Skip to first unread message

Francesca Zammarano
Oct 14, 2013, 3:36:08 PM10/14/13
to k-12-f...@googlegroups.com
hi there,
i am trying have my students make a brush bot that is controlled via scratch and a makeymakey circuit board. i want my forth grade class to be able to turn their bots on and off and control directionality. you think this is possible? anyone done this that could give me feedback? thanks!
francesca zammarano
js tech
unis

Diego Fonstad
Oct 14, 2013, 4:54:37 PM10/14/13
to k-12-f...@googlegroups.com
Wow, that sounds cool but I have to admit my gut reaction is that you're mixing apples and oranges: Brushbots are by design very simple introductions to small "hack" robots... this raises the following potential issues with this project:
- Brush bots are hard to control directionally - (maybe reversing polarity? would that even change the direction?)... as I understand, they tend to go in the direction the brushes are bent...
- A Makey Makey is only an input interface (it is essentially an USB keyboard) so you still need something to control the output logic (arduino?)
- Assuming you've got a solution for the previous two issues, you are probably now tethering the brushbot to communicate with it... and those wires will probably impact its function.
If you want to introduced the Makey Makey and Scratch alongside brush bots, maybe you can have them design a "maze" or pinball like contraption with gates controlled by the Makey Makey and an Arduino (or alternatively you design it yourself and let them program against it). And then have them "race" their brush bots through it.
Please let me know what you end up doing and how it works out!
Diego
--
You received this message because you are subscribed to the Google Groups "K-12 Digital Fabrication Labs" group.
To unsubscribe from this group and stop receiving emails from it, send an email to k-12-fablabs...@googlegroups.com.
To post to this group, send email to k-12-f...@googlegroups.com.
For more options, visit https://groups.google.com/groups/opt_out.

Andrew
Oct 14, 2013, 5:45:13 PM10/14/13
to k-12-f...@googlegroups.com
I second most of Diego's points. The bristlebot, like the marker+cup artbot, is essentially a physical contraption designed to exploit small variation introduced by the offset motor.
Adding an on-off button to those device is often plenty of wiring/design challenge for elementary students.
Before we can think about "controlled via Scratch," you'd need to deeply explore different ways to exert any control over that system. Bending the bristles might work, but I can't think of a way to adjust that on an active bot. Maybe you could build a group bot, made of several bristle bots lashed together, and exert some control by turning different motors on or off, or somehow adjusting the voltage to each motor. You could also take a cue from aeronautics, and try to separate "thrust" from "control." Maybe a servo that changes the shape of the bot, twists some kind of rudder. There's a bunch of interesting things to try, but nothing that I know off hand will *work*.
Assuming you find something that will reliably control the movement of this now-freakish bot, then you're back to looking for ways to abstract that control. If you're still using simple DC motors, then only real control mechanism is something that adjust the circuit that powers the motors. Before looking at programable control, try some mechanical switches. There's a standard wall-crawler bot format (Taimyo vesion here: http://www.pololu.com/catalog/product/1694 ) that drives one side when the bumper switch is pressed, and then powers the opposite side when the switch is released, steering it back into the wall. Even if the switches aren't triggered by the environment, if you can get something rigged up, it provides a framework for the next step.
Programable control just means transferring that manipulation of voltage to the motors to a microcontroller. Diego is basically right, that surface MakeyMakey we work with is basically an input device. But it technically is a full Arduino and has the ability to have 6 PWM output pins (ref: http://www.slideshare.net/IndustrialDesignCenter/programming-arduino-makeymakey). That said, I don't know of a way to have those features triggered through Scratch. :)
Diego's last suggestion, of shifting your design focus to an environment rather than the bot, echoes the commercial strategy for the Hexbug version of the BristleBots (sold retail as the HexBugNANO Habitat: http://www.hexbug.com/hexbug-nano-habitat-set.html ) As a basic rule, bigger things are easier than smaller things. The MakeyMakey/Scratch pairing is well suited for keeping track of where bristlebots roam in an environment.
It's a much smaller leap to extend that task with servo-operated walls/gates than to move from the autonomous & chaotic vibration bots to a fully programable robot.
--andrew
Francesca Zammarano
Oct 15, 2013, 8:44:29 AM10/15/13
to k-12-f...@googlegroups.com
wow! thanks to all. will let you know but I think you answered my question. this is WAY above both my skills and my 4th graders. :) thanks!!!
f

Sylvia
Oct 15, 2013, 11:41:45 AM10/15/13
to k-12-f...@googlegroups.com
I think a simple prompt challenge of "can you make a brushbot go straight" would be appropriate for 4th graders. There are lots of things for them to try, from controlling the motor placement, to weighting it, or adding physical components like outriggers or fixed wheels, to restricting the environment. Even better, since they will likely want to see whose solution is "best" I'm pretty sure they would have to have a conversation exploring the mathematical concept of "straightness" - or what I would consider an engineering concept of "how straight is straight enough"?
(of course I'd tell them nothing besides the prompt.)
But this wouldn't involve any programming if that was the goal.
If programming is the goal, you could potentially do a Scratch challenge like "make a screen brushbot"
sylvia
Andrew
Oct 15, 2013, 11:47:31 AM10/15/13
to k-12-f...@googlegroups.com
Screen brushbots are an interesting question! How do you make a random walk, or something that's a bit more constrained like a skitter!
Small prompts rule!
--andrew
Francesca Zammarano
Oct 15, 2013, 3:06:47 PM10/15/13
to k-12-f...@googlegroups.com
Thanks Sylvia et al,
I have decided to remove the makeymakey from the equation and focus on the design process.
Identify problem: how can i make a mini bot that moves in a straight line?
Brainstorm: what does it mean to move? does it have to move in a straight line? how straight is straight enough? go from point a to b? etc.....
Design: collect materials for bot and for building circuit with motor, power source etc...
Build: (self explanatory)
Test and Evaluate: does the bot move? does it move the way you were hoping? what worked? what didn't work? if not, why? (balance, weight, esthetics... etc...)
Redesign: can you fix it? how? did that work?
Share: reflect on process and final outcome

Tim Cooper
Oct 15, 2013, 4:26:49 PM10/15/13
to k-12-f...@googlegroups.com
This sounds like a more doable plan with the brush bot. If the situation ever does arise about controlling things with Scratch by output - hack a WeDo or use Scratch4Arduino. Also, Scratch's cousin Snap can control more boards. I like the way this project uses the non-programming hacks in its new invention. Nice crowd sourcing of lesson plans, folks!
Signing out from the Great White North,
Tim Cooper
York School
Tim Cooper
Technology Teaching and Learning Coordinator | THE YORK SCHOOL


The York School's mission is to develop inquiring, knowledgeable and caring young people who are engaged citizens of the world. www.yorkschool.com
Disclaimer: This email is for the use of the named individual or entity and may contain confidential and privileged information. Views, opinions expressed reflect those of the author and not The York School.
Please consider the environment before printing this email.
Francesca Zammarano
Oct 17, 2013, 2:57:31 PM10/17/13
to k-12-f...@googlegroups.com
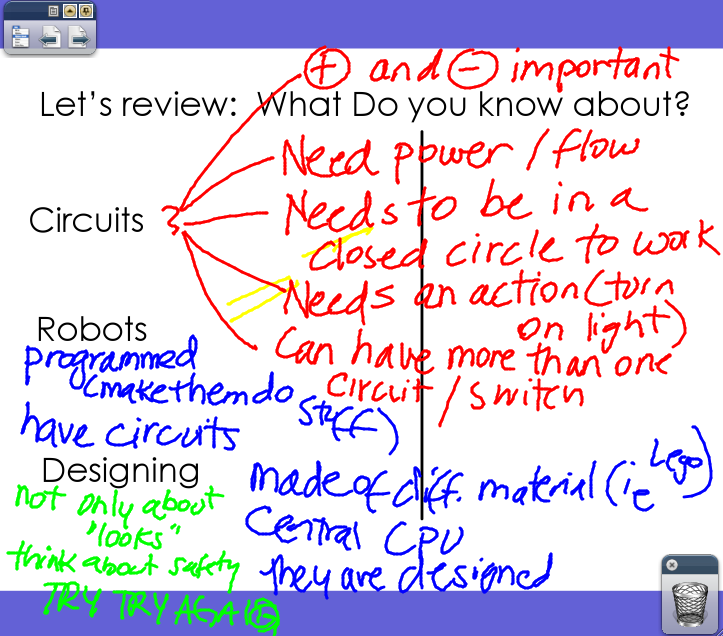
Update for those of you who helped and those of you who are interested. Started unit today by asking what J4 students already knew about Circuitry, Robots, and Design (see attached). Then I showed them ONE possible solution and opened the CoLaboratory to them.... it was AWESOME. Will update with final reflections and learnings when done.
- Francesca
Andrew
Oct 17, 2013, 3:06:13 PM10/17/13
to k-12-f...@googlegroups.com
Great to hear! Would you mind sharing again where you made the bulk order for the bristlebot motors?
--andrew
<J4 What do I know about....png>
Francesca Zammarano
Oct 17, 2013, 3:11:55 PM10/17/13
to k-12-f...@googlegroups.com
sure! here it is: http://www.aliexpress.com/
Sylvia
Oct 18, 2013, 11:46:57 AM10/18/13
to k-12-f...@googlegroups.com
I have to put credit where credit is due to Gary Stager who came up with the "can you make a brushbot go straight" at one of our teacher workshops with a teacher who was investigating the brushbots and wanted to know what could you do with them with kids that would expose some engineering or design principles.
Francesca Zammarano
Oct 18, 2013, 12:06:29 PM10/18/13
to k-12-f...@googlegroups.com
thanks GARY! looking forward to hearing you at FabLearn 2013 and Invent to Learn the following week!

{kind=link}
{kind=link}
Angi Chau
Oct 18, 2013, 11:41:20 PM10/18/13
to k-12-f...@googlegroups.com
Wow - thanks for this amazing thread! I love the idea of getting kids started with a simple project (something they can easily build that will give a satisfying result) and then layering on the complexity!
Since I've started leaving the lab open on Fridays after school for kids to come work on whatever they want, what I've found is that I keep running into the following situation: kid comes to the lab, looks through our stash of project books and Make magazines to find a project they want to work on, spots some super awesome-looking robot, gets super excited, runs over to show me the robot they want to build. Then I look at the materials list and realize that we don't have even half of the stuff required and I end up having to redirect them gently to more doable projects.
I think I'm going to stock up on toothbrushes and vibration motors so I can now redirect them to (or suggest in the first place!) a simple brushbot. Especially since it actually won't be so simple once I introduce the making-it-go-straight component!
--
Angi Chau, PhD
Director of Bourn Idea Lab, Faculty Advisor for Robotics
Castilleja School, 1310 Bryant Street, Palo Alto, CA 94301
650-470-7756 (direct)
ac...@castilleja.org
WOMEN LEARNING | WOMEN LEADING
Reply all
Reply to author
Forward
0 new messages