Accelerometer data from LSM9SD0

Gustavo Sousa

Randy Mackay
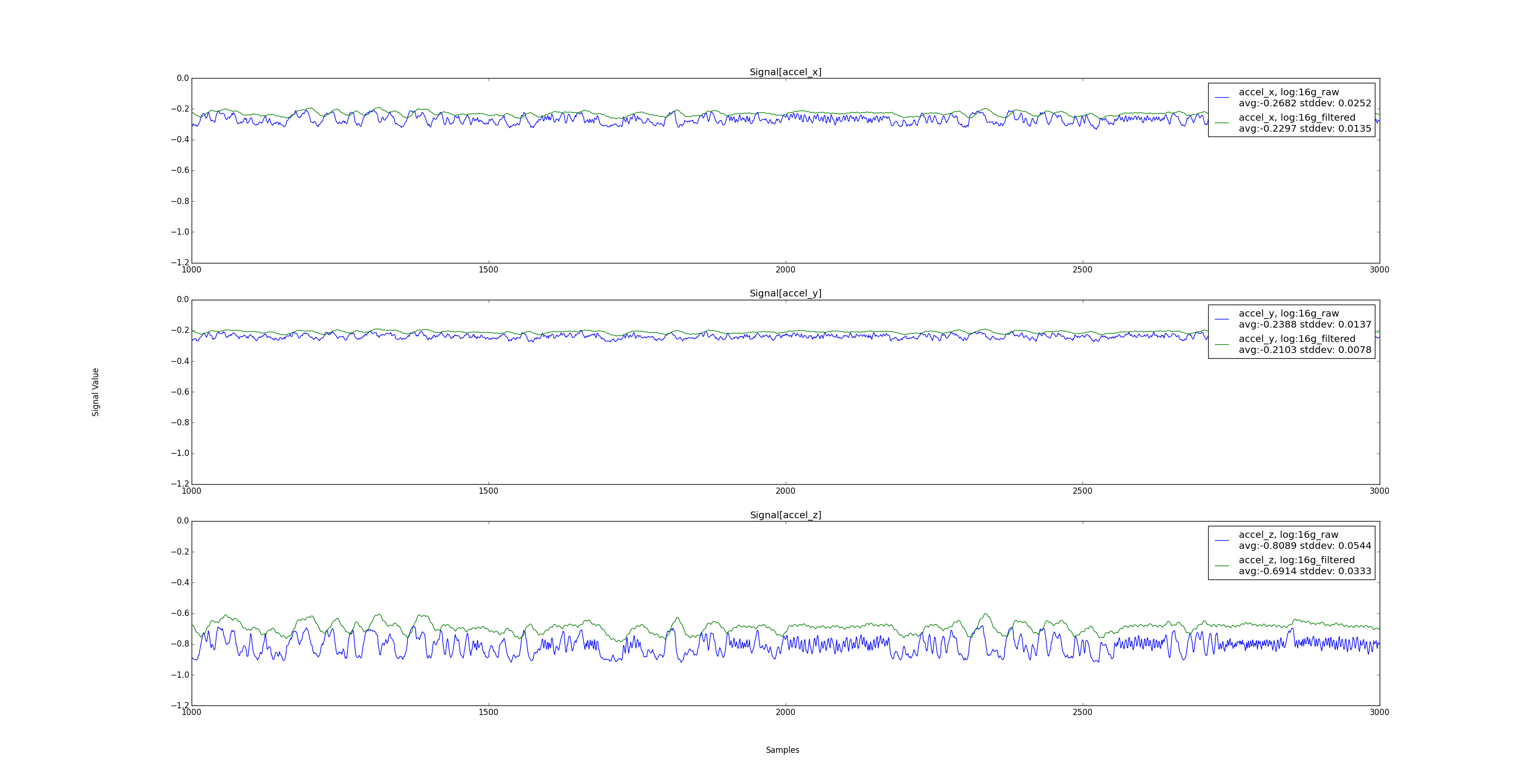
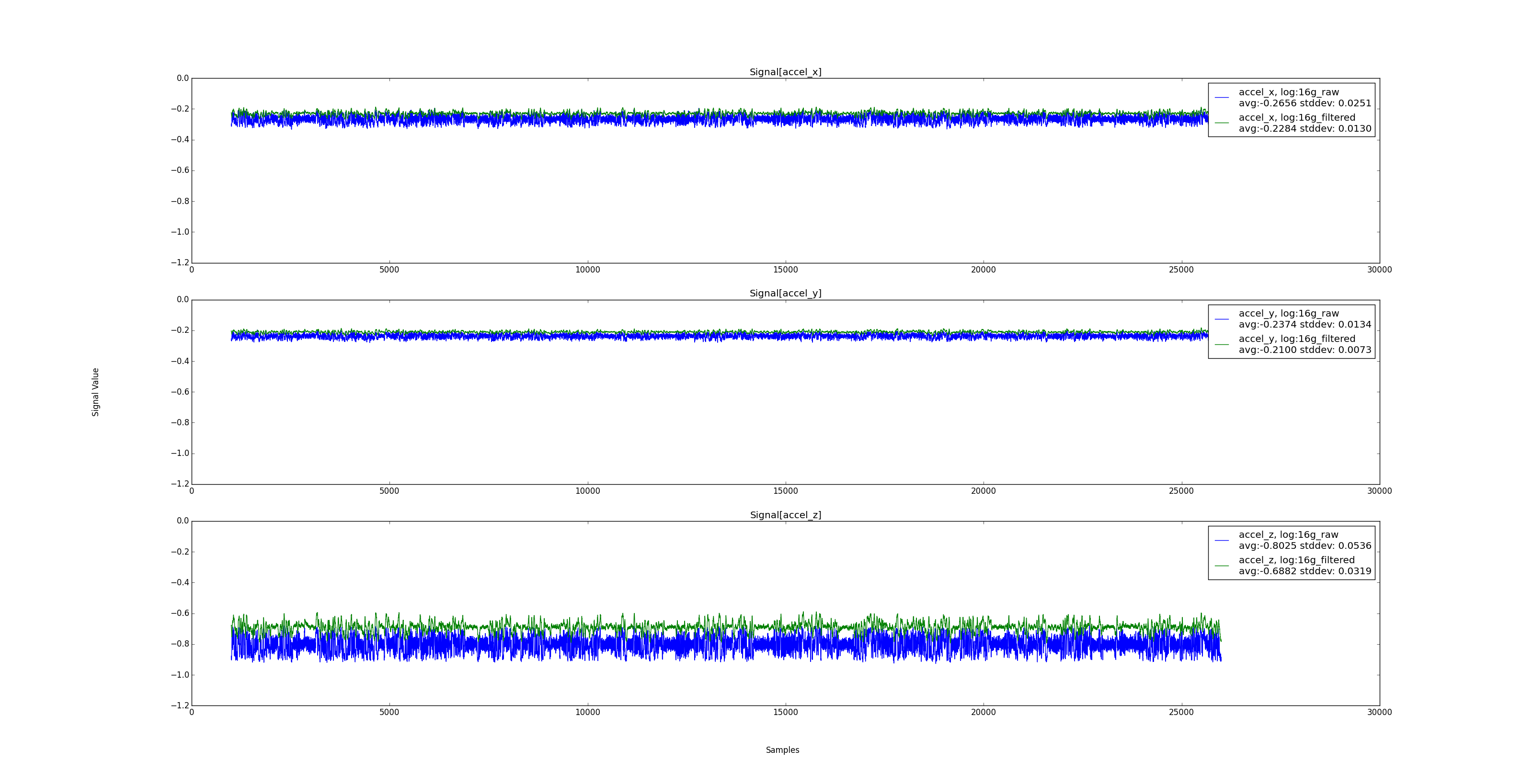
It would be good to set the range to 16g.
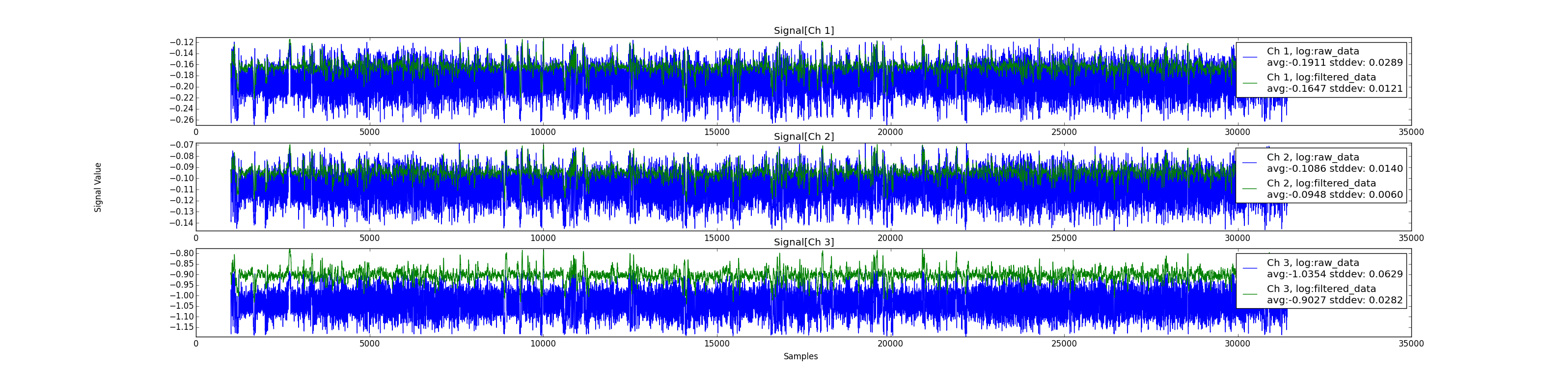
Normally when we see the data it’s in m/s/s but I guess this data is in Gs? So the Z is -1 which makes sense if it’s in Gs but normally we’d expect to see -9.81m/s/s. Maybe that’s just the way it’s been plotted.
If this is a bench test then the values look pretty noisy to me. I wouldn’t expect 1.5m/s/s of noise in a bench test – but if it’s in your hand then it’s probably fine.
-Randy
--
You received this message because you are subscribed to the Google Groups "drones-discuss" group.
To unsubscribe from this group and stop receiving emails from it, send an email to drones-discus...@googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
Gustavo Sousa
You received this message because you are subscribed to a topic in the Google Groups "drones-discuss" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/drones-discuss/UlSPql6eY2A/unsubscribe.
To unsubscribe from this group and all its topics, send an email to drones-discus...@googlegroups.com.
Randy Mackay
Gustavo,
Ah, my ability to multiply by 10x is not what it used to be. Ok, a quick peek at some MPU6k acceleration data makes it look like that’s in the same ballpark so ‘yes’, looks ok I’d say.
Gustavo Sousa

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Víctor MV
Gustavo Sousa
--
Gustavo Sousa
Oh, sorry!
Gustavo Sousa
This is the link to my patch: