
KP4MD
Jan 5, 2013, 11:34:58 PM1/5/13
to 2-mete...@googlegroups.com



n6gn
Jan 6, 2013, 1:35:21 AM1/6/13
to 2-mete...@googlegroups.com

Scott Avery
Jan 6, 2013, 1:40:48 AM1/6/13
to KP4MD, 2-mete...@googlegroups.com
Carol,
Great write up!
Stacked horizontal antennas always a winner.
Do you have any specific design data on the half loop antennas and
phasing?
When doing LEO satellite work, used a vertical/horizontal
combination.
Was the angle of the dangle for that work! HI
I know low angle horizontal antennas “omni” are the way to go!
73, Scott WA6LIE
--
You received this message because you are subscribed to the Google Groups "2 Meter WSPR" group.
To post to this group, send email to 2-mete...@googlegroups.com.
To unsubscribe from this group, send email to 2-meter-wspr...@googlegroups.com.
Visit this group at http://groups.google.com/group/2-meter-wspr?hl=en.
For more options, visit https://groups.google.com/groups/opt_out.
You received this message because you are subscribed to the Google Groups "2 Meter WSPR" group.
To post to this group, send email to 2-mete...@googlegroups.com.
To unsubscribe from this group, send email to 2-meter-wspr...@googlegroups.com.
Visit this group at http://groups.google.com/group/2-meter-wspr?hl=en.
For more options, visit https://groups.google.com/groups/opt_out.
Scott Avery
Jan 6, 2013, 2:03:51 AM1/6/13
to n6gn, 2-mete...@googlegroups.com
Glen,
I need to hire you to put up antennas!
Need to place lines in specific places..
Have already come up with the theory and methods, just need a chopper and
pilot.
Seems that you need a fairly big bird to haul up a little weight, so the
recreational type cheap remote choppers won’t cut the mustard.
Have used balloon, tree and kite suspended antennas for years!
73, Scott
n6gn
Jan 6, 2013, 10:29:37 PM1/6/13
to 2-mete...@googlegroups.com, n6gn
Scott,
I don't think you want me to put them up, at least not yet! I definitely am getting better but nowhere near ready to do much useful. The good news, I think, is that a fairly small (read "less expensive") quad can be quite adequate. This is important since crashes can be costly. Prices have come down a lot and one can lift most or more of a pound for less than $500 of hardware. That seems enough to do a lot.
Becoming a good pilot is important though, hauling conductors around the sky is potentially dangerous, so much so that QEX/QST wouldn't touch the Flying Antenna article I offered Video here
even though I recently saw a photo near the front of a recent QST showing someone using a quad-copter to put up wire antennas. The lawyers were scared of the liability but somehow a photo got past them. Go figure. Seems a shame that one can no longer present a project that *might* be dangerous - no linear amplifier power supplies, no big transmitters, no balloon supported antennas (one entered first-time and just won the 160m multi- contest) - all because of the threats of lawyers, a very long prior history to the contrary not withstanding.
best,
Glenn n6gn
I don't think you want me to put them up, at least not yet! I definitely am getting better but nowhere near ready to do much useful. The good news, I think, is that a fairly small (read "less expensive") quad can be quite adequate. This is important since crashes can be costly. Prices have come down a lot and one can lift most or more of a pound for less than $500 of hardware. That seems enough to do a lot.
Becoming a good pilot is important though, hauling conductors around the sky is potentially dangerous, so much so that QEX/QST wouldn't touch the Flying Antenna article I offered Video here
even though I recently saw a photo near the front of a recent QST showing someone using a quad-copter to put up wire antennas. The lawyers were scared of the liability but somehow a photo got past them. Go figure. Seems a shame that one can no longer present a project that *might* be dangerous - no linear amplifier power supplies, no big transmitters, no balloon supported antennas (one entered first-time and just won the 160m multi- contest) - all because of the threats of lawyers, a very long prior history to the contrary not withstanding.
best,
Glenn n6gn
KP4MD
Jan 12, 2013, 6:32:24 PM1/12/13
to 2-mete...@googlegroups.com

n6gn
Jan 12, 2013, 7:13:50 PM1/12/13
to 2-mete...@googlegroups.com
Carol,
Thanks for posting your investigations. While I think my experience concurs with your conclusion, it seems to me that you are modelling these rather close to ground. I reran the halo (only) at 4 lambda instead of .5 lambda height and the results are so different -indicating a high sensitivity- that I think you might do well to compare all the others at considerable height as well. My experience, both practical and with modelling tools, is that the ground location, model and effect dominate the operation of most of our antennas and much of our propagation.
Glenn n6gn
Thanks for posting your investigations. While I think my experience concurs with your conclusion, it seems to me that you are modelling these rather close to ground. I reran the halo (only) at 4 lambda instead of .5 lambda height and the results are so different -indicating a high sensitivity- that I think you might do well to compare all the others at considerable height as well. My experience, both practical and with modelling tools, is that the ground location, model and effect dominate the operation of most of our antennas and much of our propagation.
Glenn n6gn
Scott Avery
Jan 12, 2013, 7:25:16 PM1/12/13
to KP4MD, 2-mete...@googlegroups.com
Carol,
What a great research article!
Shed a lot of light on my past experiments.
Never considered a Delta loop horizontal, as I am a Delta loop fan, and
always in the vertical plane.
Main reason is construction details, easier to make a round loop or square.
Hmmmm...
Very enlightening!
Thanks for sharing your research!
73, Scott WA6LIE
KP4MD
Jan 12, 2013, 11:54:18 PM1/12/13
to
Glenn,
On Saturday, January 12, 2013 4:13:50 PM UTC-8, n6gn wrote:
I appreciate your insights and agree with your observations. My two reasons to model at that low height were:
- It represents my current antenna location with respect to the multiple metal rooftops in my neighborhood and
- It yields simple single lobe patterns in the diagrams.
73, Carol KP4MD/W6
On Saturday, January 12, 2013 4:13:50 PM UTC-8, n6gn wrote:
Carol,
Thanks for posting your investigations. While I think my experience concurs with your conclusion, it seems to me that you are modelling these rather close to ground. I reran the halo (only) at 4 lambda instead of .5 lambda height and the results are so different -indicating a high sensitivity- that I think you might do well to compare all the others at considerable height as well. My experience, both practical and with modelling tools, is that the ground location, model and effect dominate the operation of most of our antennas and much of our propagation.
Glenn n6gn
KP4MD
Jan 12, 2013, 11:50:53 PM1/12/13
to 2-mete...@googlegroups.com, KP4MD
Dear Scott,
Thanks for your input. While the Delta Loop is a continuous full wave loop, the Cebik Triangle consists of three discrete half wave dipoles fed in phase.
The Cebik Triangle has nulls in the radiation pattern directly above and below it while a horizontal Delta Loop would favor radiation directly above and below it.
The Cebik Triangle has nulls in the radiation pattern directly above and below it while a horizontal Delta Loop would favor radiation directly above and below it.
Carol

Steven Hess
Jan 12, 2013, 11:58:30 PM1/12/13
to KP4MD, 2-mete...@googlegroups.com
Horizontal polarization or oriented with the loop itself horizontal?
--
____________
Apply appropriate technology. Use what works without prejudice.
Steven L Hess ARS KC6KGE DM05gd22
Google Voice 661 769 6201 +SMS
openSUSE Linux 12.1 KDE 4.7.2
Known as FlameBait and The Sock Puppet of Doom.
--
You received this message because you are subscribed to the Google Groups "2 Meter WSPR" group.
To post to this group, send email to 2-mete...@googlegroups.com.
To unsubscribe from this group, send email to 2-meter-wspr...@googlegroups.com.
Visit this group at http://groups.google.com/group/2-meter-wspr?hl=en.
For more options, visit https://groups.google.com/groups/opt_out.
____________
Apply appropriate technology. Use what works without prejudice.
Steven L Hess ARS KC6KGE DM05gd22
Google Voice 661 769 6201 +SMS
openSUSE Linux 12.1 KDE 4.7.2
Known as FlameBait and The Sock Puppet of Doom.
KP4MD
Jan 18, 2013, 7:56:09 PM1/18/13
to 2-mete...@googlegroups.com
I've posted two new pages to illustrate the effect of increasing antenna height of single omnidirectional horizontal antennas on radiation patterns.
Raising the antenna from 1/2 wavelength to 1 wavelength, the major lobe becomes narrower with increased gain, and an increasing proportion of radiated energy appears in minor lobes at higher elevation angles.
Antennas stacked one half wavelength apart synergistically concentrate the gain at the desired low radiation angle while suppressing the minor lobes.
Antennas stacked one half wavelength apart synergistically concentrate the gain at the desired low radiation angle while suppressing the minor lobes.
On Saturday, January 12, 2013 4:13:50 PM UTC-8, n6gn wrote:
Carol,
Thanks for posting your investigations. While I think my experience concurs with your conclusion, it seems to me that you are modelling these rather close to ground. I reran the halo (only) at 4 lambda instead of .5 lambda height and the results are so different -indicating a high sensitivity- that I think you might do well to compare all the others at considerable height as well. My experience, both practical and with modelling tools, is that the ground location, model and effect dominate the operation of most of our antennas and much of our propagation.
Glenn n6gn
KP4MD
Jan 18, 2013, 8:01:39 PM1/18/13
to 2-mete...@googlegroups.com, KP4MD
The details of my stacked halo antennas are described in narrative form on web page http://www.qsl.net/kp4md/144_mhz_halo.htm
You may read alternative design plans through the reference links at the bottom of that web page.
Carol
KP4MD
Jan 20, 2013, 7:24:40 AM1/20/13
to 2-mete...@googlegroups.com, KP4MD
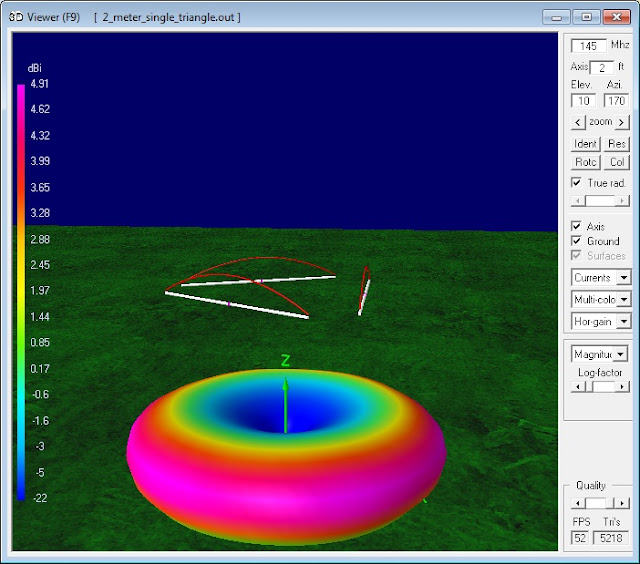
Full construction details for Cebik's three dipole triangle and circular omnidirectional antenna designs appear in his article "A New Spin on the Big Wheel", QST, March 2008, 30-34.
Carol
Steven Hess
Jan 20, 2013, 5:40:46 PM1/20/13
to 2-mete...@googlegroups.com
Printed off for future reference.
From a building standpoint I think the Halo array KP4MD has is less demanding of super fine tolerances than even this modified set up.
I want to try and match the gain I am getting now and that might be difficult even with a two antenna stacked array.
--
You received this message because you are subscribed to the Google Groups "2 Meter WSPR" group.
To post to this group, send email to 2-mete...@googlegroups.com.
To unsubscribe from this group, send email to 2-meter-wspr...@googlegroups.com.
Visit this group at http://groups.google.com/group/2-meter-wspr?hl=en.
For more options, visit https://groups.google.com/groups/opt_out.
KP4MD
Jan 20, 2013, 8:46:03 PM1/20/13
to 2-mete...@googlegroups.com
Considering that a stacked halo pair theoretically yields 8 dB lower gain than your Yagi, your 7 spots here earlier today that were -22 dB or stronger may have made it over the threshold for me to detect were you transmitting with a halo pair.
Carol
| Power | Reported | Distance | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Date | Call | Frequency | SNR | Drift | Grid | dBm | W | by | loc | km | mi |
| 2013-01-20 17:16 | KC6KGE | 144.490441 | -23 | -4 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 16:32 | KC6KGE | 144.490421 | -27 | 1 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 16:14 | KC6KGE | 144.490412 | -31 | -1 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 15:50 | KC6KGE | 144.490404 | -31 | -1 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 15:40 | KC6KGE | 144.490418 | -20 | 3 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 15:28 | KC6KGE | 144.490425 | -30 | -3 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 14:14 | KC6KGE | 144.490425 | -25 | -2 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 13:46 | KC6KGE | 144.490426 | -16 | -1 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 13:38 | KC6KGE | 144.490422 | -22 | -2 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 13:30 | KC6KGE | 144.490433 | -21 | 1 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 13:02 | KC6KGE | 144.490419 | -26 | -2 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 12:52 | KC6KGE | 144.490414 | -28 | 1 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 12:40 | KC6KGE | 144.490408 | -23 | -1 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 12:30 | KC6KGE | 144.490421 | -21 | -3 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 12:10 | KC6KGE | 144.490416 | -33 | 0 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 10:52 | KC6KGE | 144.490417 | -28 | 2 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 10:44 | KC6KGE | 144.490411 | -28 | -2 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 10:20 | KC6KGE | 144.490426 | -31 | -3 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 09:40 | KC6KGE | 144.490421 | -32 | -2 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 09:28 | KC6KGE | 144.490422 | -26 | -2 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 08:40 | KC6KGE | 144.490419 | -31 | -2 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 07:20 | KC6KGE | 144.490450 | -27 | -3 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 06:48 | KC6KGE | 144.490439 | -23 | -1 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 06:12 | KC6KGE | 144.490431 | -29 | -1 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 06:04 | KC6KGE | 144.490441 | -25 | -2 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 05:52 | KC6KGE | 144.490441 | -24 | -1 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 05:16 | KC6KGE | 144.490437 | -24 | -2 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 05:08 | KC6KGE | 144.490449 | -21 | -2 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |
| 2013-01-20 01:36 | KC6KGE | 144.490444 | -15 | -2 | DM05gd | +43 | 19.953 | KP4MD | CM98iq | 426 | 265 |

{kind=link}
Line Printer
Jan 21, 2013, 9:42:46 AM1/21/13
to KP4MD, 2-mete...@googlegroups.com
On Sat, 5 Jan 2013, KP4MD wrote:
> The halo, turnstile and eggbeater antennas are commonly used when omni-directional horizontal polarization is
> desired for weak signal VHF terrestrial communications. ï¿œThese antennas are frequently stacked to increase gain at
> The halo, turnstile and eggbeater antennas are commonly used when omni-directional horizontal polarization is
> low elevation angles and to decrease sensitivity to galactic noise from high elevation angles. ï¿œThis study uses NEC
> modeling to compare the expected performance of stacked pairs of each of these antenna designs.
Thank you for taking the time to do this comparison of these antenna
models and presenting the parameters and visualizations!
There's much to be learned about the antenna systems and what effects
various system changes can be expected. This makes me interested in
learning how to work with software tools and antenna models. From my first
glance at the tools, there appear to be subtle differences in how each
may treat a given model file. I tried several different tools on several
model files from the "144 MHz Omnidirectional Horizontal Antennas - Part
1" document and some random sample NEC files. The results were
interesting(!) but I wasn't able convince the tools to behave as if I had
previously read their user documentation......
For situations where antenna systems have unusual requirements, I suspect
that the antenna models could be used as food for thought and grounds for
further research. ^-^
73,
Kevin Martinez
KI6STW
btw, I tried tools from the unix/linux environment like qantenna,
xnecview, xnec2c, nec2++. The results ranged from "Segmentation fault" to
images of the model antennas.
--
------------------------------------------------------------------------
Line Printer System | HODIE NATUS EST RADICI FRATER
lps at rahul 'dot' net | 645/6180 BOS/BCE
------------------------------------------------------------------------
Line Printer
Jan 22, 2013, 3:42:15 AM1/22/13
to n6gn, 2-mete...@googlegroups.com
On Sun, 6 Jan 2013, n6gn wrote:
> I don't think you want me to put them up, at least not yet!ᅵ I definitely am getting better but nowhere near ready
r/c aircraft skills. Last autumn, I decided to upgrade from the micro r/c
helicopter to a r/c quadcopter that would be useful in the outdoor
environment. Switching to this type of aircraft has been more
challenging than expected but I've got at least an initial idea of what
could be done with them - aside from relearning to fly them.
I opted for a Blade mQX Quadrocopter based on that it would be a tradeoff
or combination of having low cost yet useful durability. Because I already
had useful equipment (transmitter), I purchased the "bind-'n-fly" mQX
Quadcopter and several extra batteries. At $148, I approximate this as
the lowest cost point. I've found that the mQX can fly for 10 minutes
with no load. I've also found that this aircraft can lift 28 grams amd
still hover and be responsive to controls. I'm not sure how long it can
fly while loaded with 28 grams but it will be less than the unloaded
flight times.
I've no issues or repairs required with my mQX despite my continuing
attempted efforts to fly (and land).
(the mQX is too small to lift my GoPro camera!)
Adding additional or using larger batteries can increase potential
flight times but remove from the payload capacity. With a mQX size
quadrocopter, battery capacity increases quickly reach a point where it
cannot fly.
Increasing quadrocopter size should allow for larger payload capacity.
The increased mass would ensure the aircraft to be more stable and
resistant to winds and wind effects on antenna payloads.
The aircraft's r/c radio system is something to consider. My transitter
is powered by a set of 4 AA batteries and transmits in the 2.4 ghz band.
The receiver's antenna is not a work of art, it's a small length of magnet
wire. I've never tested the bounds of the flight controls with my
equipment. I think the aircraft's control system is supposed to detect the
lack of a reliable transmitter signal and automagically switch to the
zero-throttle mode - allowing it to fall from the clouds - regaining the
transmitter signal would then allow the aircraft to become controllable
again. To be sure this is the case, I'd probably have to read the
documentation!
I am sure that this wasn't the case when during the times I flew several
r/c helicopters, it was quite possible that the aircraft could easily fly
off in any direction at full throttle, never to be seen again.....
(or to easily disassemble itself) Of course, those were the premodern
days before Y2K....
Since this is posted to the 2 Meter WSPR group, I feel it is mandatory to
mention that a Blade mQX Quadrocopter flies quietly as a WSPR, even
hovering at 2 Meters.
^-^
PostScript:
mQX Quadrocopter mentioned above:
https://picasaweb.google.com/112916124640757906440/21stCenturyHolidaze#5835304562312151362
mQX Quadrocopter receiver's antenna mentioned above:
https://picasaweb.google.com/112916124640757906440/NonarthopodicAntenna#5836185412651179682
Perhaps this has redeeming value,
Kevin Martinez
KI6STW
> I don't think you want me to put them up, at least not yet!ᅵ I definitely am getting better but nowhere near ready
> to do much useful. The good news, I think, is that a fairly small (read "less expensive") quad can be quite
> adequate. This is important since crashes can be costly. Prices have come down a lot and one can lift most or more
> of a pound for less than $500 of hardware. That seems enough to do a lot.
For part of my recovery/healing process, I've been working on regaining my
> adequate. This is important since crashes can be costly. Prices have come down a lot and one can lift most or more
> of a pound for less than $500 of hardware. That seems enough to do a lot.
r/c aircraft skills. Last autumn, I decided to upgrade from the micro r/c
helicopter to a r/c quadcopter that would be useful in the outdoor
environment. Switching to this type of aircraft has been more
challenging than expected but I've got at least an initial idea of what
could be done with them - aside from relearning to fly them.
I opted for a Blade mQX Quadrocopter based on that it would be a tradeoff
or combination of having low cost yet useful durability. Because I already
had useful equipment (transmitter), I purchased the "bind-'n-fly" mQX
Quadcopter and several extra batteries. At $148, I approximate this as
the lowest cost point. I've found that the mQX can fly for 10 minutes
with no load. I've also found that this aircraft can lift 28 grams amd
still hover and be responsive to controls. I'm not sure how long it can
fly while loaded with 28 grams but it will be less than the unloaded
flight times.
I've no issues or repairs required with my mQX despite my continuing
attempted efforts to fly (and land).
(the mQX is too small to lift my GoPro camera!)
Adding additional or using larger batteries can increase potential
flight times but remove from the payload capacity. With a mQX size
quadrocopter, battery capacity increases quickly reach a point where it
cannot fly.
Increasing quadrocopter size should allow for larger payload capacity.
The increased mass would ensure the aircraft to be more stable and
resistant to winds and wind effects on antenna payloads.
The aircraft's r/c radio system is something to consider. My transitter
is powered by a set of 4 AA batteries and transmits in the 2.4 ghz band.
The receiver's antenna is not a work of art, it's a small length of magnet
wire. I've never tested the bounds of the flight controls with my
equipment. I think the aircraft's control system is supposed to detect the
lack of a reliable transmitter signal and automagically switch to the
zero-throttle mode - allowing it to fall from the clouds - regaining the
transmitter signal would then allow the aircraft to become controllable
again. To be sure this is the case, I'd probably have to read the
documentation!
I am sure that this wasn't the case when during the times I flew several
r/c helicopters, it was quite possible that the aircraft could easily fly
off in any direction at full throttle, never to be seen again.....
(or to easily disassemble itself) Of course, those were the premodern
days before Y2K....
Since this is posted to the 2 Meter WSPR group, I feel it is mandatory to
mention that a Blade mQX Quadrocopter flies quietly as a WSPR, even
hovering at 2 Meters.
^-^
PostScript:
mQX Quadrocopter mentioned above:
https://picasaweb.google.com/112916124640757906440/21stCenturyHolidaze#5835304562312151362
mQX Quadrocopter receiver's antenna mentioned above:
https://picasaweb.google.com/112916124640757906440/NonarthopodicAntenna#5836185412651179682
Perhaps this has redeeming value,
Kevin Martinez
KI6STW
KP4MD
Jan 22, 2013, 8:42:18 PM1/22/13
to 2-mete...@googlegroups.com, KP4MD
Thanks sharing your experience with the various antenna modeling programs. It would seem that NEC card files behave differently with various implementations of the NEC code. I know for one that 4nec2 crashes when modeling a zero pitch helix. For that reason, I specified the loop pitch as an infinitesimal 1e-300 with which 4nec2 quite happily yields the desired results.
Carol
Reply all
Reply to author
Forward
0 new messages