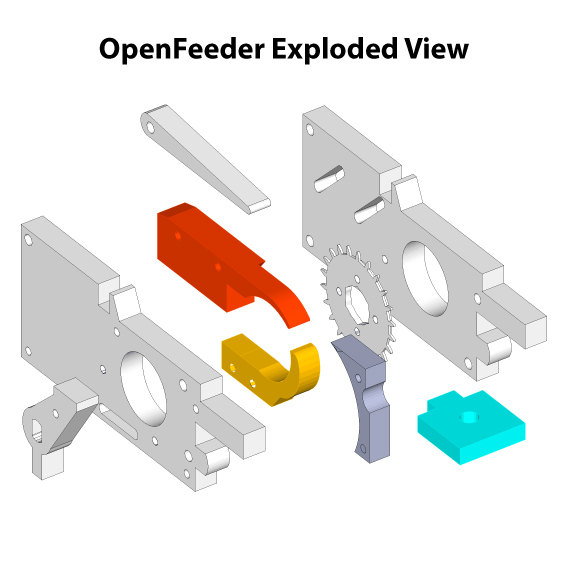
My OpenFeeder GitHub Repo

william hare



Anthony Webb

Jason von Nieda
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/164ef69f-0a81-4624-99aa-a8d0770978ff%40googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
Jason von Nieda
william hare
Jason von Nieda
Yes, feel free to list it. Description is good. If you don't mind, can you also add a link to my blog? http://portfolioabout.me/
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/373835b2-8702-46b1-a381-f1d82955891b%40googlegroups.com.
william hare


Graeme Bridge

Malte R.
nice design and clean files; I like it.
How do you remove the cover tape? By weights and gravity?
If I understand correctly, the feed rate and feed distance are only depending on Z-travel of the actuator pushing down the lever?
This means that the actuator has to provide that level of control and probably that camera must be used to determine component alignment - correct?
Have you seen Karl's design? He uses a combination of fancy gears and a locking pin which makes sure tape is only advanced to the next sprocket hole:
https://vimeo.com/144454867
I think your solution is simpler to make as it does not rely on several precision milled metal gears.
On the other hand I think that Karl's feeder might be easier to use.
I think it would be possible to add similar locking pin to your feeder, wouldn't it? Add a a spring loaded actuator and it should work fine.
What do you think?
Karl seems to be making good progress with his feeders:
http://liteplacer.com/phpBB/viewtopic.php?f=11&t=191&start=20#p1492
I hope it is OK to link to a post in LitePlacer forum here?
Thank you and best regards
Malte
william hare
Malte R.
I understand the advantage of being able to advance the tape by almost arbritrary distances - though it makes the actuator a bit more complex.
I think corrections could be applied using very similar algorithms to the drag feeder vision demoed here:
https://www.youtube.com/watch?v=VviPLNRWDFk
What is the maximum tape travel that can be achieved with one push?
In practice, I think most tapes work with 4mm pitch or multiples thereof (8, 12, 16). So with Karl's feeder design I suppose one could just push the lever several times - or implement a customized gear for those tapes; which would be less flexible.
Only exception are probably 8mm tapes with 2mm part pitch - but that could be adressed by using different pickup location for every second part.
Long story short - I believe the DIY PnP community benefits from trying multiple approaches and we will see which one works best and is easy to make.
Speaking of making: I used Taulman Bridge nylon filament quite a bit on my 3D printer and it indeed makes very sturdy parts. Downside is that they are also a bit flexible, which definetely is an issue when making gears and might be a problem for sprocket wheels... I will wait for your report :-)
Otherwise CNC milling or laser cutting is not too expensive either.
Regarding the Juki nozzle changer: I have just ordered custom machined nozzle holders from China for a new head design. I might buy larger quantity and resell sets with nozzles if quality and price are OK. The coupler will feature the same ball lock / push mechanism that Karl used for his auto changer. If you're interested, I can keep you posted.
Regards
Malte
william hare
Anthony Webb
Malte R.
I do not feel this actuator is "complex".
Sorry - I did not mean the lever on your feeder; that looks nice and straightforward.
I was referring to the actuator that actually drives the lever - so the part that will likely be attached to the PnP head.
With your design linear motion of that actuator along Z-axis needs to be controlled precisely - simplest solution probably being a lead screw and stepper motor. It's certainly not rocket science, but the "complexity" of advancing the tape by the right distance is moved from the feeder to that actuator.
With Karl's approach it is just a matter of pushing the lever far enough - e.g. by using a spring loaded probe attached to the head, solenoid or pneumatic system.
Not sure what works better - so I might end up trying both ;-)
@Anthony
Sure, I will. Auto change is exactly what I am aiming for. While my PnP platform currently is based on LitePlacer, I think the design for the head + changer should work fine on many DIY PnP.
william hare
Graeme Bridge
On Thursday, December 3, 2015 at 10:38:36 PM UTC, william hare wrote:
william hare

Ray Kholodovsky
william hare
Jason von Nieda
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/63cbe186-0bb6-4dd1-a111-67aeab52f2ce%40googlegroups.com.
Anthony Webb
william hare

Graeme Bridge
william hare
Graeme Bridge
Graeme Bridge
Anthony Webb
Graeme Bridge
william hare
Anthony Webb
Ray Kholodovsky
william hare
@ray
That was the intention. One Arduino board to control 10ish feeders. Each feeder does not need its own PCB. Just its own opto switch and servo.
I think it can be done without I2C or serial. Just need a I/O expander shield for the extra pins needed. Since only one feeder is feeding at on time, the system does not need to be complex. A custom shield would be the way to go. Then use JST type connector to attach each feeder to the custom shield.
Going back to the solenoid, I am afraid that when it kicks on, the parts might jump off the tape. Just a thought.
--
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/9QUzQ3I7aRc/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/acf36010-ba77-4b18-911d-98497ecf2609%40googlegroups.com.
Ray Kholodovsky
Ray

Richard Hornbaker
Cut slots in the drive sprocket to act as encoder for distance; it's more granular and consistently reliable than reading the tape holes. Use an opto sensor, or even an LED wired to work like one.
Use a single drive shaft for the bank. Maybe smooth, toothed, worm gear, etc.
Have a small solenoid in each feeder that engages a gear. Rotate the drive shaft until the sprocket opto sensor has gone the distance.
Devise a scheme for programming the distance to travel per feeder "step".
Opto sensor for pick operation. Triggers tape feed.
Use an o-ring belt drive for cover tape, so it can slip when tape builds up and the gear ratio for it changes.
The design would be autonomous, although on a bank-by-bank basis.

Wayne C. Gramlich
the sprocket would probably be the simplest. The electronics to
drive a stepper are not complex. H-bridge IC's are relatively cheap.
Frankly, 4 FET's are probably even cheaper. There does not need
to be a PCB per feeder, just four wires back to a common stepper
controller.
For tape pickup, my strange thought is to use a rotary paper trimmer
to simply slice all the tapes into confetti. Just drive it back and
forth to snip the excess off and into a garbage can. Again, I would
just use a single motor (DC or stepper) to drive the rotary cutter
back and forth.
Just some more ideas to throw into the fray.
Regards,
-Wyne
william hare
Graeme Bridge


Rich Obermeyer
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/f8430c14-bab9-422d-a76d-16915ebbc08d%40googlegroups.com.
Graeme Bridge
Anthony Webb
Rich Obermeyer
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/f760d34b-14b5-405f-8f27-3f9b964ffa20%40googlegroups.com.
Graeme Bridge
Rich Obermeyer
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/a837638e-a306-419c-beaa-0f2daa22cf92%40googlegroups.com.
Ray Kholodovsky
Anthony Webb
Rich Obermeyer
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/8a85c205-8e9e-443c-bba3-ae3f8a3598e3%40googlegroups.com.
Ray Kholodovsky
Graeme Bridge

mob...@gmail.com
The spacing for feeders is 15mm using double lane feeder design.
Rich Obermeyer
28BYJ-48 works, using cny70 for detecting holes simplify feeder precision a lot.
The spacing for feeders is 15mm using double lane feeder design.
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/70add1c5-c263-4069-8f3c-bc810f47c73f%40googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
Ray Kholodovsky
Graeme Bridge

Chris Riegel
Chris from ProtoVoltaics here. I've tried a lot of experience trying lots of things with feeders, and I'm happy to share so feel free to bounce ideas off of me if you like.
We started with solenoids that had a claw arm (pawl) that would pull a ratchet. The solenoid was too weak to pull a full reel. If you gear up the ratchet then the amount of movement is quite unpredictable and the pull speed is not easily controllable. I really recommend you not waste your time with this approach.
Obviously we're now using the pancake motor approach. We drive the pancake steppers with a Microchip MTS62C19A, which are about $1 in low volumes. We daisy chain the steppers and they talk using a CAN bus, which is super reliable. The host PC talks to one of the feeders using USB, and this "master" feeder forwards commands on to the other feeders on the CAN bus. Our feeder driver is just a few bucks and we run it off of the 24V that we feed to our X-Carve PnP motors with. You could use a lower voltage to drive it though.
That youtube video of ours is rather old, and we made it the same day we got that first unit assembled. We've changed the design a bit since then. You can program in the number of steps taken for each feed operation (actually it's hundredths of a step to account for errors you would get if you just used full steps), which is handy when you have reels with different separation distances between the parts. It was mentioned that the feed in the video is not exactly 4mm, and that's true, but we did nothing to calibrate it for that video. We just wanted to get the video off. The feed is much more accurate when you put the proper number of steps in. Also, our system uses vision feedback to correct for any offset errors that might occur. So in our setup it really doesn't matter that there is a little bit of positional error. I don't think you should try to guarantee zero positional error. Our approach is to expect some positional error and use vision to correct for it. I mean for the smaller parts you are going to have to anticipate some positional error.
While our design might look complex, it's all laser cut stainless steel, which is pretty cheap. Just a few bucks in metal costs and laser time. The most expensive thing is the pancake motor by a large margin.
I gave the communication specs to CriS a long time ago to build a module for OpenPnP. I still want to integrate it with OpenPnP, but I'm a bit swamped with work now. I laser cut the sprockets that william is using for his feeder design, so if I can help others too let me know.
- Chris
Anthony Webb
mob...@gmail.com
For microswitch there having electrical life of 50.000 . This is less then 10 mini reels.
Measuring it directly with optical is pain in the ass for paper tape or transparent carrier that are transparent for it.
Anthony Webb
rayk...@gmail.com
Ray
This idea Graeme posted earlier of advancing the next part by peeling back the cover with a servo seems like it is the most simple and apparent seems to work very well. Is there any flaws you guys can see in that method?
--
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/9QUzQ3I7aRc/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/f850dde5-4b04-4b0e-a774-50d761a84dc6%40googlegroups.com.
Graeme Bridge
rayk...@gmail.com
Ray
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/c255c3ed-db4a-4099-9b1d-12ea3a25c8d8%40googlegroups.com.
Anthony Webb
https://www.adafruit.com/product/154
Ray Kholodovsky
Anthony Webb
Graeme Bridge
Ray Kholodovsky


Robert Walter
With regards to the size and cost of the switch ($2), you may find switches similar in size that are cheaper, but most are limited to relatively low mechanical lifespans (50K operations). That doesn't translate to many reels of components before breakdown. It is amazing how small things need to be in order to detect those small holes accurately.
Rob.
Malte R.
The microswitch idea is nice, but I notice that it is being used on paper tape which is about four times thicker than plastic tapes [...]
Volker describes the switch in more details on his homepage - but it is all in German:
https://www.vbesmens.de/de/bestueckungsautomat/gurtfeeder.html
I'll try to translate this bit for you ;-)
Apparently Volker used opto sensors at first, but these gave him problems with transparent plastic tapes. He also tried a bunch of different micro switches and fount the one he refers to work nicely.
It needs to be small enough, work with little force and have a dome shaped actuator so it does not stall the tape.
While the video shows paper tapes, the feeder does also support many sorts of plastic tape (plastic and clear) with different embossed profiles.
The trick to have tapes of different thickness work with the same switch is a small plastic part which pushes the tape upwards aggainst the switch. I tried to render this from the Cubify CAD files which Volker kindly shares on his website.
Here are a few more pictures which show the mechanism:
[...] and also much more rigid. Exerting force of any kind on the tape, especially that of a snap action switch does not sit well with me.
I doubt that paper tape is more rigid than plastic. I often saw ripped paper tapes on industrial P&P while plastic tapes hardly rip in practice... So I believe this will not be an issue.
Hope this helps!
Regards
Malte
Robert Walter
I did not see the images regarding the spring plate under the tape. That makes much more sense. Lots of little pieces, but should work well.
I am going optical in my design, but in an encoder type of way. It does away with the whole microswitch, wear, springs, plate, etc. I am not sure how long the little nub on the switch will last, but Volker did come up with a clever solution.
Rob.
Graeme Bridge
Ray Kholodovsky
Jason von Nieda
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/8dcc4d25-a239-4efb-8d25-2cc4c0835781%40googlegroups.com.
Robert Walter
You are pretty much spot with the route I am taking....
In any case, i like the way you think...
Rob.
Ray Kholodovsky

Lisandro B
Pros:
Simple
Easy to scale
Cheap (u$1.3 each servo )
Solves the cover problem, no fishing weights or extra stepper
Very simple to drive (u$ 5+/- for a 16pwm servo shield, and stackable!)
Cons:
Durability? dont know how much of a problem this is, and in such case, servos can be replaced, also, there is a metal gear version
As for the switch, I dont like the durability of mechanical switches, would prefer optical but there is the transparent tape problem. A simples solution migth be a OpenPNP calibration cicle with the camera and an offset recognition before each pick