Is there a kinematic diagram for the hands somewhere?!?
361 views
Skip to first unread message

Muhammad Badr
Apr 25, 2014, 6:40:20 AM4/25/14
to inm...@googlegroups.com
Hi Gael
I'm using the hand with some student's projects in the university ( I think I said that before :-) )
I'm writing a paper about using the hand for academic purposes, to do some motion analysis I need the dimensions of the hand in terms of lengths of links and joints motion range
I tried to measure the links myself and made the simple diagram below (values not shown) but I would rather have the original dimensions as you made them, that would make the simulation much more accurate
Let me know if you have such dimensions, I'll share my attempts anyway as soon as I finish writing the paper if someone is interested
Regards
Muhammad
I'm using the hand with some student's projects in the university ( I think I said that before :-) )
I'm writing a paper about using the hand for academic purposes, to do some motion analysis I need the dimensions of the hand in terms of lengths of links and joints motion range
I tried to measure the links myself and made the simple diagram below (values not shown) but I would rather have the original dimensions as you made them, that would make the simulation much more accurate
Let me know if you have such dimensions, I'll share my attempts anyway as soon as I finish writing the paper if someone is interested
Regards
Muhammad


gael langevin
Apr 27, 2014, 6:12:48 AM4/27/14
to Muhammad Badr, inm...@googlegroups.com
Hi Muhammad,
I will see if I can get something with dimensions in my Blender files. I know I did that sometime ago, but I don't remember how to, so I will seek a little.
--
You received this message because you are subscribed to the Google Groups "InMoov" group.
To unsubscribe from this group and stop receiving emails from it, send an email to inmoov+un...@googlegroups.com.
To post to this group, send email to inm...@googlegroups.com.
Visit this group at http://groups.google.com/group/inmoov.
For more options, visit https://groups.google.com/d/optout.
gael langevin
Apr 27, 2014, 6:42:23 PM4/27/14
to Muhammad Badr, inm...@googlegroups.com
Hi Muhammad,
I made these measurements between each joints. I also added angles measurements.It took me a while because the new version of Blender I'm using hadn't the measurement pluggin and I searched into the software for a long time trying to remember how to do that. Turned out I had to re-install the pluggin...
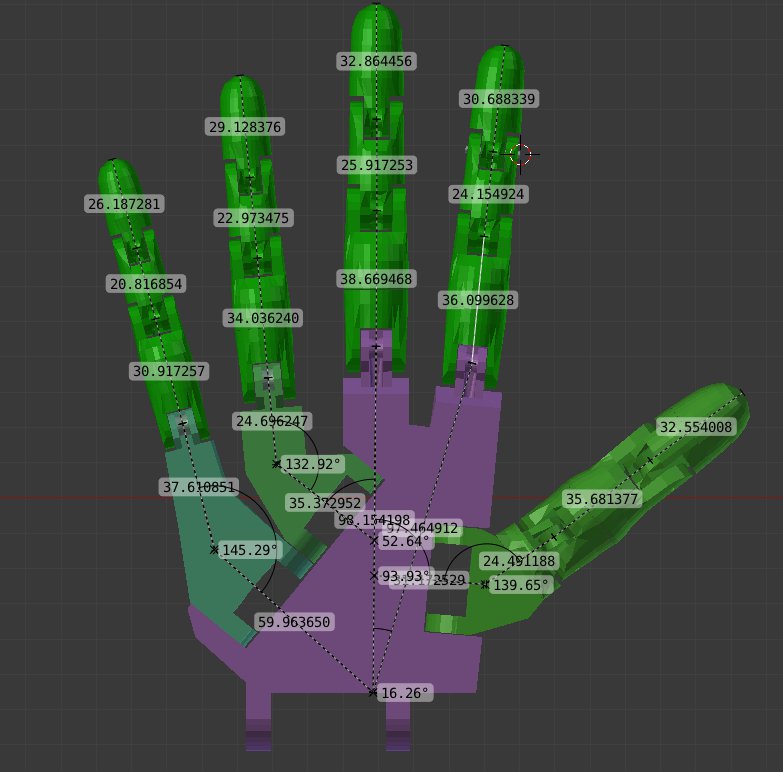
Hope this can help.
Muhammad Badr
Apr 28, 2014, 7:08:01 AM4/28/14
to inm...@googlegroups.com, Muhammad Badr
Thanks a lot, this is very good
I plan to use the dimensions for some grasp analysis and simulations on matlab, I'll post my results when I'm done
Thanks again
Regards
Muhammad
I plan to use the dimensions for some grasp analysis and simulations on matlab, I'll post my results when I'm done
Thanks again
Regards
Muhammad
Muhammad Badr
Apr 28, 2014, 7:32:34 AM4/28/14
to inm...@googlegroups.com
Hi Gael
There are just a few dimensions missing, I'd much appreciate if you add those as well;
There are just a few dimensions missing, I'd much appreciate if you add those as well;
- the angle between the centreline of the pinky and the line extending from the base (wrist) to the pinky base
- the distances between the wrist base and the junctions to the base of thumb and base of ring finger
Thanks in advance
Regards
Muhammad
gael langevin
Apr 28, 2014, 5:27:48 PM4/28/14
to Muhammad Badr, inm...@googlegroups.com
Hi Muhammad,
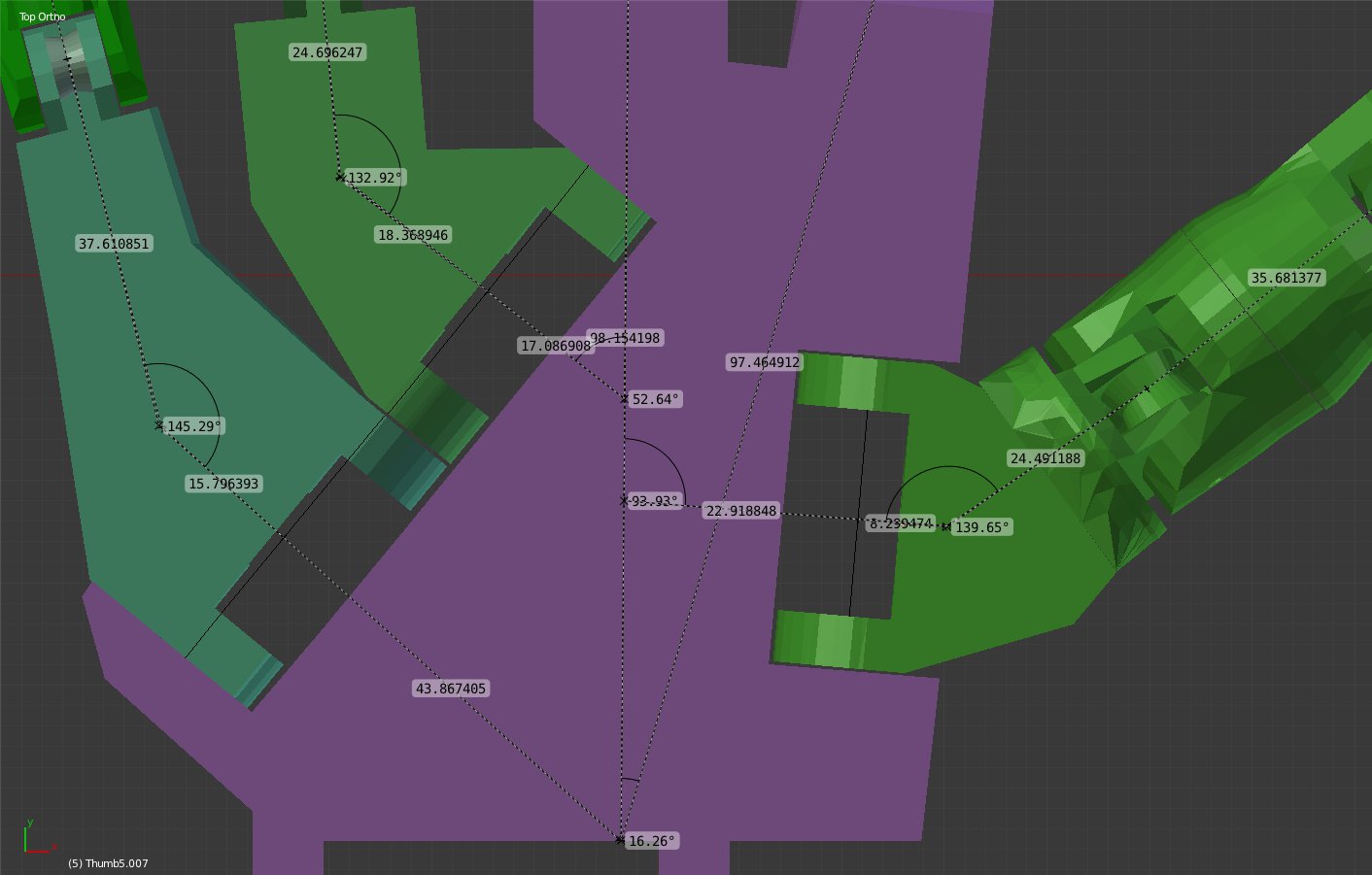
Here are the three extra measurements needed. I think, because this is not clear to me:"the angle between the centreline of the pinky and the line extending from the base (wrist) to the pinky base"
I think you meant:
"the angle between the centreline of the pinky and the line extending from the base (wrist) to the majeure base"
You have used two on three wishes, you may do one last wish."the angle between the centreline of the pinky and the line extending from the base (wrist) to the majeure base"
:)
Gael

--
Muhammad Badr
May 24, 2014, 11:56:59 AM5/24/14
to inm...@googlegroups.com, Muhammad Badr
Thanks a lot Gael
Sorry it took me a month to reply :-)
"You have used two on three wishes, you may do one last wish."
Hey, that's not fair, you know what they say; with great contribution comes great responsibility, don't expect me to settle for 3 wishes, I'm only starting
But since you're obviously busy, then I won't say that I meant the thumb not the pinky :-)
I've used the dimensions and images you provide and coreldraw to estimate the measurements I needed, and measured the angle ranges using a printed hand
I modeled the hand into the toolbox here, the results I obtained so far shows that the hand has a coverage of about 3.25% of the sampled human hand dataset, assuming all joints move together ( which seems to me not to always be the case )
I've modified one of the hands to use 2 motors per finger, according to simulation this would increase the coverage to 8.52%, I'm still working on this and from how interesting it seems I'll probably be using your robot a lot in the future
If this kind of work is interesting to you or anyone else I'll be updating you on my progress, I also plan to work on grasping once I get the hand working well, we also get many undergraduate students interested in robot legs. However I got to warm you not to expect much, progress in the academic domain tends to be slow
Thanks again
Regards
Muhammad Badr





gael langevin
May 26, 2014, 3:32:56 AM5/26/14
to Muhammad Badr, inm...@googlegroups.com
It's interesting to find out the InMoov hand has a 3.25 coverage compared to the human hand. Of course, I will be interested to foloow your progress on this, and I'm sure I'm not the only one.
I really wonder what kind of device/software you use to make those comparison. Not that I would use it or try to use it, because I seriously lack of time for that, but simply because I'm surprised there is things like that exist for every one to use.Muhammad Badr
May 29, 2014, 1:09:51 PM5/29/14
to inm...@googlegroups.com, Muhammad Badr
I'm using a method developed by a group of academics that compares all the positions that fingertips of a robot hand can reach to those reachable by human hands during grasping, to be more accurate I'm using a MATLAB toolbox they provided, MATLAB is a programming language for complex mathematics
You can find more information on the website http://grasp.xief.net/ if you want
Regards
Muhammad
gael langevin
May 29, 2014, 3:51:20 PM5/29/14
to Muhammad Badr, inm...@googlegroups.com
Thanks for the info and link.
Gael--
You received this message because you are subscribed to the Google Groups "InMoov" group.

josie...@gmail.com
May 2, 2016, 4:12:12 AM5/2/16
to InMoov
Hi Muhammad,
I am interested in your project as I am also looking at using the inMoov hand for grasp analysis. I am just wondering did you use the SynGrasp toolbox on matlab? It would be great to see your project and any information you have, I've built the arm and I'm looking to combine it with a vision control system and use it to grasp a delicate object, such as an egg.
Kind Regards,
Josie
Muhammad Badr
May 3, 2016, 9:59:32 AM5/3/16
to InMoov
Hi Josie
Thanks for expressing your interest in my project. I have used SynGrasp for some time but I did not like the way it approximates the hand surface geometry, partially for visualisation reasons but mainly due to inaccurate contact detection. In fact most of the time the fingertips "penetrate" the grasped object with no way of controlling the allowed penetration depth, which is probably more important when you're simulating delicate objects.
For these and other reasons, I have wrote my own grasp simulation toolbox for MATLAB, which I later used to analyse the InMoov hand. It does not cover the same functions as SynGrasp (particularly the parts related to synergies) and I am not satisfied enough with the performance enough to publish it. However I also modelled the InMoov hand in SynGrasp, I could try to dig it up if you want it though it is not exactly a comprehensive model as it was abandoned halfway through.
Do you plan to do such analysis/work in an academic project or a personal one?
Best regards
Muhammad
josie...@gmail.com
May 5, 2016, 7:47:19 AM5/5/16
to InMoov
Hi Muhammad,
I'd be really interested to see what you you've done.
Kind Regards,
Josie.
Reply all
Reply to author
Forward
0 new messages