spacing between discrete returns of single pulse

Martin Isenburg
80518392.551392 67684464 24609196 55067 5 5 3

Lewis Graham
Lewis Graham
AirGon LLC, small UAS Solutions
GeoCue Group
9668 Madison Blvd., Suite 202
Madison, AL USA 35758
01-256-461-8289
--
Download LAStools at
http://lastools.org
http://rapidlasso.com
Be social with LAStools at
http://facebook.com/LAStools
http://twitter.com/LAStools
http://linkedin.com/groups/LAStools-4408378
Manage your settings at
http://groups.google.com/group/lastools/subscribe
Martin Isenburg
Sorry Lewis,
My bad. I forgot to mention that modern waveform digitizers - and i believe that includes the one in the VQ-480i - have currently a sampling rate of 1 GHz meaning that they record one sample per nano second resulting in a spacing of about 15 cm in air ...
Now that the 15 cm sample spacing is settled we can go back to the original question: Where could return spacings of less than 5, 10, or 15 cm in the first example possibly come from? And why does the online waveform processing in the second example generate return spacings of 20 to 25 cm ... ?
Martin

David Herries
Is there a chance your data is from dual pulse scanner and the data includes both pulses (Channels)? But online processing recognises this ?
Cheers
Dave
Sent from my Windows Phone
From: Martin Isenburg
Sent: 30/08/2015 4:14 a.m.
To: LAStools - efficient command line tools for LIDAR processing; PulseWaves - no pulse left behind
Subject: RE: [LAStools] spacing between discrete returns of single pulse
Martin Isenburg
----
Post to "PulseWaves" by email to pulse...@googlegroups.com
Unsubscribe by email to pulsewaves+...@googlegroups.com
Visit this group's message archives at http://pulsewaves.org
---
You received this message because you are subscribed to the Google Groups "PulseWaves - no pulse left behind" group.
To unsubscribe from this group and stop receiving emails from it, send an email to pulsewaves+...@googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
Martin Isenburg
Martin
Isn't it possible that waveform decomposition results in false data (discrete
ranging) if the parameters set for detecting 'echoes' are very optimistic? In such
a case (in which commission errors are frequent and perhaps tolerated) there probably
is a very short distance that one needs to allow.
In other words:
I suppose that target separation or discrete ranging has to do with how accurately
the outgoing waveform is sampled by some device with limited bandwidth properties,
the length and overall shape of the outgoing waveform, and by the properties of the
receiver to capture correctly the shape of the incoming photon surge. Here, the sampling rate
of the digitizer is only one parameter. With the amplitude data of both transmitted and received
waveforms stored - then comes the post-processing phase with
some parameters to be optimized with respect to true and false detections i.e. target
ranges. If commission errors (garbage) are tolerated, it is possible to have very short 'intra-
echo distances' by applying an optimistic parameter scenario.
Foreseeable real-world components and their properties (overall system response) and some confines
to how much garbage (false echoes) is tolerated can be used to derive some estimates. I'm
sure there are experts (in waveform post-processing) following the discussion who can
give such estimates and/or point out literature.
ilkka
Quoting Martin Isenburg <martin....@gmail.com>:
--
--
Post to "PulseWaves" by email to pulse...@googlegroups.com
Unsubscribe by email to pulsewaves+...@googlegroups.com
Visit this group's message archives at http://pulsewaves.org
---
You received this message because you are subscribed to the Google Groups "PulseWaves - no pulse left behind" group.
To unsubscribe from this group and stop receiving emails from it, send an email to pulsewaves+...@googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
Martin Isenburg
----
For the commercial, FW airborne topographic lidar systems I’m familiar with, it does not seem at all feasible that you could have target resolutions of 0-2 cm. An often-quoted rule of thumb is that the min target resolution (i.e., the smallest distance in the range direction between two different surfaces that you can resolve in the return from a single laser pulse) is half the pulse width times the speed of light, which, when you plug in published transmit pulse widths for commercial, airborne topo systems, typically gives min target resolutions of a few decimeters to a couple meters. That said, it has certainly been demonstrated that it is possible to achieve much better target resolutions than would be predicted by this simple rule of thumb when using FW lidar and various processing techniques (e.g., Jutzi and Stilla, 2006). With colleagues, Inseong Jeong, Rob Nowak and Brent Smith, I empirically investigated target resolution as a function of FW processing algorithm in a 2011 study (Parrish et al., 2011) and found—among other things—that we could do better than suggested by this rough rule of thumb with any good processing technique. But, with transmit pulse widths of a few ns to >10 ns, target resolutions of a few cm or less just do not seem feasible to me.
I’m not sure what’s going on with your data set, but there are any number of plausible explanations. For example, the data could have been collected by a different type of lidar system with a very short transmit pulse width + high speed digitizer and/or multiple receiver channels that each registered slightly different return locations for the same surface. Also, some of the detected returns could be erroneous or they could have been somehow duplicated in the output point cloud. In many FW processing algorithms, there are parameters that control the density of the output point cloud, with the caveat that higher density typically also increases the number of false returns. So, it's also possible that your data set was created by processing with some parameters set far outside their typical ranges.
Below are just a few references, sort of off the top of my head; there are many good papers on this topic, including some recent ones.
Regards,
-Chris
References:
Jutzi, B., and U. Stilla, 2006. Range determination with waveform recording laser systems using a Wiener Filter, ISPRS Journal of Photogrammetry and Remote Sensing, 61(2):95–107.
Wehr, A., 2009. LiDAR systems and calibration, Topographic Laser Ranging and Scanning: Principles and Processing (J. Shan and C.K. Toth, editors), CRC Press, Taylor and Francis Group, Boca Raton, Florida.
Parrish, C.E., I. Jeong, R.D. Nowak, and R.B. Smith, 2011. Empirical Comparison of Full-Waveform Lidar Algorithms: Range Extraction and Discrimination Performance. Photogrammetric Engineering & Remote Sensing, Vol. 77, No. 8, pp. 825-838.
On 29.08.2015 at 11:00 wrote Martin Isenburg:
...
> PS: Experimenting on some other data flown with a RIEGL VQ480i with online-waveform processing ...
...
> This looks more plausible as there are no returns closer than 20 cm. But
> I am also surprised that the online waveform decomposition can deliver
> discrete returns that are just over 20 cm apart (even though those are
> very infrequent) given that the waveform is only sampled once every
> 14.9896 cm. Maybe someone from RIEGL can chime in on that?
I am not sure if I got the gist of your question but I'll try some
explanation:
To start with, the VQ480 samples the waveforms with 500MHz nominally.
This is an equivalent of 30cm sample distance.
Second, the nominal (optical) pulse width is in the same order of length.
Finally the online target detection and estimation identifies peaks in
the received waveform with discrete returns and interpolates to range
readings between the sampling instances. Whether the target found is
indeed a discrete, well separated, target not only depends on the target
but also on the noise present during measurement. I would expect that
the "deviation" information you get with every pulse give a hint "how
well" the result corresponds to a separated target. Smaller deviation is
better fit.
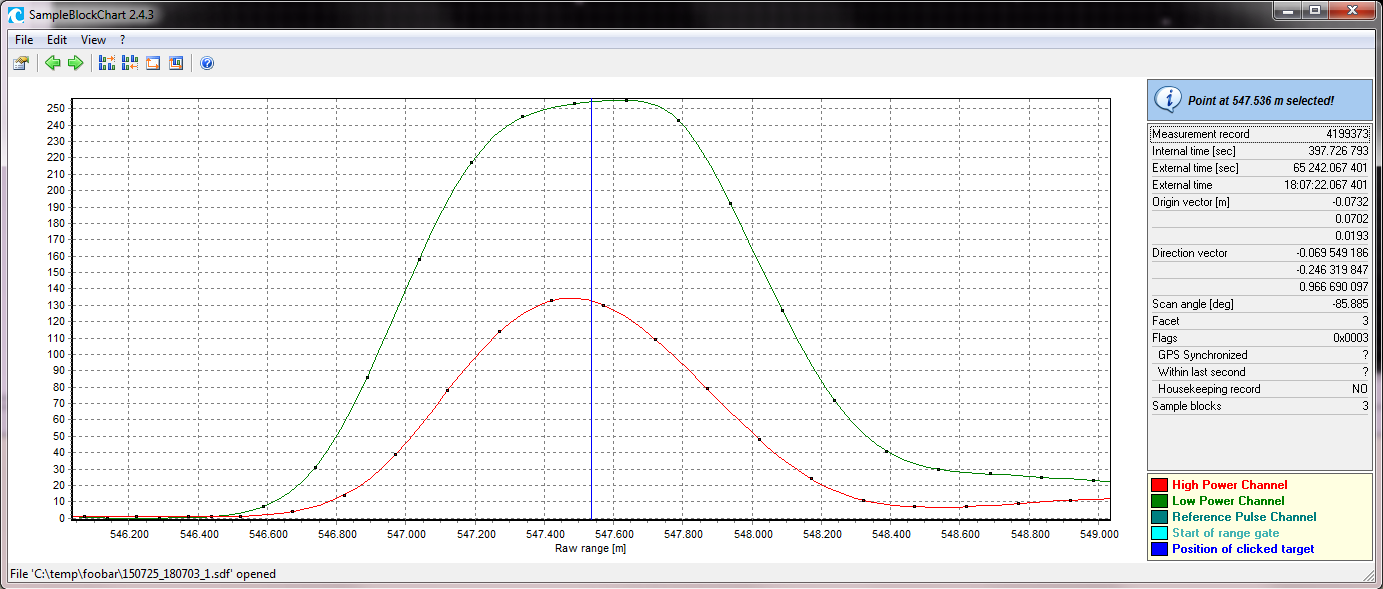
Possibly having a look at the waveform also could help to explain what
you got.
In the hope I addressed your question,
with best regards
Roland
--
DI Roland Schwarz
Sen. Eng. / SW Dev.
RIEGL LMS GmbH
Millenium Tower, Handelskai 94-96
A-1200 VIENNA, AUSTRIA
Phone: +43 2982 4211
Fax: +43 2982 4210
email: Roland....@riegl.co.at
www: http://www.riegl.com
_____________________________________________
RIEGL Laser Measurement Systems GmbH
Riedenburgstrasse 48, 3580 Horn, Austria
Registered at Landesgericht Krems, FN 40233 t
________________________________ Disclaimer _______________________________
This email and any files attached are intended for the addressee and may
contain information of a confidential nature. If you are not the intended
recipient, be aware that this email was sent to you in error and you should
not disclose, distribute, print, copy or make other use of this email or
its attachments. In that case please notify us by return email, and erase
all copies of the message and attachments. Thank you.
RIEGL reserves the right to monitor (and examine for viruses) all emails
and email attachments, both inbound and outbound. Email communications and
their attachments may not be secure or error- or virus- free and the com-
pany does not accept liability or responsibility for such matters or the
consequences thereof.

Evon Silvia

Michael Perdue
Default value: 1 m”
On Aug 31, 2015, at 2:58 PM, Evon Silvia <esi...@quantumspatial.com> wrote:(re-sent to the list)If you can track down the sensor used, I have seen in-pulse distances as low as 0-5 centimeters from the newer (ALS70, 80) Leica sensors when their "auto-select" option is disabled during extraction. As I understand it this occurs because every pulse is getting recorded simultaneously on two different receivers for each channel, and sometimes both receivers record the same return at two slightly different (1-10cm) ranges. The post-processing software usually has auto-select enabled to filter out these duplicate points, but not every user knows this and I've had a couple occasions where I needed to disable it and manually filter the duplicates.For Riegl sensors, I've seen this when the sensitivity is dialed up and we get a lot of noise. I'm sure there are other reasons... I need to get more familiar with the Riegl sensors, as the MTA zone discussion has been coming up a lot lately.Evon


Stephan Landtwing
The sensor used was a Trimble AX60 system - which at its core is a Riegl LMS-Q780. PRF used was 400 kHz, which results in a 266 kHz effective measurement rate. Due to air traffic control restrictions and terrain, various flying heights and associated Lidar power settings were used across the 2'000 sqkm project area. It is true that for SNR considerations - especially on low-reflectivity surfaces - we tend to chose the highest safe setting for a specific flight level.
Processing of the raw wave form data (SDF) was carried out using Riegl's RiAnalyze software in "standard" mode. As per Riegl's advice, no alterations to the "advanced" settings mentioned by Michael Perdue werde made. If this is the cause for the "anomalies" (which in now way degrade the usability of the final data set btw) discussed here, then Riegl needs to review the standard behavior of their software in my opinion.
Another potential source for phenomena like this that has surfaced repeatedly in data from this system is the treatment of false returns and air points from cloud/fog. As far as I understand it, RiAnalyze's MTA algorithm assigns one common MTA zone to all echos originating from an outgoing pulse. This assumption is not always true, especially if there are traces of clouds/dust/fog present dozens to hundreds of meters above ground level. Let's assume an outgoing pulse triggers two echos that are by chance exactly offset by the PRF's t0 distance (in the case of 400 kHz this is 2.5 ns * c = +/ 750 m). "Physically", these echos were generated in different MTA zones. But the MTA algorithm assigns the same MTA zone to both of them and consequently adds the same range ambiguity constant. The two georeferenced points in the point cloud will have the same coordinates...
Regards,
Stephan Landtwing
Martin Isenburg
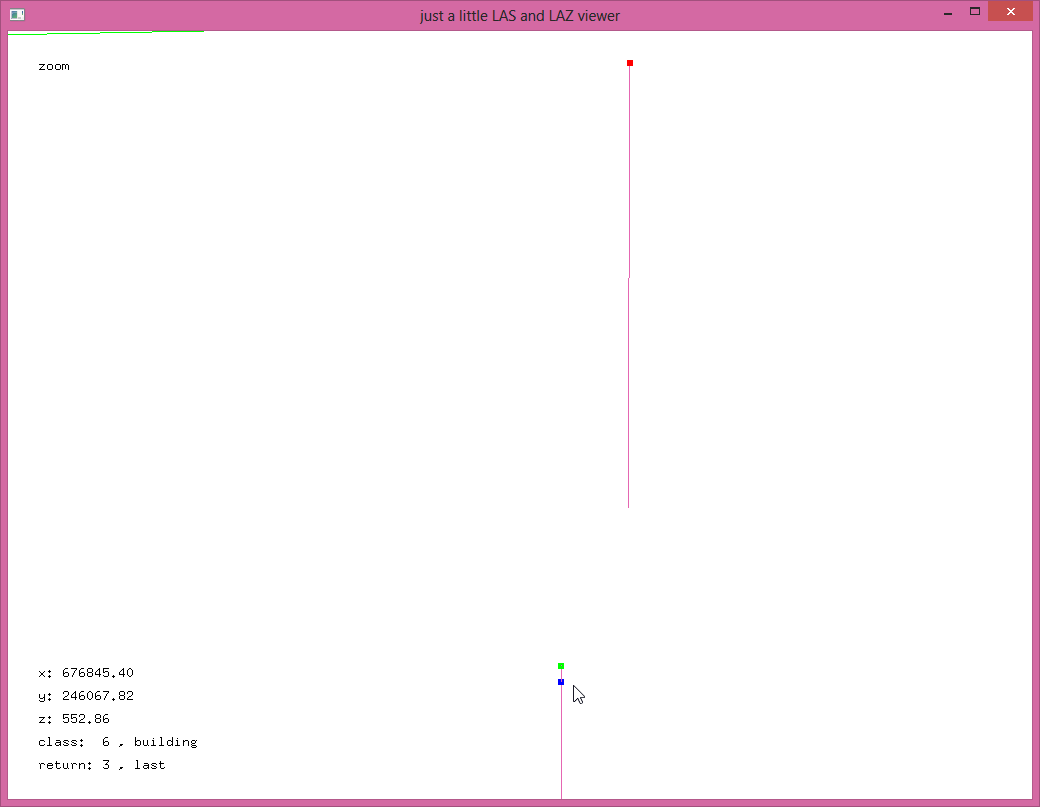
78474519.184197 676845.40 246067.82 552.86 3 3 62 DOUBLE
-keep_gps_time 78474519.881813 78474519.881815 ^
-keep_gps_time 80517535.921643 80517535.921645 ^
--
Martin Isenburg
Huh, this point debunks my theory on its own;
las2txt -i 6765_2460_cs.laz ^
-keep_gps_time 78474519.881813 78474519.881815 ^-parse txyzrni -stdout
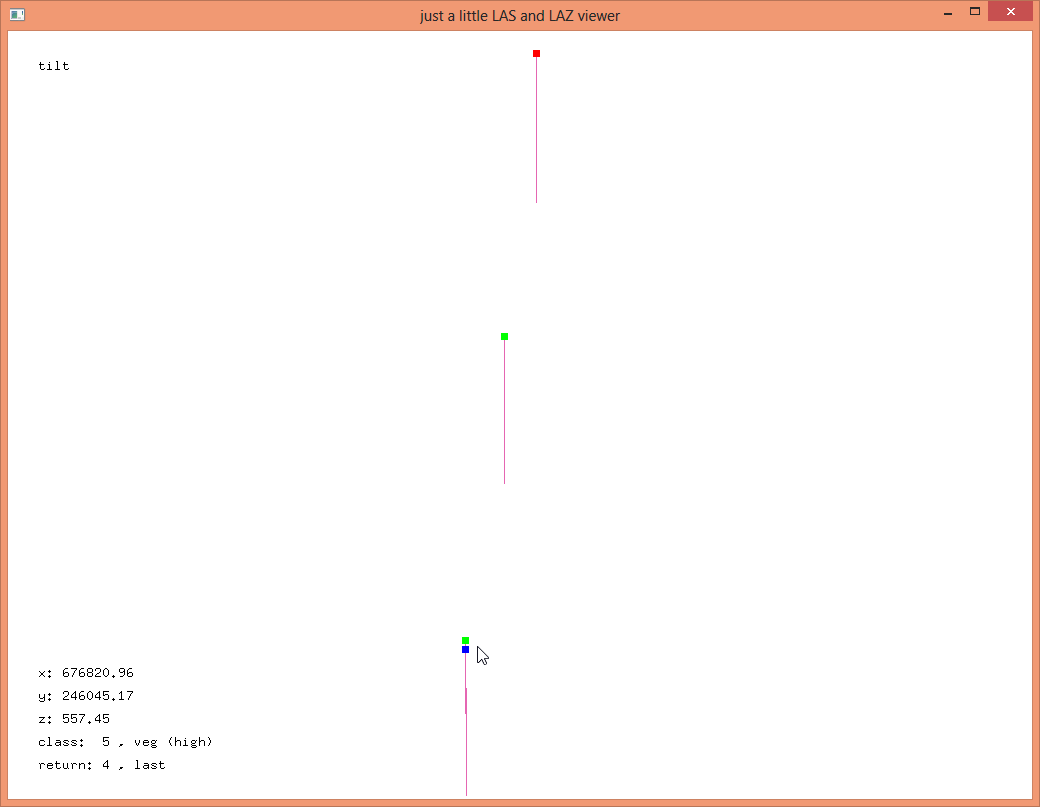
78474519.881814 676821.20 246045.40 559.44 1 4 27
78474519.881814 676821.09 246045.29 558.49 2 4 110
78474519.881814 676820.96 246045.18 557.48 3 4 29 DOUBLE
78474519.881814 676820.96 246045.17 557.45 4 4 76 DOUBLE
If any single target were to generate two returns (one from the high power channel and one from the low) it should have been return # 2 as it has the highest amplitude according to the data.
I’ve spent some time booting around in places where I don’t belong with Riegl’s software. There are settings that control ringing of the signal, detection thresholds, etc. I don’t fully understand what they all do, but at this point I have not found anything obvious that will allow the user to control the minimum separation between consecutive returns. So, outside of channel alignment, I’m at a loss.
I ran laspulse on the entire dataset that I’ve been exploring. The smallest separation I have seen in this dataset is in the 20-30cm range.
$ lastile -i *.laz -odir 'D:\temp\tiles' -tile_size 500 -olaz
$ cd tiles
$ lassort.exe -cores 8 -i *.laz -gps_time -odix _sorted –olaz
$ parallel laspulse -histo return_distance 0.1 -i {} 2> {.}.txt ::: *.laz
$ grep 'bin \[0.0,0.1) has' *.txt
$ grep 'bin \[0.1,0.2) has' *.txt
$ grep 'bin \[0.2,0.3) has' *.txt
516000_5539500_sorted.txt: bin [0.2,0.3) has 6
518000_5539500_sorted.txt: bin [0.2,0.3) has 9
621500_5444000_sorted.txt: bin [0.2,0.3) has 2
622500_5443500_sorted.txt: bin [0.2,0.3) has 2
627500_5438500_sorted.txt: bin [0.2,0.3) has 5
637000_5428500_sorted.txt: bin [0.2,0.3) has 1
This is in line with what was seen in the VQ480i scanner. But, to be honest, this is (slightly) smaller than I was expecting as I was under the (mis)understanding that the practical limit for target detection was 30cm. Where I got that number??? I can’t find any reference to a minimum target threshold in the documentation.
So back to the original question; How close *should* the returns of one pulse maximally be given a certain outgoing pulse width, a certain waveform sampling frequency, and a certain scanner with whatever hardware response time its receivers may have? With the data that I have seen so far (Q1560/Q780: 3ns pulse width, 1Ghz sampling rate);
>0.5m – Yup, Id accept that with no questions asked.
0.25 -> 0.5m OK, but I have questions.
0.0m -> 0.25m Admittedly, I have a lot to learn, but at this point I’m deeply skeptical; especially with values less that 10cm. Maybe there is a theoretical argument for it, but I’d like to see a dataset that demonstrates the ability to reliably differentiate known targets that were separated by a known distance before I buy into this one. Maybe the info is already out there. It looks like I need to find and read some of the literature that was referenced earlier in this thread.
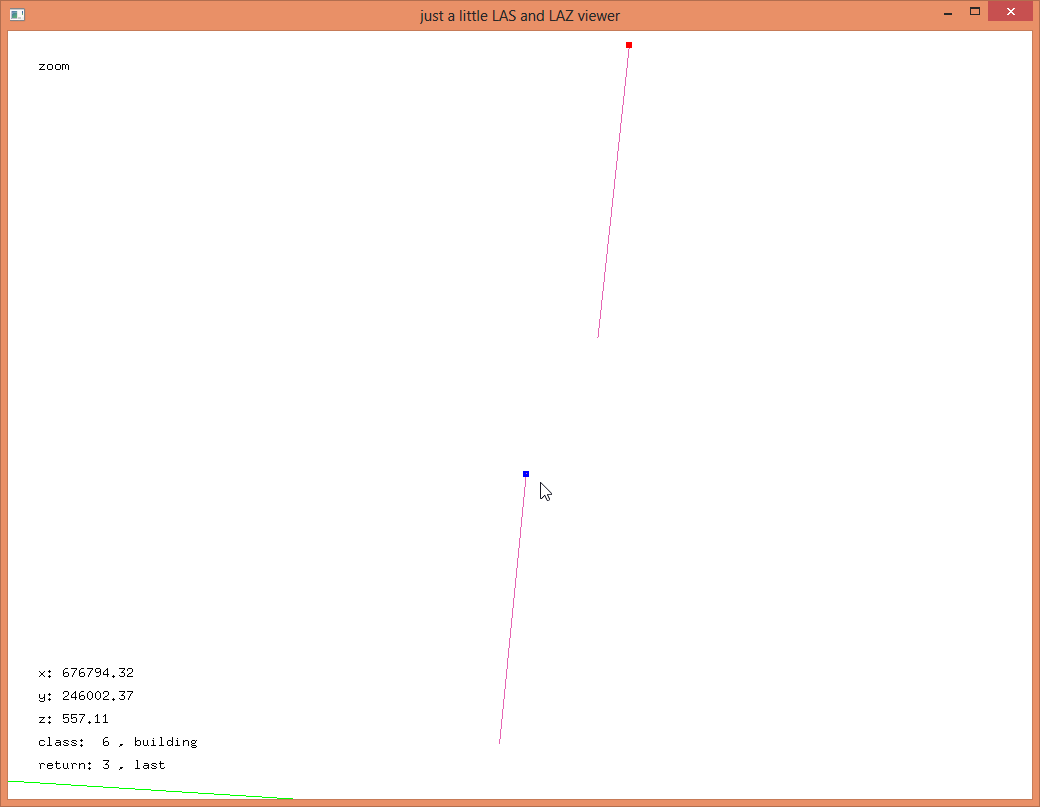
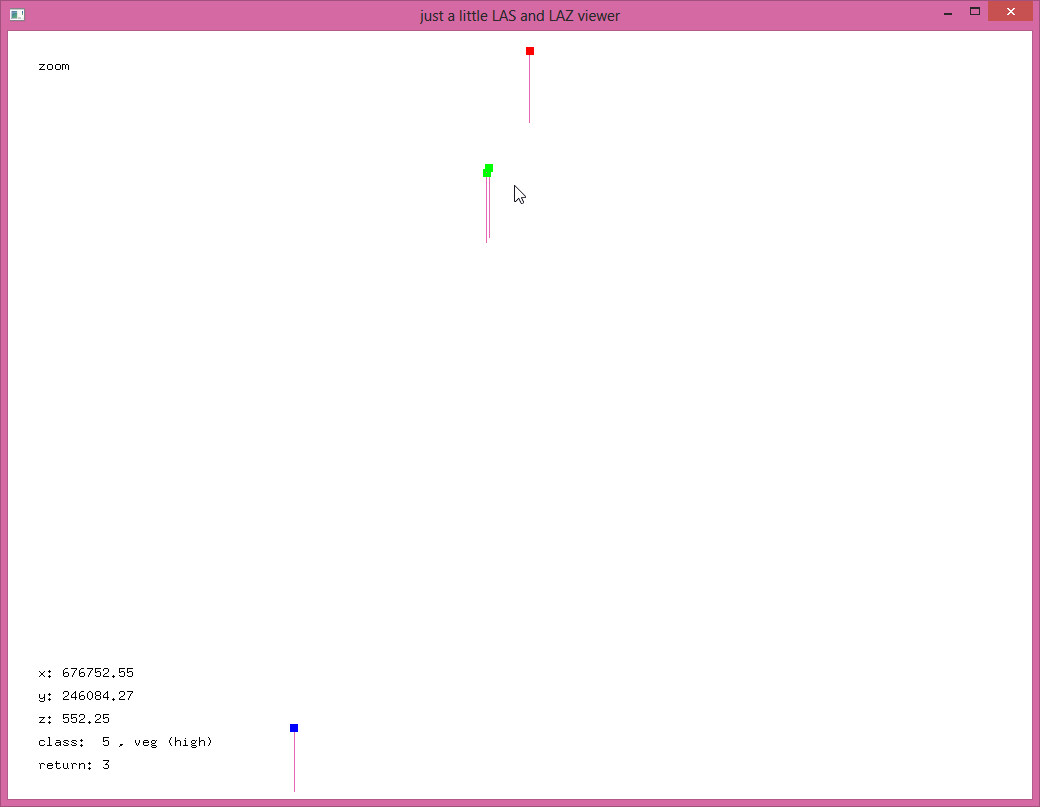
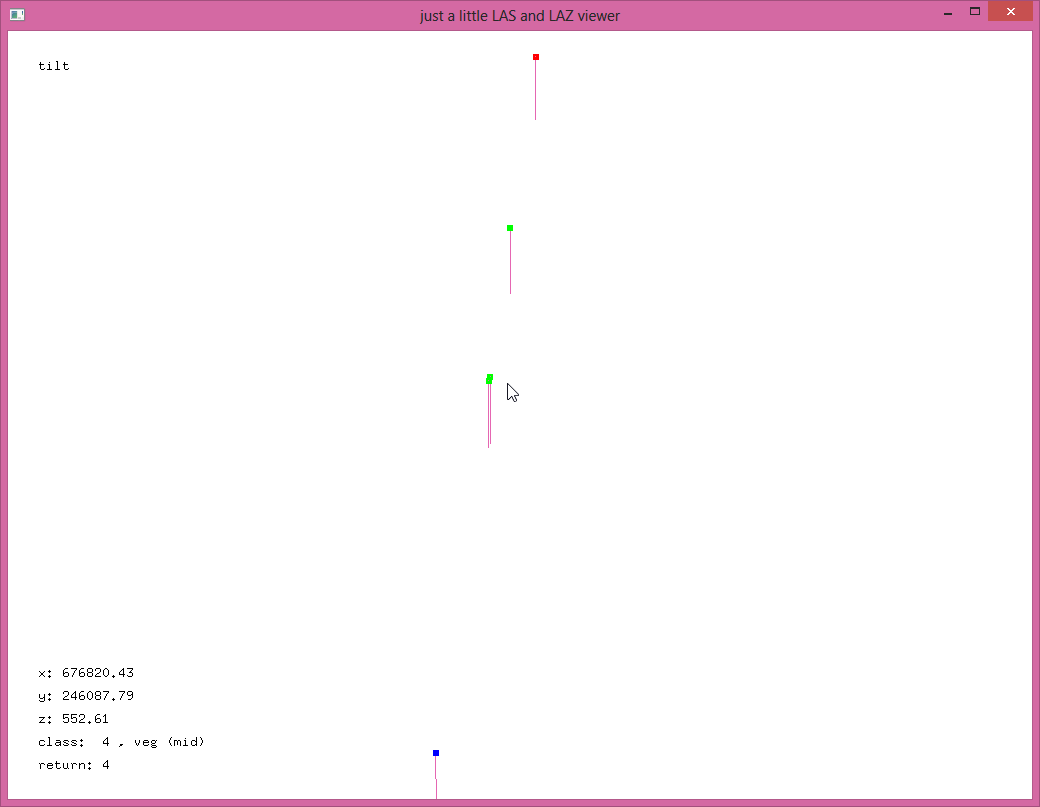
Now a question for the group:
I’ve identified places to look for closely spaced echos, but how do I isolate the individual returns that produce the small separation? IE I want to find the points identified as being closer than 0.3m in the above data so I can examine their associated waveform. Idea’s?
Cheers,
Mike
From: pulse...@googlegroups.com [mailto:pulse...@googlegroups.com] On Behalf Of Martin Isenburg
Sent: Tuesday, September 01, 2015 3:38 AM
To: LAStools - efficient command line tools for LIDAR processing <last...@googlegroups.com>
--
--
Post to "PulseWaves" by email to pulse...@googlegroups.com
Unsubscribe by email to pulsewaves+...@googlegroups.com
Visit this group's message archives at http://pulsewaves.org
---
You received this message because you are subscribed to the Google Groups "PulseWaves - no pulse left behind" group.
To unsubscribe from this group and stop receiving emails from it, send an email to pulsewaves+...@googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
Martin Isenburg
Martin Isenburg
and here comes PulseWaves to explain it all. There is amazing full waveform data from a tropical rainforest in Thailand that we've made available under an open license that was flown by Asian Aerospace Services and you can download the LAZ as well as the PLZ/WVZ files here:
http://rapidlasso.com/2014/12/16/beautiful-full-waveform-lidar-of-a-tropical-rainforest/
TreeMaps_UTM_47_Line13.laz
TreeMaps_UTM_47_Line13.plz
TreeMaps_UTM_47_Line13.wvz
Once you have the LAZ file you can start getting the return distance statistics:
>> lassort -i TreeMaps_UTM_47_Line13.laz -gps_time -o TM_sorted.laz
David Herries
We would like to have a play with LASpulse as these are some of the questions we have also been investigating.
Would appreciate having a play, please send through to either myself or Susana.
Thanks.
David Herries Interpine Group Ltd
Mobile: 021 43 5623 DDI: +64 7 350 3209 or Australia 0280113645 ext 721
Michael Perdue
I've been spending a lot of time looking at this and decided to take a different approach.
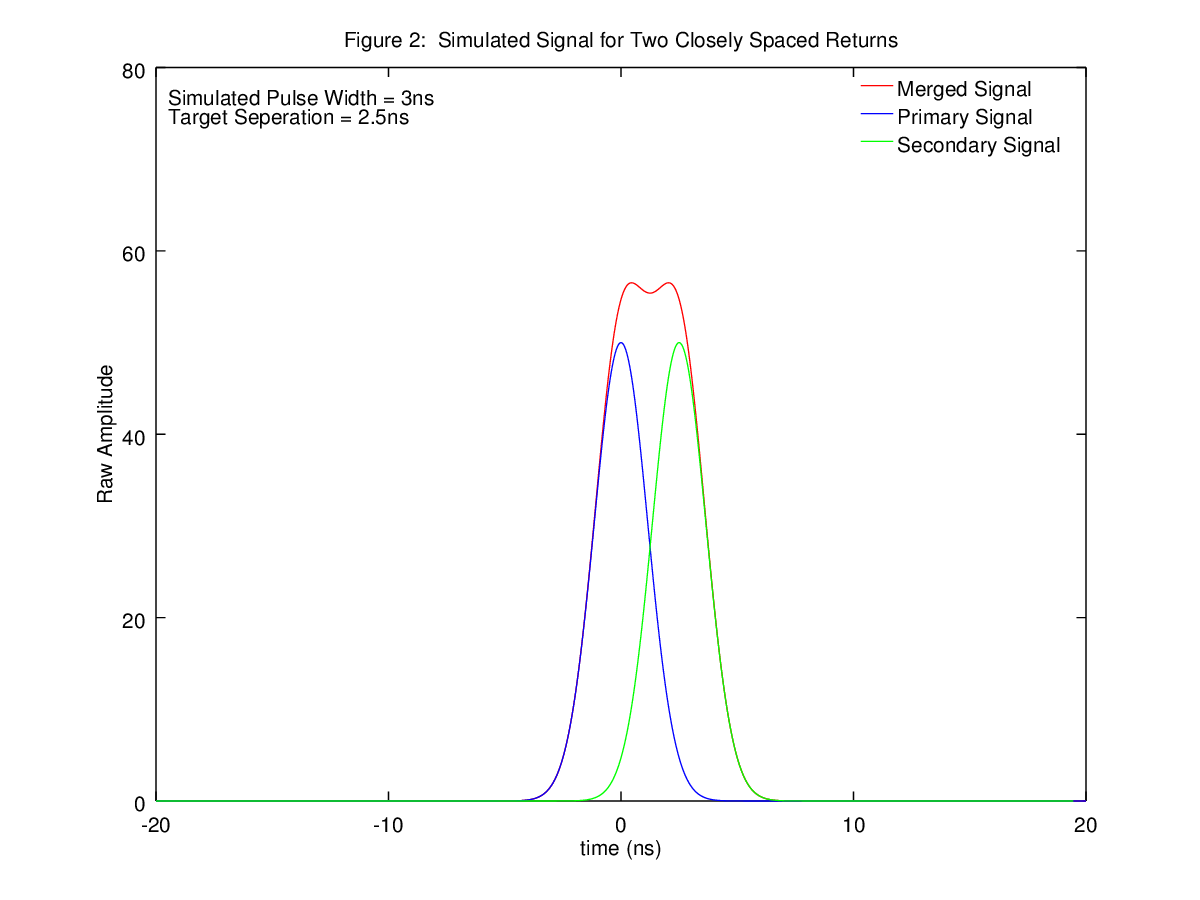
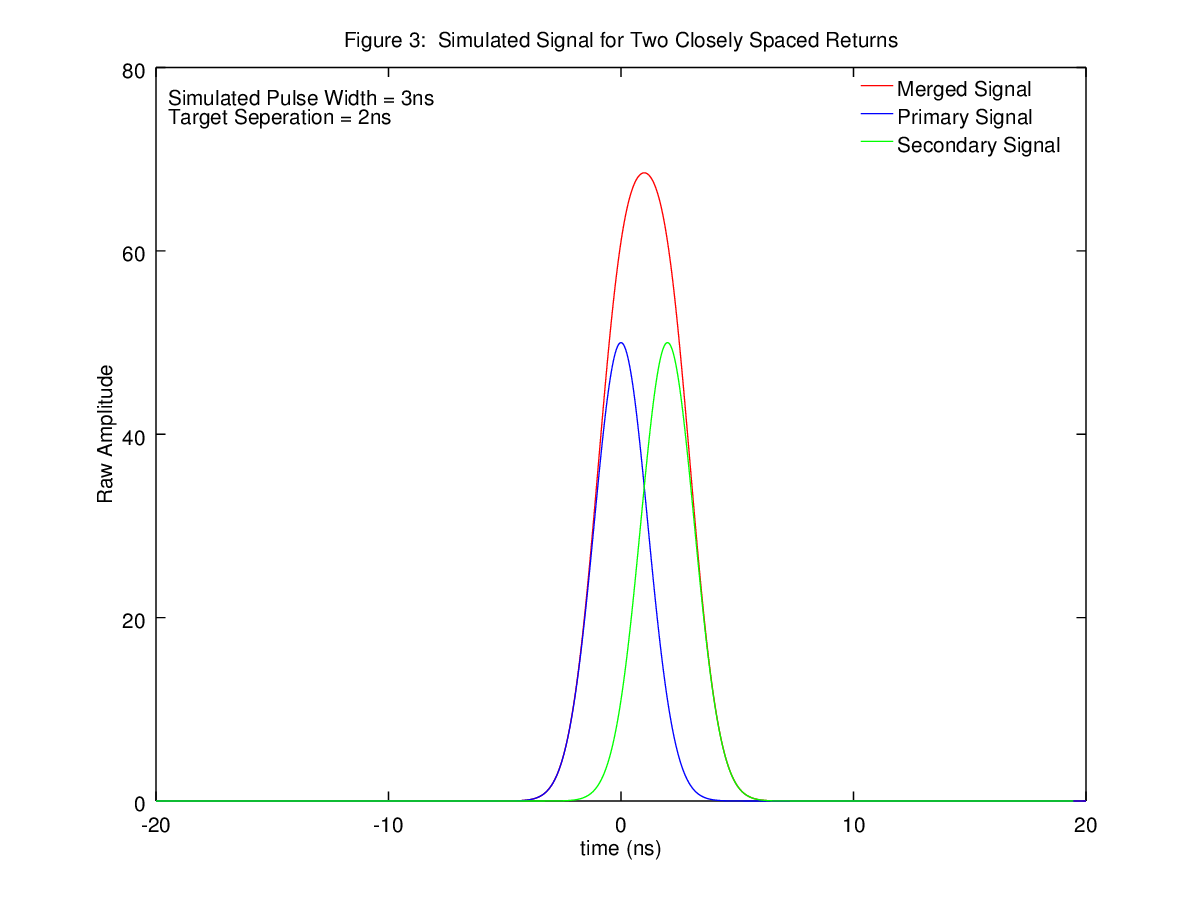
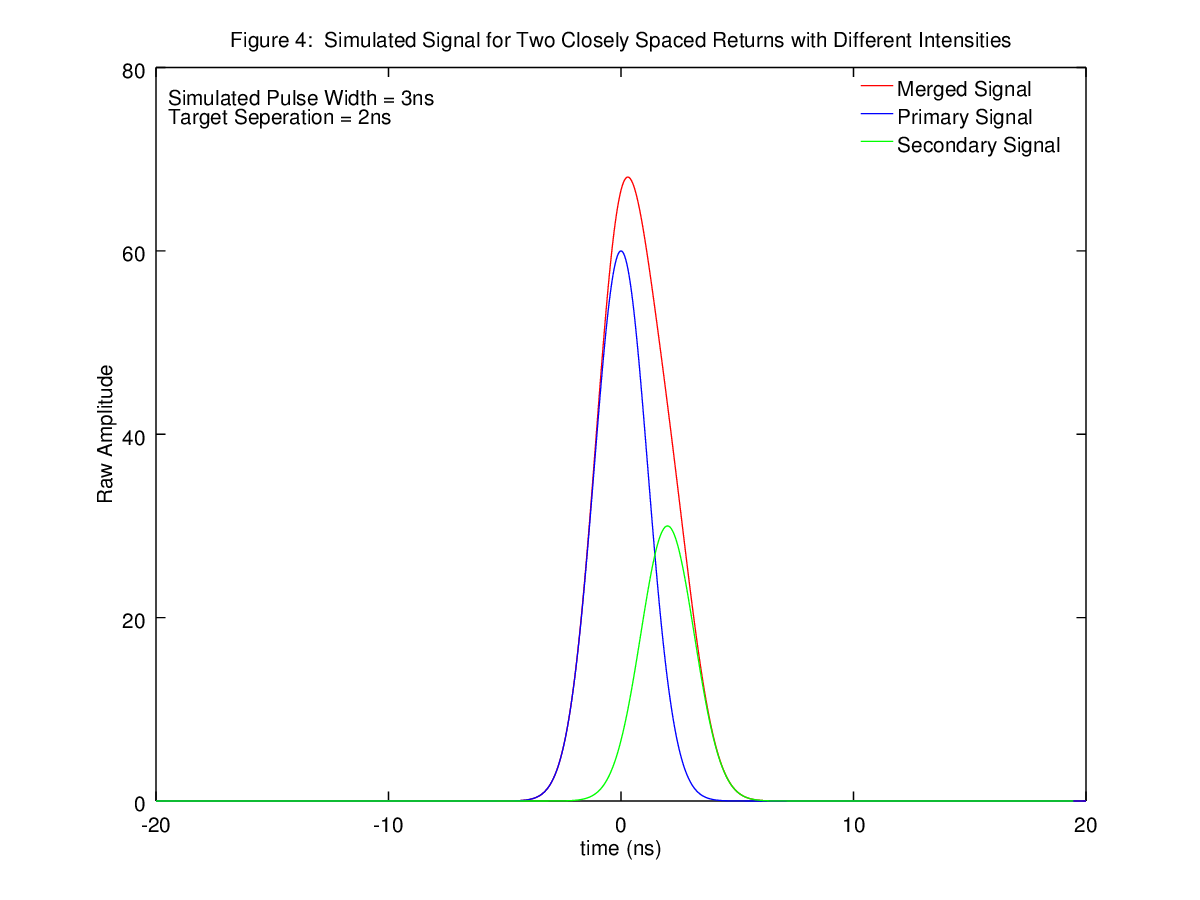
I’ve been creating synthetic pulses and visualizing them so I could wrap my head around what a “perfect” signal should look like. As explained to me, the published pulse width’s represent the width at the ½ max amplitude point. Using that definition and working under the assumption that reflected signals (flat target perpendicular to the pulse) should be Gaussian with the same pulse width as the outgoing pulse; I re-worked the equation for a Gaussian pulse and worked out a 3ns pulse width equates to 1.151ns standard deviation. Plotting two pulses 3ns apart with an amplitude of 50 for each pulse, results in Figure 1. Figure 2 and figure 3 illustrate 2.5ns and 2ns target separation respectively. At 3ns there are still two clearly defined peaks, but as the distance closes to 2ns separation the two distributions quickly merge to the point that the individual responses can’t be differentiated visually. So, on a system that has a 3ns pulse width, I would expect that by the time two pulses are closer than 2.5ns (~38cm) there shouldn’t be two distinguishable peaks present. I would also expect that trying to separate overlapping returns gets a lot more difficult as the interpulse distance closes.
Terje Mathisen
sampling rate of the highest frequency signal. :-)
Terje
--
- <Terje.M...@tmsw.no>
"almost all programming can be viewed as an exercise in caching"
Lewis Graham
One needs to sample at the Nyquist rate when the composition of the sampled signal is band-limited but unknown.
However, if one had a priori knowledge of the signal to be analyzed, Nyquist does not apply.
The great example is extracting Gold codes from the GPS signal.
Another example is extracting highway paint stripes from low spatial resolution LIDAR data (the paint stripe approaches a delta function in the cross-stripe direction).
Lewis Graham
GeoCue Group
9668 Madison Blvd., Suite 202
Madison, AL USA 35758
01-256-461-8289
www.geocue.com
www.LP360.com
Terrasolid sales and support
LP360 point cloud tools for ArcGIS
Small unmanned aerial systems hardware, processing software and services
Holder of FAA Section 333 sUAS exemption
Martin Isenburg
Hello Mike and readers,
Michael Perdue wrote:
> Having not read the journal article yet ...
The article does not contain technical details about how exactly the
gaussian decomposition is done in our sowftware. I just cited the
article with respect to the system waveform to give an explanation why
it is broader than the optical pulse width.
> ... is my interpretation correct that the FMM will be solved in a
> nonlinear least squares solution, and that the "detection" step
> finds the number of terms in the model ...
Basically this is what I tried to say.
> Is the "inflection point analysis" option in RiAnalyze a part of the "detection" ...
Yes it is.
>... I was playing around with turning it off and found that the majority
> of the pulses with spacing closer than 0.10m disappeared,
> including the double pulse that I examined in more detail.
This sounds reasonable.
Turning this parameter off will make the algorithm less sensitive. Take
it this way: If you put an small pulse onto a slope of a stronger one
and letting the smaller get continuously smaller, you will reach a point
where the relative maximum vanishes. You might still be able to detect
presence of this small "pulse" by looking at the derivatives. This is
what "inflection point analysis" means.
--
DI Roland Schwarz
Sen. Eng. / SW Dev.
RIEGL LMS GmbH
email: Roland....@riegl.co.at
www: http://www.riegl.com
_____________________________________________
RIEGL Laser Measurement Systems GmbH
Riedenburgstrasse 48, 3580 Horn, Austria
Registered at Landesgericht Krems, FN 40233 t
________________________________ Disclaimer _______________________________
This email and any files attached are intended for the addressee and may
contain information of a confidential nature. If you are not the intended
recipient, be aware that this email was sent to you in error and you should
not disclose, distribute, print, copy or make other use of this email or
its attachments. In that case please notify us by return email, and erase
all copies of the message and attachments. Thank you.
RIEGL reserves the right to monitor (and examine for viruses) all emails
and email attachments, both inbound and outbound. Email communications and
their attachments may not be secure or error- or virus- free and the com-
pany does not accept liability or responsibility for such matters or the
consequences thereof.

Anahita Khosravipour
Dear all,
I would like to share with you the answer that I got from Riegl company about this topic.
I think it is very useful explanation about the airborne laser scanner (VQ-480i) that I used for my research.
From: RIEGL LMS SUPPORT [mailto:sup...@riegl.com]
Sent: Wednesday, September 23, 2015 12:51 PM
To: Khosravipour, A. (ITC)
Subject: Re: [RIEGL#2015092210000075] Riegl - Contactform
Dear Anahita Khosravipour,
may I inform you that there is no document specifying the minimum distance of consecutive targets of the VQ-480i. As this minimum distance depends strongly on the amplitudes of both targets, the following numbers are to be seen as estimates for consecutive targets having
- nearly equal amplitudes and
- both amplitudes remaining below 25dB.
Under these conditions consecutive targets with a minimum distance of 1.5m can be seperated reliably. If the minimum distance reduced to 1m there is a still high probability for seperate detection of both targets. As soon as the target distance reduces below 1m the probability of detecting both targets reduces rather fast.
With kind regards,
Your RIEGL Support Team,
Andreas Hofbauer
--
When referring to this request, please always be sure the ticket number is included in the subject field.
--------------------------------------------------------------
Support Team
RIEGL Laser Measurement Systems GmbH
Riedenburgstrasse 48
A-3580 Horn, AUSTRIA
Phone : +43 2982 4211
Fax : +43 2982 4210
email : sup...@riegl.co.at
www : http://www.riegl.com
--------------------------------------------------------------
22.09.2015 14:20 - Mayer Michael schrieb:
-----Ursprüngliche Nachricht-----
Von: no-r...@example.com [mailto:no-r...@example.com]
Gesendet: Dienstag, 22. September 2015 13:49
An: RIEGL Laser Measurement Systems
Betreff: Riegl - Contactform
SALUTATION: Mrs.
FIRST_NAME: Anahita
LAST_NAME: Khosravipour
TITLE:
COMPANY:
University of Twente/faculty of Geo-Information Science and Earth Observation
(ITC)
FUNCTION_/_DEPARTMENT: Natural Resources Department
STREET: Hengelosestraat 99
POSTAL_CODE: 7514AE
CITY: Enschede
Hi,
I would like to ask you a question about VQ-480i (with online-waveform processing)
which I used it for my PhD research.
the question is to know about the shortest measurable distance between two
distinct returns from a emitted pulse.
in another word, each emitted pulse created 1 to 5 returns back, what is the
shortest distance between these returns? doses the VQ-480i has specific value for
that.
I need a document for that.
Thanks
Anahita

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Steve Smith
--