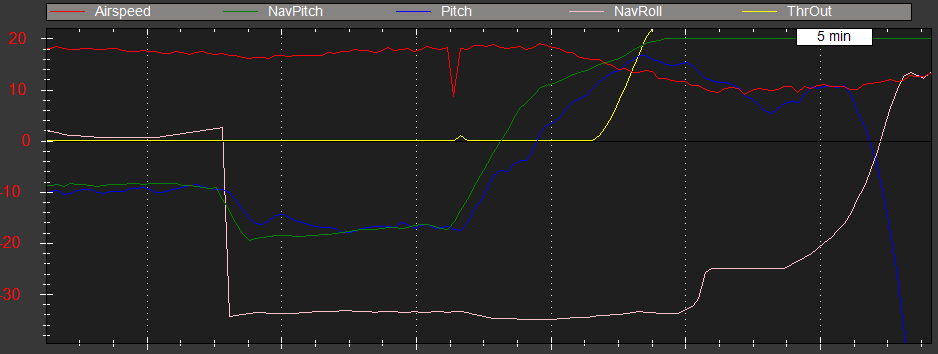
stall crash - suspect strange instant airspeed dip

Tom Pittenger

john...@gmail.com
Just speculating here but could it be that the log actually caught the laminar separation bobble forming as the stall was in progress? And If so, then doing a hard pitch up and max throttle is probably the worst thing you can do, pretty much guaranteeing a deep stall.
In general it's a no no to have aggressive maneuvers during landing approach, and even more so for wings.
Tom Pittenger
Is it really a hard turn if it has a 35 dev roll limit?
--
You received this message because you are subscribed to the Google Groups "drones-discuss" group.
To unsubscribe from this group and stop receiving emails from it, send an email to drones-discus...@googlegroups.com.
For more options, visit https://groups.google.com/d/optout.

Josh Welsh
Aw Tom sorry for your crash! I’ve played with X8’s a lot and just love them.
X8’s will turn with much more aggressive roll limits as long as the air is there. 35 degrees is definitely enough for an “X8 deathroll” if the air stops long enough – and “long enough” unfortunately isn’t very long; During my time with playing with X8’s (still my fav airframe) I got to the point where I could also reproduce the deathroll on purpose if the wind and other conditions were right. John’s correct as well, full pitch-up in that case is 100% the absolute wrong thing to do to fix it. Additional throttle and some nose-down likely would have recovered. The only way to recover from these deathroll/flatspins is to invoke manual mode and nose down while adding throttle, and anything else just makes the deathroll trigger faster.
As soon as I saw your images and your comments about airspeed and baro, I reminisced about the airframes I’ve lost to the same condition. 18m/s down to 8.5 and back up the next log iteration is certainly quick, but if there is any chance of those samples being accurate, 8.5m/s in a 35deg turn will for sure stuff an X8 in to a spin.

Andy Little
stall warning indicator would be an interesting project.
One design involves 2 plates one at nominal +45 deg to the air flow and one at nominal -45 deg. Each plate has central hole with a pressure sensor attached behind and the pressure difference is monitored. A standard differential pressure senor is all that is required. As to the exact mechanism by which stall approaching is detected; The simple analog is a "tell tale" , a piece of wool or cassette tape which will lift and flutter as stall is approached and is often used for the purpose on gliders and yacht sails. You would need 2 sensors of course, each maybe 2/3 out on each wing
On the X8 and other wings you can make it more stable by moving the C.G forward . As you move the C.G forward, you need more Up elevon. This effectively adds washout near the tips so reducing the angle of attack there and unloading the wingtips. It also reduces efficiency but that is the tradeoff. It is the search for the best efficiency which tends to illuminate the problem :)
regards
Andy
Tom Pittenger
Hi Andy,
Thanks for the kind words. The aircraft is fixable so I'll be up and flying in it very soon.
Regarding your advise on turn angle, do you have any suggestions on my params from that log? Do you have a param file you can share from your x8 Skywalker configuration?
I think the big question here is why did it stall while in auto mode especially with a roll limit of 35. There's something about the transition from normal stage to approach stage that makes the turns act funny. Everything works great if the transition is done while flying straight and level. On a turn there is a huge altitude bump and that contributed to the stall.
--
john...@gmail.com
Andy Little
Tom,
I dont have an X8 or any flight logs. Its all armchair flying :)
Whatever The blip in the airspeed to me looks like a failed read. I am questioning quite what happens on a failed read.
I am guessing we are in bool AP_Airspeed_PX4::get_differential_pressure( float & pressure) ?
That is called from private AP_Airspeed::get_pressure(), but cant really see anywhere that checks if the lower function has actually returned good data. If whatever calls AP_Airspeed::get_pressure() doesnt check _healthy (think only caller is AP_Airspeed::read() after start up..calibrate which does check _healthy) ?) I would guess you will get zero from reading the result .. but dont shoot me if I'm wrong. If so apologies for time wasting :)
regards
Andy

Jason Franciosa
Tom Pittenger
Andy,
I haven't had time to look into it yet but I suspected exactly what you are describing. A failed read, or a read that results in zero-ish, gets through the system. For the record, the only other i2c device sharing that bus was the compass. The standard 3dr GPS combo one.
Jason,
See https://github.com/diydrones/ardupilot/issues/1628
There is a synthetic airspeed that is used when no hardware airspeed is available. Problem is we can switch between them before only one is running at a time. For example, the EKF can call back to the DCM because both are always running. We need to change the airspeed library to always execute all airspeed options and log their data which will allow us to revert to internal airspeed when we detect a failed hardware pitot tube for whatever reason.
Johnarne,
The land approach was mostly into the wind so the turn started with a trail wind. As described, i was descending at the time so my airspeed was actually higher than normal: 18m/s where my stall speed param is set to 12. Cruise is 16 (up from 15 recently).
Andy Little
On Sunday, September 27, 2015 at 5:30:17 PM UTC+1, Jason Franciosa wrote:
It is quite scary that a blocked airspeed sensor or a airspeed sensor failure can be fatal. If the autopilot see's a sudden change of more than x percentage could those values be ignored? or you could possibly use the min and max speed parameters and if the airspeed sensor detects a sudden change out of that range it disengages and switches to just using GPS speed as it's most likely an issue with the airspeed sensor?I think this also brings up the need for stall recovery code in auto and stabilized modes that we spoke about here https://github.com/diydrones/ardupilot/issues/2669
The failure of airspeed sensors was fatal for AirFrance Flight 447 https://en.wikipedia.org/wiki/Air_France_Flight_447#Airspeed_inconsistency
The generally accepted "base level" solution to failed sensors appears to be for the autopilot to own up and say "I dont know what is going on. Dont trust me ..please take manual control" . IOW the autopilot should not be considered as a replacement for poor flying skills but only as a convenience to be used with caution and awareness of its limitations.
regards
Andy
john...@gmail.com

Robert Lefebvre
> IOW the autopilot should not be considered as a replacement for poor flying skills but only as a convenience to be used with caution and awareness of its limitations.
Amen brother. Amen..
--
Jason Franciosa
Tom Pittenger
Would it be possible to produce and use a cheap AOA indicator instead of Airspeed sensor? Technically, airspeed really doesn't matter if you know the true angle of attack of the wing to the relative wind. I'm not 100% sure exactly what these sensors look like, but, it could make the chance of a stall even less likely, especially during hard maneuvers during landing patterns. General aviation is finally pushing for them and in aviation terms they are quite inexpensive (Around $2000 for full scale). I'm sure if they are that cheap for general aviation we could make one for under $100 on a UAV or less.Any thoughts on flying AOA instead of airspeed for UAV's?
--

Holger Steinhaus
Tom Pittenger
Jason Franciosa
Tom Pittenger
Is an AOA sensor something that could be designed or developed for UAV's? I understand the importance of AOA, but, don't fully understand how they measure it at all times.
--

Dave S.
http://www.akaflieg.tugraz.at/wp-content/uploads/2013/04/simple-diy-aoa-sensor_v1.pdf
Philip Rowse
Robert Lefebvre
john...@gmail.com
Philip Rowse
Tom Pittenger
There's gathering AOA data and then there's knowing what to do with it. And ideas?
Jason Franciosa

iskess
Back when the Pixhawk was released, Tridge said that dual airspeed sensors was on the future todo list. What ever happened to that goal? It seems like an easy way to sanity check abrupt sensor output changes. If the additional airspeed sensor is analog, it would be a very inexpensive addition.
Philip Rowse
Tom Pittenger
Dave Skipper
Tom Pittenger

Auvidea
{kind=link}
{kind=link}
Federico Mari
Tom Pittenger
Frederico,
This is great info. Please post it to https://github.com/diydrones/ardupilot/issues/2928 to keep the info all together. Everyone keeps posting on my stall log thread! LOL!