024-058425ea9ba6%40googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
Ryan Carlyle
- Order of adjacent letters indicates order of serial stages, starting from the ground/frame
- Something I'm adding: commas separate independent motion stages
- Apostrophes indicate moving build plate, lack of apostrophe means moving nozzle/tool
- CNC mills define X as the longest linear axis, but for 3D printing it is more typical to define X as the left/right motion axis
- CNC mills define Z as the axis of rotation of the spindle, which for us is the longitudinal axis of the extruder
- Symmetrical parallel mechanisms can be prefixed with #- to indicate number of identical kinematic chains / arms
- Type of arm can be described by a series of joint linkages (combining Pa for parallelogram, R for revolute, S for spherical, U for universal/cardan, P for prismatic/linear), starting from the frame side
- Actuated joints are underlined, passive joints are not
- Something I'm adding: sub-linkages can be described within parentheses
whosawhatsis
--
You received this message because you are subscribed to the Google Groups "3DP Ideas" group.
To unsubscribe from this group and stop receiving emails from it, send an email to 3dp-ideas+...@googlegroups.com.
To post to this group, send email to 3dp-...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/3dp-ideas/ed261de7-53fc-4de5-a749-7e2da19a1f58%40googlegroups.com.
Ryan Carlyle
Many popular 3D printing mechanisms are difficult to define using the above system, due to the use of parallel looped cable/belt drives. Traditional parallel cable-drive robots use a system of unidirectional free-hanging cables (treated as one-way-actuated SPS kinematic chains) that are spooled/unspooled on drums to pull on the end-effector. The most popular example today is the SkyCam system used to provide a bird's-eye view of sporting events.
[picture of Skycam]
Unlike traditional cable-driven robots, 3D printers often use closed loops to provide bi-directional motion from a single cable or belt. When a cable loop is arranged on a single axis, it is functionally equivalent to a prismatic joint actuated by a leadscrew or hydraulic cylinder. For example, the Replicator Cartesian gantry uses a series prismatic PP arrangement of cable-drive actuators for the X and Y axes, and a separate P leadscrew-drive actuator for the Z axis.
[diagram of replicator cartesian prismatic cable actuators]
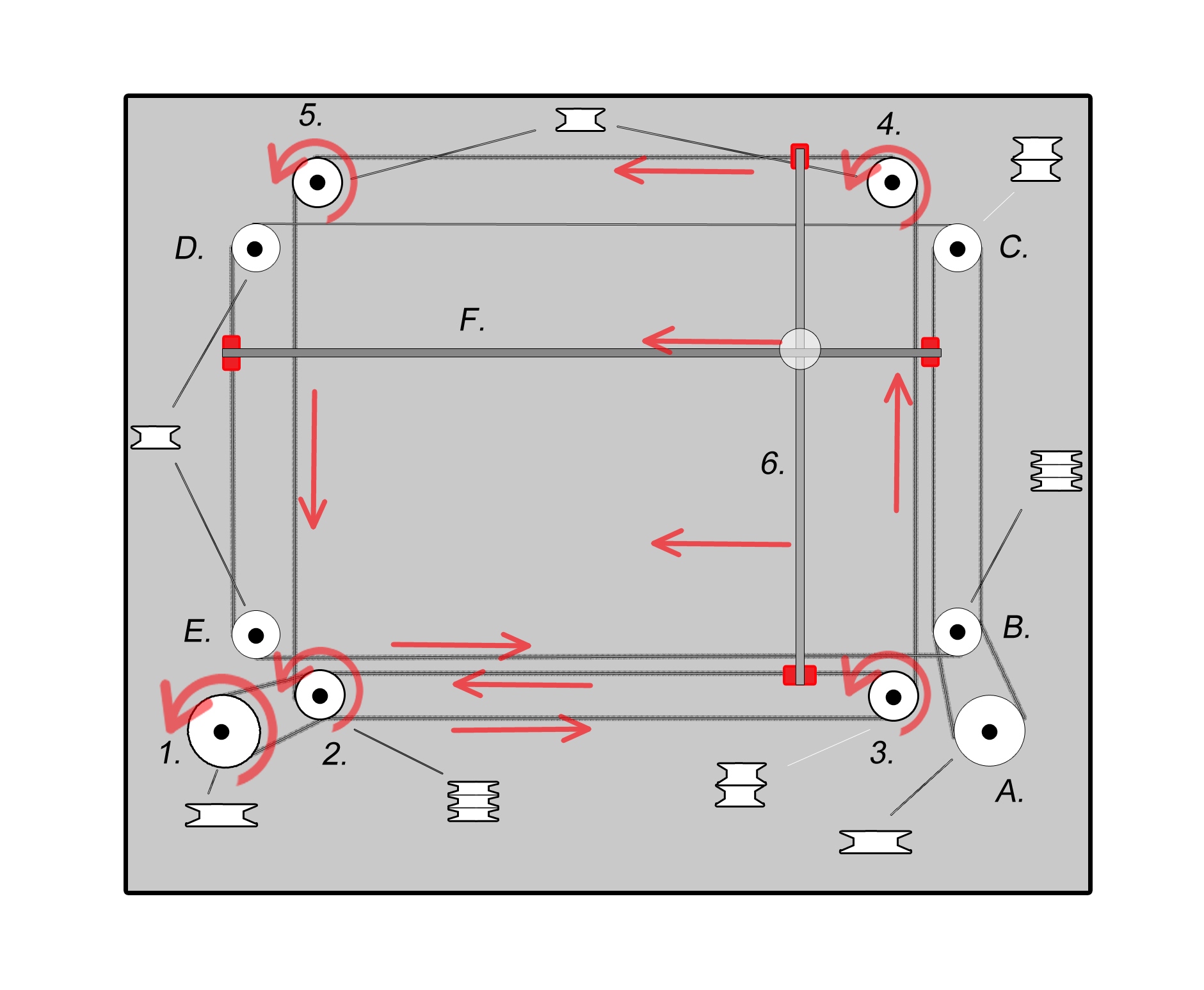
But parallel looped cable-drive schemes are also possible. These are quite uncommon in general robot control applications and have not been discussed much in the academic literature. For example, the H-Bot and CoreXY gantries utilize loops of belts/cables to move a Cartesian gantry along actuator axes that do not correspond with the gantry axes. This arrangement is unique in that the prismatic cable-drive actuator motion is split amongst two (or more) prismatic joints in the mechanism.
[diagram of H-bot and CoreXY prismatic cable actuators]
[diagram of H-bot and CoreXY serial gantry links]
This sort of hybrid serial/parallel arrangement is relatively novel in the field of robot control, but is very advantageous for 3D printing due to the low moving mass, simple control, and favorable precision:cost ratio. In this text, it will be described using a new nomenclature to show that the actuator axis is split between two (or more) mechanism joints. The representation P[j,i,...] will be used to show that the prismatic actuator's motion is split between other joints. Some function then relates the motions of the joints, such as P=Pj+Pi so that the total prismatic actuator travel is equal to the sums of the prismatic j joint travel and prismatic i joint travel. So a CoreXY gantry may be called a 2-P[PP] mechanism, to show that each prismatic actuator has its travel split between the two serial Cartesian gantry axes.
Some examples of common 3D printing mechanisms described with this nomenclature:
Replicator or RepRap Cartesian gantry with independent build table: PP,P
Three-axis serial CNC mill gantry: PPP
Column Delta: 3-PRPaR
H-Bot, CoreXY, UltiCore: 2-P[PP]
CoreXYZ: 4-P[PPP]
Tripteron: 3-PRRR
Some examples of robots not generally used for 3D printing:
Stewart-Gough hexapod: 6-UPS (flight simulators)
Clavel's Delta with rotary gripper axis: 3-RRPaR,RUPU (pick and place)
SCARA: RRP (pick and place)
Based on this description system, it is possible to rapidly communicate the basic kinematic structure of a wide range of robot mechanisms. It is also possible to calculate the degrees of freedom and basic constraint conditions of the mechanism. But the specific kinematic equations will depend on the arrangement of these linkages. It is possible for two robots to have the same kinematic chain description but with very different performance characteristics, such as by changing the relative positions of the joints at the base end or effector end of each chain. Various sub-class terminology can also be used (eg MSSM, TSSM, etc for 6-UPS Stewart-Gough hexapods) but this is not particularly relevant to 3D printing and will not be discussed here.
Ryan Carlyle
whosawhatsis
Ryan Carlyle
Ryan Carlyle
Ryan Carlyle
Ryan Carlyle
whosawhatsis
On Monday, November 16, 2015 at 17:13, Ryan Carlyle wrote:
Anybody know a name for the Printrbot Simple style X stage, where most of the linear stage moves and only the bearings and motor are stationary?
--
You received this message because you are subscribed to a topic in the Google Groups "3DP Ideas" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/3dp-ideas/e1vq3Y4ICYs/unsubscribe.
To unsubscribe from this group and all its topics, send an email to 3dp-ideas+...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/3dp-ideas/319cc67c-20d5-4eb3-b783-02b12d52323a%40googlegroups.com.
Ryan Carlyle
On Monday, November 16, 2015 at 8:18:09 PM UTC-6, Whosa whatsis wrote:
I've got a bunch of names for it... none of them polite.The way the belt works can be thought of as a modified rack-and-pinion setup (I wouldn't be surprised if Brook had early prototypes that worked that way). This part isn't too bad, and doesn't require moving the majority of the mass the way Printrbots do. I've done some prototypes for a system that uses a single bearing (instead of the pair that Printrbot usually uses and can run a moving platform without requiring it to be longer than its range of travel the way the Printrbot version does. It doesn't help if you're moving the rods like a Printrbot though, because those still have to be as long as the travel + bearings (which means the minimum desk space required is still 2x travel + bearing length, rather than just 2x travel as with other moving platform designs).The part about moving most of the mass is bad for a printer, both for the purpose of moving mass and the length issue above. It is a system that's common on manual vertical mills though, and for those it's not so bad. Sure, it makes the machine require more space than it otherwise would, but it has the advantage that you can always have your bearings directly below your tool, so (if you're using some kind of supported rail and not just clamping it at the ends the way almost all of the Printrbots do (I believe the metal plus uses HIWIN-style rails, making it the only exception), you don't have to worry about deflection, because even if it does deflect, the part under the tool is held in place.On Monday, November 16, 2015 at 17:13, Ryan Carlyle wrote:
Anybody know a name for the Printrbot Simple style X stage, where most of the linear stage moves and only the bearings and motor are stationary?--
You received this message because you are subscribed to a topic in the Google Groups "3DP Ideas" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/3dp-ideas/e1vq3Y4ICYs/unsubscribe.
To unsubscribe from this group and all its topics, send an email to 3dp-ideas+unsubscribe@googlegroups.com.
whosawhatsis
To unsubscribe from this group and all its topics, send an email to 3dp-ideas+...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/3dp-ideas/9761f246-9da1-4f2c-97fe-345f84512b63%40googlegroups.com.

JF Kansas
Hows this for motion. lol
Could be simplified a little since a stepper can be put directly on 2 and 3. Isn't this pretty much how an Ulitmaker works?
"Simpson" style grounded Delta
Ryan Carlyle
Ryan Carlyle
Ryan Carlyle

JasonB
Ryan Carlyle

adam paul
A delta would be easier to build, but I feel a Cartesian would be better suited to the environment. I would love to hear y'alls thoughts on this.
Ryan Carlyle
adam paul
Ryan Carlyle
adam paul
whosawhatsis
On Saturday, May 14, 2016 at 14:17, adam paul wrote:
Just ideas we're throwing around, things that haven't been done yet are always encouraged in the circuit. My cage builder and I had imbibed quite a bit that night. Robust and reliable would be the mantra. My car was, separately but just by a few weeks, backed up over and rear ended so a "shortened bus" theme might win out.
--You received this message because you are subscribed to a topic in the Google Groups "3DP Ideas" group.To unsubscribe from this topic, visit https://groups.google.com/d/topic/3dp-ideas/e1vq3Y4ICYs/unsubscribe.To unsubscribe from this group and all its topics, send an email to 3dp-ideas+...@googlegroups.com.To post to this group, send email to 3dp-...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/3dp-ideas/21c70e33-b3fa-435f-9a94-1005e2288278%40googlegroups.com.
whosawhatsis

Joseph Chiu (Toybuilder)
--
You received this message because you are subscribed to the Google Groups "3DP Ideas" group.
To unsubscribe from this group and stop receiving emails from it, send an email to 3dp-ideas+...@googlegroups.com.
To post to this group, send email to 3dp-...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/3dp-ideas/D10C349CDD6541AB8215830F92DDD941%40gmail.com.

Luka Verigic
cantilevered core xy, cool!:)
"Simpson" style tripod (called "grounded Deltas" by Nick)
Ryan Carlyle
JasonB
Ryan Carlyle
Whosawhatsis
--
You received this message because you are subscribed to a topic in the Google Groups "3DP Ideas" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/3dp-ideas/e1vq3Y4ICYs/unsubscribe.
To unsubscribe from this group and all its topics, send an email to 3dp-ideas+...@googlegroups.com.
To post to this group, send email to 3dp-...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/3dp-ideas/0cfa31ec-0cb7-4ba2-9f58-f2f9f00a76bf%40googlegroups.com.
Ryan Carlyle
On Thursday, August 11, 2016 at 12:49:20 PM UTC-5, Whosa whatsis wrote:
I have some partially-built stuff with the same layout. I've been calling it "core-T".
From: Ryan Carlyle <temp...@gmail.com>
Reply: Ryan Carlyle <temp...@gmail.com>
Date: August 10, 2016 at 20:02:18
To: 3DP Ideas <3dp-...@googlegroups.com>
Subject: [3dp-ideas] Re: Motion Mechanism Round-up
That's cool, but it shouldn't be called CoreXY. Needs a different name.
--
You received this message because you are subscribed to a topic in the Google Groups "3DP Ideas" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/3dp-ideas/e1vq3Y4ICYs/unsubscribe.
To unsubscribe from this group and all its topics, send an email to 3dp-ideas+unsubscribe@googlegroups.com.
adam paul
Ryan Carlyle
Whosawhatsis
From: Ryan Carlyle <temp...@gmail.com>
Reply: Ryan Carlyle <temp...@gmail.com>
Date: December 1, 2016 at 10:33:46
To: 3DP Ideas <3dp-...@googlegroups.com>
--
You received this message because you are subscribed to a topic in the Google Groups "3DP Ideas" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/3dp-ideas/e1vq3Y4ICYs/unsubscribe.
To unsubscribe from this group and all its topics, send an email to 3dp-ideas+...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/3dp-ideas/f57fc016-b429-413e-bcd9-0900509405bd%40googlegroups.com.
Ryan Carlyle
On Thursday, December 1, 2016 at 1:06:08 PM UTC-6, Whosa whatsis wrote:
Does that mean that a universal joint delta is not a delta?
From: Ryan Carlyle <temp...@gmail.com>
Reply: Ryan Carlyle <temp...@gmail.com>
Date: December 1, 2016 at 10:33:46
To: 3DP Ideas <3dp-...@googlegroups.com>
Subject: Re: [3dp-ideas] Re: Motion Mechanism Round-up
Oh yeah, Nick Seward has been talking about building one of those for ages. He was posting links to that guy's build on G+ a couple days ago. Nice to see it actually printing.--Also, it's patented. https://www.google.com/patents/US6729202Anybody using the word "delta" anywhere near this thing doesn't know what they're talking about. In 2002 the arrangement was named a "Cartesian Parallel Manipulator" for which the proper classification is "3-PRRR parallel robot" if you want to get technical. Column deltas are 3-PRPaR -- the parallelogram arms are critical to the classification, and anything without parallelogram arms is not a delta.
On Thursday, December 1, 2016 at 9:37:52 AM UTC-6, adam paul wrote:I saw this today, crazy Canadiens. It's described as a Cartesian/decoupled delta.
You received this message because you are subscribed to a topic in the Google Groups "3DP Ideas" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/3dp-ideas/e1vq3Y4ICYs/unsubscribe.
To unsubscribe from this group and all its topics, send an email to 3dp-ideas+unsubscribe@googlegroups.com.
Ryan Carlyle
adam paul
Ryan Carlyle

ekaggrat singh kalsi
Ryan Carlyle
Whosawhatsis
From: adam paul <adam...@gmail.com>
Reply: adam paul <adam...@gmail.com>
Date: March 7, 2017 at 19:34:42
To: 3DP Ideas <3dp-...@googlegroups.com>
Subject: Re: [3dp-ideas] Re: Motion Mechanism Round-up
--
You received this message because you are subscribed to a topic in the Google Groups "3DP Ideas" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/3dp-ideas/e1vq3Y4ICYs/unsubscribe.
To unsubscribe from this group and all its topics, send an email to 3dp-ideas+...@googlegroups.com.
To post to this group, send email to 3dp-...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/3dp-ideas/33c47e7a-3905-4578-b2c5-2765e2fddb9b%40googlegroups.com.
Whosawhatsis
From: Ryan Carlyle <temp...@gmail.com>
Reply: Ryan Carlyle <temp...@gmail.com>
Date: March 9, 2017 at 12:44:02
To: 3DP Ideas <3dp-...@googlegroups.com>
Subject: Re: [3dp-ideas] Re: Motion Mechanism Round-up
--
You received this message because you are subscribed to a topic in the Google Groups "3DP Ideas" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/3dp-ideas/e1vq3Y4ICYs/unsubscribe.
To unsubscribe from this group and all its topics, send an email to 3dp-ideas+...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/3dp-ideas/cb3bab77-9780-4d68-9664-1300fd735e86%40googlegroups.com.
Ryan Carlyle
On Thursday, March 9, 2017 at 3:27:33 PM UTC-6, Whosa whatsis wrote:
One of the Core-T designs would be better-suited for a (semi-)independent X carriages. That would only require three motors. If you do the one with Y as a straight cartesian, you can put the two T shapes on opposite sides and it would make the forces balance better, whether you're in duplication mode or switching off. Of course, at that point, it's tempting to add the fourth motor to make them independent in X _and_ Y. This would allow you could do Escher-style printing without carrying any X/Y motors around.
From: Ryan Carlyle <temp...@gmail.com>
Reply: Ryan Carlyle <temp...@gmail.com>
Date: March 9, 2017 at 12:44:02
To: 3DP Ideas <3dp-...@googlegroups.com>
Subject: Re: [3dp-ideas] Re: Motion Mechanism Round-up
What a weird design.--No, it needs all four motors, unless you make major changes to the point that it becomes unrecognizable. (IE one of the two CoreXY gantries stops being CoreXY.) It's true that you only have three DOFs for X,Y,U, but that's just because you took two independent 2-DOF, 2-motor gantries and coupled them together in a way that they are forced to share a DOF. Each CoreXY gantry still has to provide Y motion. They're just not allowed to have different Y positions.If anything, they're going to fight each other due to overconstraint. Depending on how the pulleys and motor wiring line up the "power on" positions for the drivers, you might actually end up with one pair of motors driving and the other pair braking during all Y moves. Depending on how far out of sync they are, it's not hard to end up with LESS torque. Using one bigger motor with twice the torque is better than two smaller motors.The argument the creator makes about X inertia vs Y inertia requiring 4 motors doesn't make any sense. The inertias can be different for different directions. Doesn't hurt anything, unless 1) you're using servos and 2) the Y axis is so much heavier than the X axis (like 10-100x) that you can't properly tune the servos for both directions of motion.
On Thursday, March 9, 2017 at 12:53:44 AM UTC-6, ekaggrat singh kalsi wrote:dual core xy,,, i think i could be done with 3 motors... something like the core xye
You received this message because you are subscribed to a topic in the Google Groups "3DP Ideas" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/3dp-ideas/e1vq3Y4ICYs/unsubscribe.
To unsubscribe from this group and all its topics, send an email to 3dp-ideas+unsubscribe@googlegroups.com.
Whosawhatsis
To unsubscribe from this group and all its topics, send an email to 3dp-ideas+...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/3dp-ideas/873fd2bb-39e4-4ab2-86d5-fda6f552a57b%40googlegroups.com.
Ryan Carlyle

Tarjei Knapstad
Whosawhatsis
--
You received this message because you are subscribed to the Google Groups "3DP Ideas" group.
To unsubscribe from this group and stop receiving emails from it, send an email to 3dp-ideas+...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/3dp-ideas/af26932a-9eaf-45a2-bb55-9c5a38866fa4%40googlegroups.com.
Ryan Carlyle
To unsubscribe from this group and stop receiving emails from it, send an email to 3dp-ideas+unsubscribe@googlegroups.com.
Luka Verigic
To unsubscribe from this group and stop receiving emails from it, send an email to 3dp-ideas+...@googlegroups.com.
Ryan Carlyle
Usually when people make 2-DOF parallel arm robots, it's for XY motion. Never seen somebody do XZ motion with a separate Y stage.
Not gonna lie, this looks like it combines the worst of both worlds. Giant machine envelope to build volume ratio. Heavy Y stage to sling around. Non-linear kinematics issues.