Troubleshooting X-Axis Model Shifting
527 views
Skip to first unread message

Jonathon - 3D Tasmania
Oct 29, 2013, 6:28:57 PM10/29/13
to make...@googlegroups.com
Hi all,
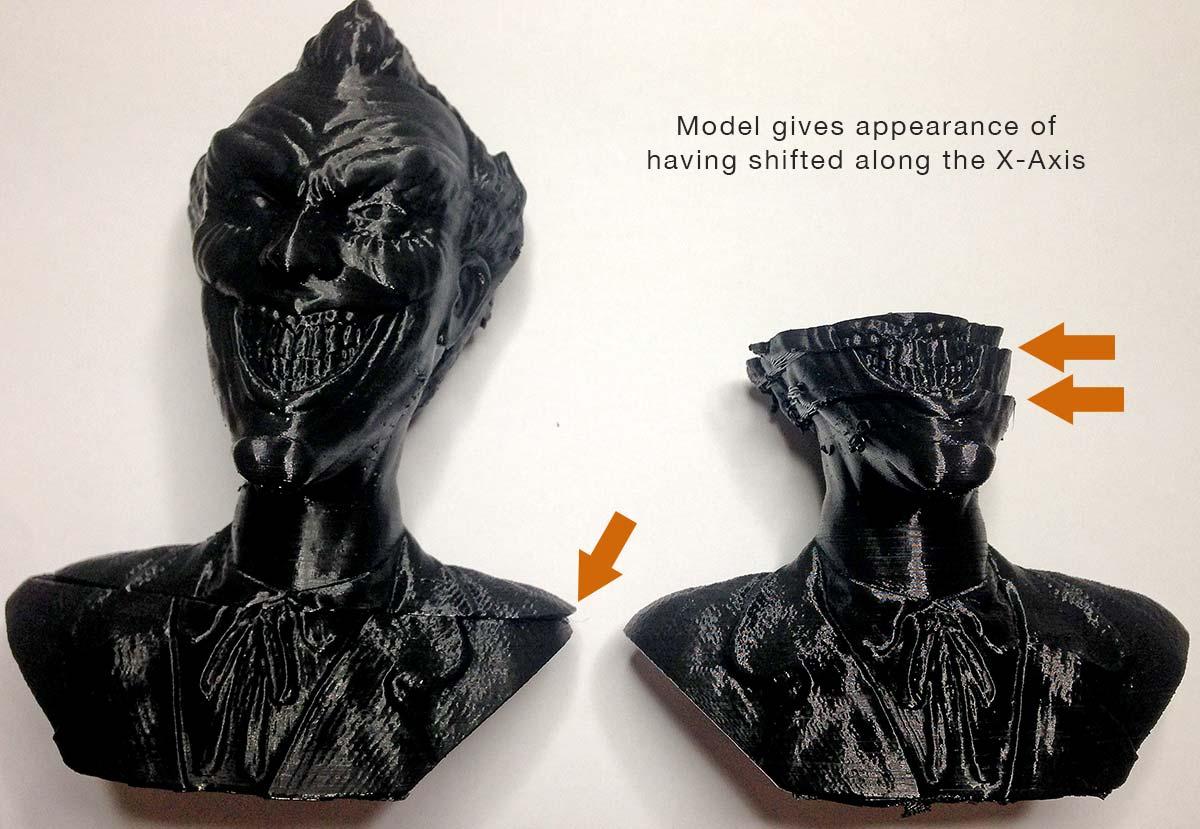
I have been experiencing an issue lately, whereby models seem to 'shift' along the X-Axis.
I've attached a photo so you can see what I mean. It's as though the extruder forgets its position, or skips position.
Some of my findings and troubleshooting so far:
- Issue experienced with both PLA and ABS.
- Initially thought it may be the model moving on the build plate, however after careful observation, this is not what is happening (model is firmly stuck).
- Bed height and level calibrated correctly, and extruder is not catching on the model when moving.
- The x-axis belt has been checked and is tightened appropriately. I have even marked the belt and pulley to make sure the belt wasn't skipping over teeth.
- The x-axis pulley has no play, and grub screw is firmly tightened.
- I have checked the x-axis motor mounting screws - these are also firmly tightened, and motor is not shifting.
- I have checked the g-code viewer (using creator 3D) after model has been sliced, and it does not have any aberrations in the sliced model.
- It appears to happen at random points on the model.
- Printing speed has been lowered to 3000mm/minute (50mm / sec).
Open to any thoughts or suggestions about what I can do to help mitigate this x-axis shifting.
Apart from this issue, the print quality is quite awesome - if I can figure out this shifting, I'll be a happy man :)
Appreciate the help!
Jonathon - 3D Tasmania

Rick Pollack
Oct 29, 2013, 6:31:45 PM10/29/13
to MakerGear
Rick
--
Rick Pollack
MakerGear
23632 Mercantile Rd.
Unit L (west side of building behind Daltile)
Beachwood, OH 44122
MakerGear 3D Printers are Designed & Built in Beachwood, Ohio, USARick Pollack
MakerGear
23632 Mercantile Rd.
Unit L (west side of building behind Daltile)
Beachwood, OH 44122
--
You received this message because you are subscribed to the Google Groups "MakerGear - Make Today, Change Tomorrow" group.
To unsubscribe from this group and stop receiving emails from it, send an email to makergear+...@googlegroups.com.
For more options, visit https://groups.google.com/groups/opt_out.
Jonathon - 3D Tasmania
Oct 29, 2013, 6:46:22 PM10/29/13
to make...@googlegroups.com
Thanks Rick - I've shot this through to support.
Cheers,
Jonathon

jimc
Oct 29, 2013, 8:08:51 PM10/29/13
to make...@googlegroups.com
ive had that happen a few times. not sure what it is. its not often however like your situation. in 2 mos of printing ive had it do it maybe 3 times. i have been on other forums for other printer manufacturers and the occasional shifting issue seems to pop up here and there on every brand of printer. whatever you or support find out please post it up. mine is far from an issue so i will leave well enough alone but if its a simple solution i can handle on my end i would do that.
Rick Pollack
Oct 29, 2013, 8:10:17 PM10/29/13
to MakerGear
an LCD controller can cause skipping...we have a firmware change to resolve it.
--
Rick Pollack
MakerGear
23632 Mercantile Rd.
Unit L (west side of building behind Daltile)
Beachwood, OH 44122
MakerGear 3D Printers are Designed & Built in Beachwood, Ohio, USARick Pollack
MakerGear
23632 Mercantile Rd.
Unit L (west side of building behind Daltile)
Beachwood, OH 44122
On Tue, Oct 29, 2013 at 8:08 PM, jimc <xtremekr...@gmail.com> wrote:
ive had that happen a few times. not sure what it is. its not often however like your situation. in 2 mos of printing ive had it do it maybe 3 times. i have been on other forums for other printer manufacturers and the occasional shifting issue seems to pop up here and there on every brand of printer. whatever you or support find out please post it up. mine is far from an issue so i will leave well enough alone but if its a simple solution i can handle on my end i would do that.
--
jimc
Oct 29, 2013, 8:15:44 PM10/29/13
to make...@googlegroups.com
thanks rick, i dont have an lcd though.

A. Elias
Oct 30, 2013, 9:28:17 AM10/30/13
to make...@googlegroups.com
I've experienced this too, about 1 out of every 8 prints exhibits this. Prints are in the 4 to 12 hours print time. Typically occurs around height of 50mm and above.
jimc
Oct 30, 2013, 1:45:37 PM10/30/13
to make...@googlegroups.com
Now that you mention it i only get it on taller prints as well. 50 and over is about right but its not 1 in 8 prints. Maybe 1 in 20 for me.

Joshua Wills
Oct 30, 2013, 1:55:52 PM10/30/13
to make...@googlegroups.com
Elias and jimc, do you have your M2s on a UPS?
On Wed, Oct 30, 2013 at 1:45 PM, jimc <xtremekr...@gmail.com> wrote:
Now that you mention it i only get it on taller prints as well. 50 and over is about right but its not 1 in 8 prints. Maybe 1 in 20 for me.
jimc
Oct 30, 2013, 2:47:09 PM10/30/13
to make...@googlegroups.com
Hi josh, i do not.
A. Elias
Oct 30, 2013, 3:54:19 PM10/30/13
to make...@googlegroups.com
negative, I feel the supplied power supplies could source power for a 1 second interruption.
I've tightened my belts since then and saw an improvement.
Joshua Wills
Oct 30, 2013, 3:58:09 PM10/30/13
to make...@googlegroups.com
Which style idler bearings do you have - the black nylon, or the silver bearings?
A. Elias
Oct 30, 2013, 4:26:54 PM10/30/13
to make...@googlegroups.com
you mean the bearing which the belts go around opposite the x and y steppers? I think mine are metal. M2 Assembly, page 8.
jimc
Oct 30, 2013, 4:51:13 PM10/30/13
to make...@googlegroups.com
I have ball bearings not bushings.
Jonathon - 3D Tasmania
Nov 1, 2013, 11:57:21 PM11/1/13
to make...@googlegroups.com
Quick update - i'm testing with cables to the X and Y motors swapped with each other, to see if the shift swaps to the Y axis.
Haven't noticed any shifting so far, but will continue to monitor, and post any updates here.
Jonathon - 3D Tasmania
Nov 21, 2013, 1:23:41 AM11/21/13
to make...@googlegroups.com
So I've been testing now for a few weeks with the cables swapped between motors.
I've noticed that the shifting along the X-axis still occurs, and hasn't followed the cable.
I also notice that this is also happening now on our second M2 (the newer one), perhaps more severely than the old one. I started some prints today that were repeatedly shifting during a print. I have yet to do a thorough inspection of machine (make sure all plugs are tight etc), but will do shortly.
I was also considering environmental factors in the issue, and was wondering if power could be a cause of this. Thinking about this though, I would expect it to shift along more than just the x-axis if it is an issue with power.
Open to any and all thoughts / suggestions about solving this ongoing issue!
Cheers,
Jonathon
jimc
Nov 21, 2013, 7:36:24 AM11/21/13
to make...@googlegroups.com
if it helps you narrow things down, as i said mine happens rarely but to fix another issue i did just pick up a new rambo and reinstalled the firmware. after the change it happened to me so between your changes and mine the only thing really left is the stepper motor. its funny, i have a vinyl cutter and occasionally it does the same thing. i have narrowed that down to the stepper as well. its like whatever inside that picks up or know its location has a split second glitch or bad connection and it jumps one step very fast. i have been there to see it happen on the cutter and the m2.
A. Elias
Nov 21, 2013, 8:39:05 AM11/21/13
to make...@googlegroups.com
Someone on another thread mentioned that the bearings in the slide could cause layer shifting.
I don't think the steppers have any type of feedback to the Rambo since I feel the Rambo is counting the number of steps it tells the motor to move relative to the homing position. If the belt slips one one time or the motor missed a step pulse then it throws off the whole the relative position count.
Thinking about this more, I'd be interested to see if you home the x-axis say after every 10 layers if it goes away. It would add time to your print but it would help confirm whether its the Rambo of the stepper, slide or belt. Kisslicer has a window which g-code could be added every n layers.
I ended up tightening my belt and everything seems to be OK for me.
jimc
Nov 21, 2013, 9:35:21 AM11/21/13
to make...@googlegroups.com
Yeah maybe it just counts and it assumes the motor did mive. I have no idea. You would think the motor would send something back saying it moved the step. Again i dont know and just guessing since i really dont know in detail how the steppers work. There is a circut board in them and with 4 or 5 wires running to it its certainly more involved than just supplying power to it. A feedback pulse or something maybe. There are other guys on this forum certainly more knowledgabe on the subject than me

Dale Reed
Nov 21, 2013, 2:32:45 PM11/21/13
to make...@googlegroups.com
Guys,
The basic operation of a stepper motor involves two coils. Putting current through both coils in a particular direction causes the shaft of the motor to align a certain way. By reversing the polarity of one winding, you cause the motor's shaft to rotate a step in one direction. If you then reverse the polarity in the OTHER winding, it will make the NEXT step in the same direction. By sequencing the polarity reversals, one coil then the other, then back, you get continuous rotation in a particular direction. And if you reverse the sequence of polarity reversals, you get rotation in the other direction:
+ +
+ -
- -
- +
+ + etc. might be clockwise. Then:
+ +
- +
- -
+ -
+ + etc. would be counterclockwise.
If you look at the diagram of the RAMBo board posted with the electronics instructions, you'll see the two "coils" of each stepper motor in the diagram.
It's just like holding two magnets with the north pole of one up against the south pole of the other. If you rotate one magnet, so that now, say, the south poles are together, the other magnet will rotate to bring its north pole against the south pole of the magnet you are holding.
There is NO position feedback (other than the home limit switch) for this system. The firmware simply counts the field reversals to track changes in positions. (With microstepping, it's more complicated than that, but you get the idea.)
This is how steppers are different from SERVO motors, where there IS a direct position measurement, and the rotation of the motor is controlled based on the position feedback. For a model airplane aileron or rudder or elevator servo, which rotates less than 360 degrees, position feedback is not that difficult. For an axis that moves several centimeters (and a LARGE number of motor rotations), the position feedback sensing is MUCH more expensive than counting pulses in a microcontroller. So that's why you have steppers in a desktop 3D printer.
So how might the shift occur?
1. The belt skps on the the toothed motor pulley. The controller sent the right steps and the motor turned the right amount, but the belt (and the extruder) are out of assumed position.
2. The microcontroller count gets corrupted. Something writes to the memory or resets the counter register. Not likely, but who knows? Firmware bug might cause this.
3. The microcontroller thinks it triggered the right pulse outputs, but it actually didn't. If something grabs the output or if an interrupt that is higher priority than pulse timing takes to long to process, the microcontroller section that is doing the pulse output may think pulses went out, but they really didn't. So the count changed, but the actual position did not. This seems like a possibility to me --- could be some event is happening, maybe on USB, that holds onto an interrupt or interferes with the pulse handling part of the code. This would require firmware debugging that is beyond the capabilities of most 3D printer users.
4. The microcontroller triggers its pulse outputs, but these don't get translated into polarity reversals by the RAMBo hardware. This could happen if the power switching components on the RAMBo board are overheating and do a shutdown to prevent component destruction. The motor gets NO current instead of positive or negative current, and doesn't turn when told.
5. The microcontroller triggers pulse outputs, the current swaps polarity, but the current isn't strong enough to give enough torque to move the axis. The controller assumes the axis moved but it didn't.
6. The G-code is corrupt. (But if you print the same G-code file and it works perfectly most of the time, that eliminates this one.)
#4 can be caused if the current setting in firmware is too high. (Plus the motor will get HOT.) #5 can be caused if the current setting in firmware is too low.
One thing that can help with #3 is to see if the issue occurs when printing from SD Card with the USB cable disconnected. Start a print from SD and pull the cable. If you don't get axis skips, you may have to print this way all the time. It could be a software, firmware or USB driver bug. Something is coming along and putting a load on the microcontroller and it's trying to do too many things at once.
So: Things it would help to know to determine the cause:
A: Are the X and Y stepper motors getting really hot?
B: Are these motors not getting warm? A stepper motor pulls current, even when sitting still holding position (think about the Z axis when you shut off power), so the motors SHOULD get warm.
C. Are you printing from software when this occurs, or are you printing from SD Card with the USB cable unplugged?
D. Have you lubricated the X and Y slides lately? Any crud on the rails? Have you oiled the belt idler (end opposite the motor)?
Hope this helps!
Dale
p.s.: It would be interesting to develop a 3D printer around a Parallax "Propeller" or other multi-core microcontroller to see if the independent cores, with particular functions assigned to them, would make it easier to avoid problems related to #3 above.... I'm not offering to write it --- I never wrote code for Propeller. I'm just wondering on my keyboard.... :-)

David Ras
Nov 21, 2013, 3:31:14 PM11/21/13
to make...@googlegroups.com
To check the bearings:
1. Ensure the head is cold and free of drips.
2. Place a finger under the nozzle.
3. Put just enough upward pressure to overcome the weight of the extruder, but not more than 1oz.
4. Wiggle up & down gently.
There should be no detectable play. Detectable play means at least 0.1mm of play. When my bearing went out, it was about 0.2mm of play.
You can use the same technique on the Y axis by pushing up on the side of the spider (not the build platform, it's on springs).
A wild guess...but the abrupt, large shift in the x-axis looks like the x-axis idler bearing or servo froze during a move.
Pull the belt off the servo and bearing, and check both of them in all 6 axis for any play. (up, down, left, right, fore, back).
Then check for freedom of rotation by rotating in one direction with your fingers while feeling for any sticky spots, grinding, bumping, etc. It should feel smooth.
Rotate in the other direction.
You can also visually inspect the bearings to make sure that they do not look like this:

-dr
jimc
Nov 21, 2013, 3:56:17 PM11/21/13
to make...@googlegroups.com
thats a great explanation dale. thanks for sharing your knowledge!!
as for the shifting, its done it since new and like i said it is rare as well as on my vinyl cutter but it does happen. as i said before too it doesnt appear to me a mg issue either. i have been on forums of every make and many people have had the issue. i am personally running from the sd card but not with the usb unplugged. bearings, belts and slides all working smoothly. no biggie really since it doesnt pose any kind of problem for me. curiosity mostly i guess.

{kind=link}
{kind=link}
Chris Huskamp
Nov 26, 2014, 11:36:57 PM11/26/14
to make...@googlegroups.com
Hey All,
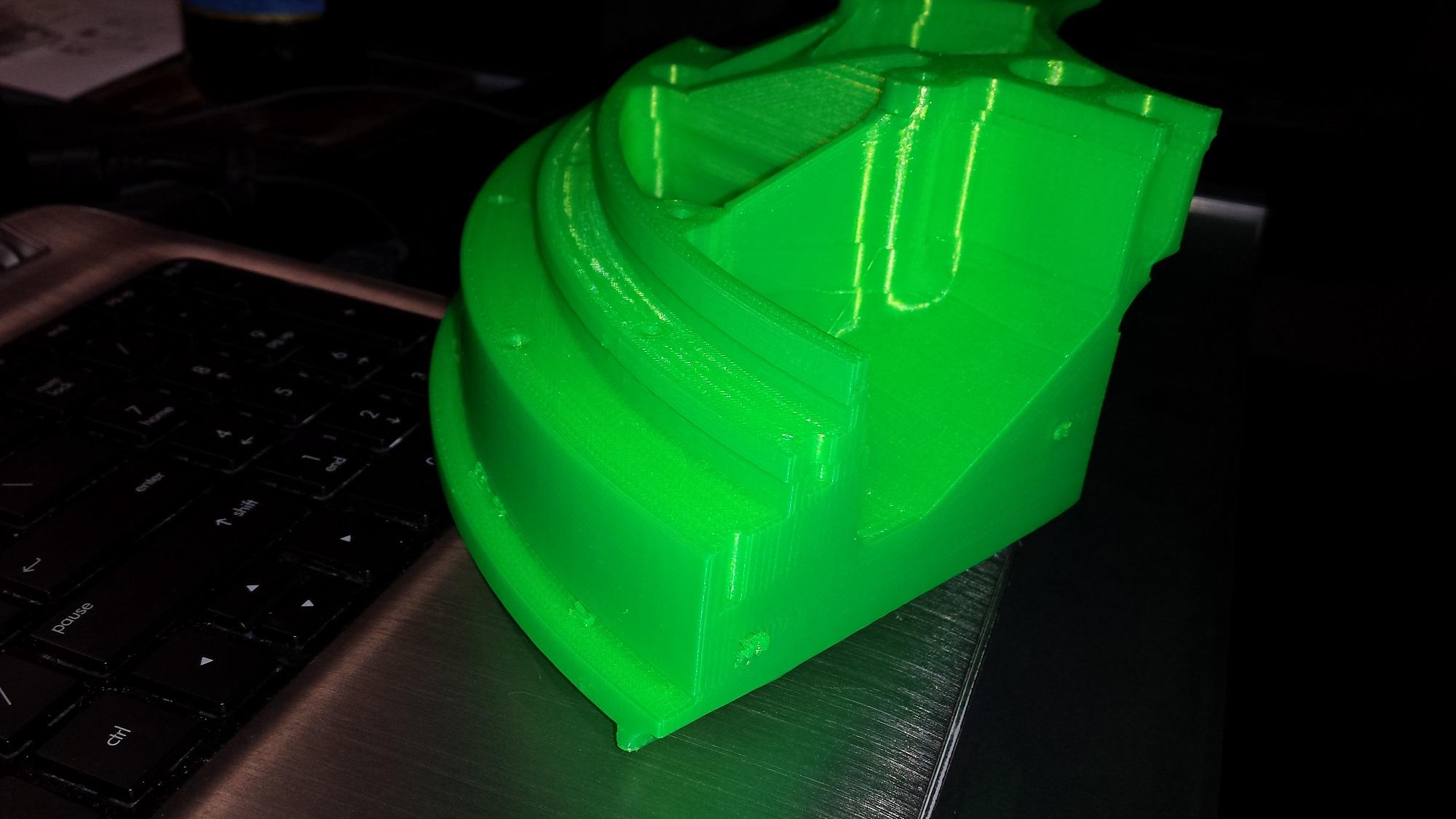
Has anyone addressed the shifting issue that is discussed here? I have it occurring on long build time (larger part) builds? I cannot find anything that identifies the source of the shift. Problem occurred on an overnight build four times (see pic.) I ran a tall, yet simple build right after and there was no issue. There is no LCD, the build was run from the SD and we are running PLA in this case. 18000.0 mm/min X/Y Movement Speed for those that would ask about a stepper losing counts.
Any suggestions are appreciated.
Thanks,
Chris
{kind=link}
Dale Reed
Nov 30, 2014, 6:07:47 PM11/30/14
to make...@googlegroups.com
Chris,
You'll get way more help if you post over on forum.makergear.com --- pretty much everybody has moved over there.
When you post, please include the "Factory" file (you may have to zip it in order to upload it) if you are using Simplify3D, or include the .STL (and maybe the gcode, if it's not too big.
Sometimes this happens when steppers lose count, but with the RAMBo and Marlin firmware, that doesn't happen too often, especially when printing from the SD card with the computer disconnected. (The SD card print can get interrupted by USB connect / disconnect actions, but on some of the firmware, this causes the printer to do a complete "power-up reset" and abort the print...)
If the shift is along the X axis, you might check and see if the extruder stepper motor is loose within the mount on the X carriage --- sometimes the nozzle will hit a part of the print that is sticking up and knock the whole mess out of alignment, rotating the extruder stepper within the mound. (Some people have actually broken the mount this way --- if you have some ABS, you'll probably want to print spares of the parts for the extruder drive, extruder motor mount, and many of the other printed parts.
Of course, check that the X belt (or the Y belt, if you are losing steps along that axis) is snug, not slipping in the belt clamp (mounted to the carriage or spider), the belt is not worn (probably not if yours is a new one), etc.
Main thing: post over on the MakerGear Forum, forum.mokergear.com , probably in the Technical Support board.
Hope we can help you!!!
Dale
Reply all
Reply to author
Forward
0 new messages