Possible link between EKF and thermal overload -> Pixhawk crash

mroberts

Jonathan Challinger
--
You received this message because you are subscribed to the Google Groups "drones-discuss" group.
To unsubscribe from this group and stop receiving emails from it, send an email to drones-discus...@googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
Jonathan Challinger
mroberts
mroberts

Andrew Tridgell
I just wanted to correct a misconception. Enabling EKF does not change
the CPU load on a Pixhawk. On all releases since we added the EKF it is
running all the time. The DCM code is also running all the time. The
only difference is which of the two sets of outputs is actually used.
I'm not saying that there is no thermal problem (I can't prove that one
way or the other yet). But I can tell you that enabling the EKF won't
make a significant difference in the thermal behaviour of the CPU.
I've started looking through the logs files from you and Tom. I don't
have a lot of time right now, but I'll have a look as I can.
Here are some things I noticed in your "lost 10.BIN" file:
- the servo rail voltage in averaging about 5.9V, and is fluctuating
above and below 5.8V. That is interesting, as 5.8V is the critical
transition voltage for the Pixhawk using the IO servo rail as a
backup power supply for the FMU board. As long as the main 3DR brick
power remains solid that shouldn't matter, but I thought I'd note it
as it is unusual, and when looking at bugs like this anything unusual
is worth noting. (see the POWR.Vservo graph)
- the barometer temperature is indeed rising, but not to particularly
high levels. I've certainly seen it much higher without any
issues. It rises to about 45C in your log, which should not be an
issue for any of the components
There is nothing else really notable in the log that could explain a
bug of this type. If you or Tom can find a way to reproduce the problem
reliably then what we would need is you to connect a debug console cable
then to run the following commands and capture the output:
ps
perf
If NuttX is still running then those two commands will output quite a
bit of output on the console. If you can reproduce the crash and get
that output than it would enable us to eliminate a long list of possible
causes.
I'll keep looking at the log files from Tom as I get time.
Cheers, Tridge
mroberts

Randy Mackay
I can answer one of those questions which is the Serial 4/5 cable. You should be able to make Y cable. A cable with one 6pin DF13 end that fits into the Pixhawk but then splits into two cables, one that goes to the GPS and one that goes to your FTDI cable or whatever you’re using to connect the debug output to the computer.
We have a wiki page which shows how to build the debug cable but I believe it’s now incorrect. The orange and yellow wires need to be moved along two places. The power, gnd and the slots where the orange and yellow wires are currently connect in that diagram would instead need to be connected to the GPS.
http://dev.ardupilot.com/wiki/interfacing-with-pixhawk-using-the-nsh/
-Randy
--

Craig Elder
Craig Elder

Robert Lefebvre
Andrew Tridgell
> Would you recommend going to the latest build, or sticking with the 08
> April?
> If the blue ACT light on the IO side is still flashing (with the
> red IO light flashing twice as fast), and the big light green, does that
> mean the IO firmware side is still alive?
btw, another approach to finding the issue is a bisection search in the
firmwares.
If you look here:
http://firmware.diydrones.com/Rover/
you'll see every build we've done for Rover. With log(N) tries you could
narrow down exactly which change caused the problem to appear.
I'd also be interested to know if disabling a particular features stops
the problem happening. For example, does disabling the braking code
prevent the issue?
Cheers, Tridge
Lorenz Meier
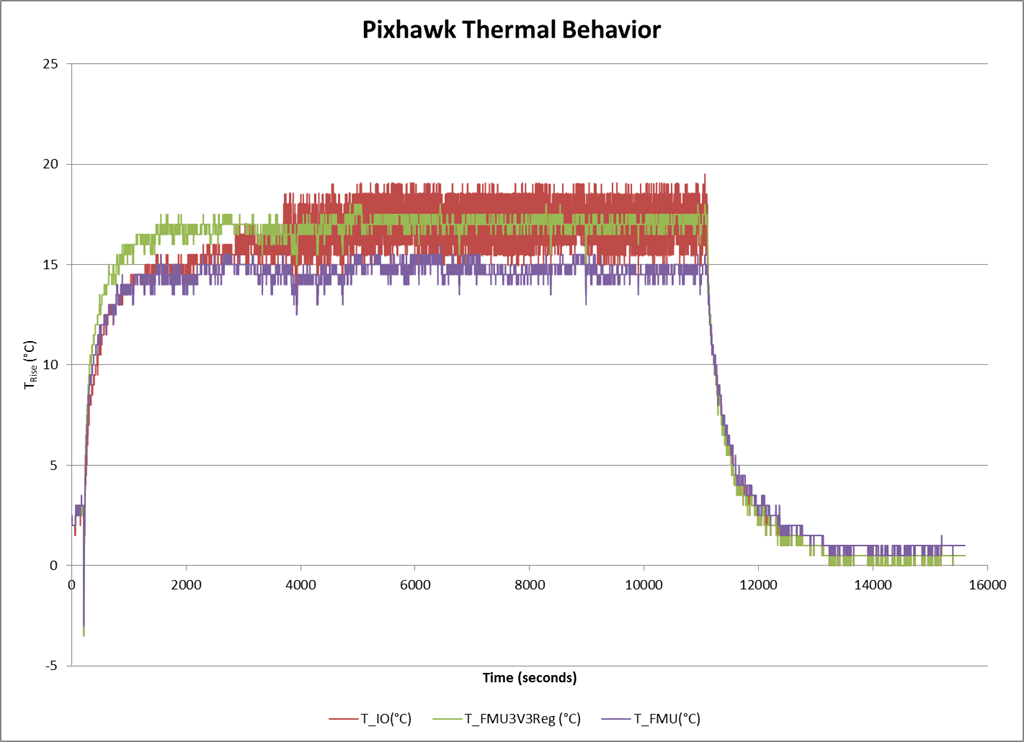
That's in the case with no airflow? If so, it seems pretty good.Could the issue be more to do with the sun beating down on a flat black case?
On 18 April 2014 13:25, Craig Elder <cr...@3drobotics.com> wrote:
Temperature rise above ambient measured in 3 places on the board I/O processor , 3.3V regulator, and FMU processor. Test was conducted at 25C and shows about 20C rise above ambient
<Plot.png>

Tom Coyle
mroberts
@chris, I must have got the wrong end of the stick somewhere. At one point I thought I saw 50C as the limit for the Pixhawk.
@Tridge, GitHub shows the last Rover specific edits seemingly about 10 days ago, yet there are more than daily updates on the firmware site - is Rover rebuilt every time there's a commit in another platform even if there are no changes? Thus I only need to look at builds between the last rover edit and theJan release?
Tom Coyle
Andrew Tridgell
> days ago, yet there are more than daily updates on the firmware site -
> is Rover rebuilt every time there's a commit in another platform even
> if there are no changes?
> Thus I only need to look at builds between the last rover edit and
> theJan release?
that can affect rover too, depending on the change. That is why it
rebuilds. It could be made smarter, avoiding some builds, but right now
it rebuilds every time.
Cheers, Tridge

Mike Ellery
Craig Elder
If you look in the first part of a dataflash log you can see the builds used to create the version of code including the px4 and nuttx versions.
--
mroberts
First of all, is there a mod who can change the title to something more correct and less scaremongery (since I was wrong about the thermal thing)?
- Big LED: Green
- FMU PWR: Green
- IO PWR: Green
- IO B/E: Flashing Red
- IO ACT: Flashing Blue
{kind=link}
Tom Coyle
Andrew Tridgell
> Do you know what rev of PX4Firmware was used when building the rover 2.45
> release firmware?
APM: ArduRover v2.45 (5b1ac474)
APM: PX4: 2699e15d NuttX: a6686464
the hex numbers are the git hashes of PX4Firmware and PX4NuttX
Cheers, Tridge
PS: This info is also in dataflash logs and tlogs
Andrew Tridgell
> connection seems to crash the Pixhawk in exactly the same way as I was
> seeing before.
> I've attached a screenshot of the debug output.
precise firmware you are running. A tlog or dataflash log would tell me
that, but it is also important that I be able to get the exact binary
with the same compiler. Did you use firmware loaded via MP? If so,
precisely which version? If you compiled it yourself I'll need the .elf
file from the build.
> I can crash it fairly reliably, so am open to suggestions of things to
> try. This is all with April 08.
>
> I still need to start working backwards on the builds.
If you can get me a log from the current build then I can see if I can
find the exact elf file, and try to get some call information from the
above trace.
Otherwise maybe I'll pay you a visit and see if we can debug it in
person :)
Cheers, Tridge
{kind=link}
{kind=link}
Andrew Tridgell
> Crash from latest build - 2014-04-22 02:04
(gdb) info line *0x0808300b
Line 77 of "mm_size2ndx.c" starts at address 0x808300a <mm_size2ndx+46>
and ends at 0x8083014 <umm_givesemaphore>.
(gdb) info line *0x08082bae
Line 183 of "mm_malloc.c" starts at address 0x8082bae <mm_malloc+90>
and ends at 0x8082bb8 <mm_malloc+100>.
I'm not at all confident that we are getting valid information here
though. Looking at that code I don't see how an oops could be produced
on those lines.
So this may be an indication that we have a memory corruption problem,
or it may be a red herring.
Are you available at all today to meet up and try to work through this
together? I can offer some fresh roasted coffee if you want to drop in :-)
btw, please don't try to fix the problem by changing anything on the
board apart from the firmware version. This bug may have some very
particular circumstances and we don't want to lose those.
For example, one area that I think is a possibility is that it is
related to the microSD card (possibly NuttX not handling some subtle FAT
corruption). If that is the case then reformatting the card may fix the
issue, but I wouldn't want you to do that as then we wouldn't be able to
pin down exactly what property of the card is causing it, so we wouldn't
be able to fix the bug.
If you can drop in then we'll either find/fix the problem, or if it
turns out to be board specific then I'll swap you for a Pixhawk that
doesn't show the problem.
The ideal would be to reproduce the issue on one of my boards that has a
JTAG connector, so we can catch the error in gdb. I've failed to
reproduce it so far though, which suggests there is something subtle in
the testing process or something in the board or environment that
triggers it.
Cheers, Tridge