mulling over the details of imperative-rules.scm file from chatbot-eva
18 views
Skip to first unread message

Apil Tamang
Nov 30, 2016, 8:38:21 AM11/30/16
to opencog
Hi,
Trying to understand the code-framework for chatbot-eva in more detail. I think that most of these questions arise from deficit understanding of the basics of opencog and/or familiarity with its multitude of atom-types. I've used wiki.opencog.org to search details about a new 'Node' when I come across one, but sometimes, some node types don't show up.
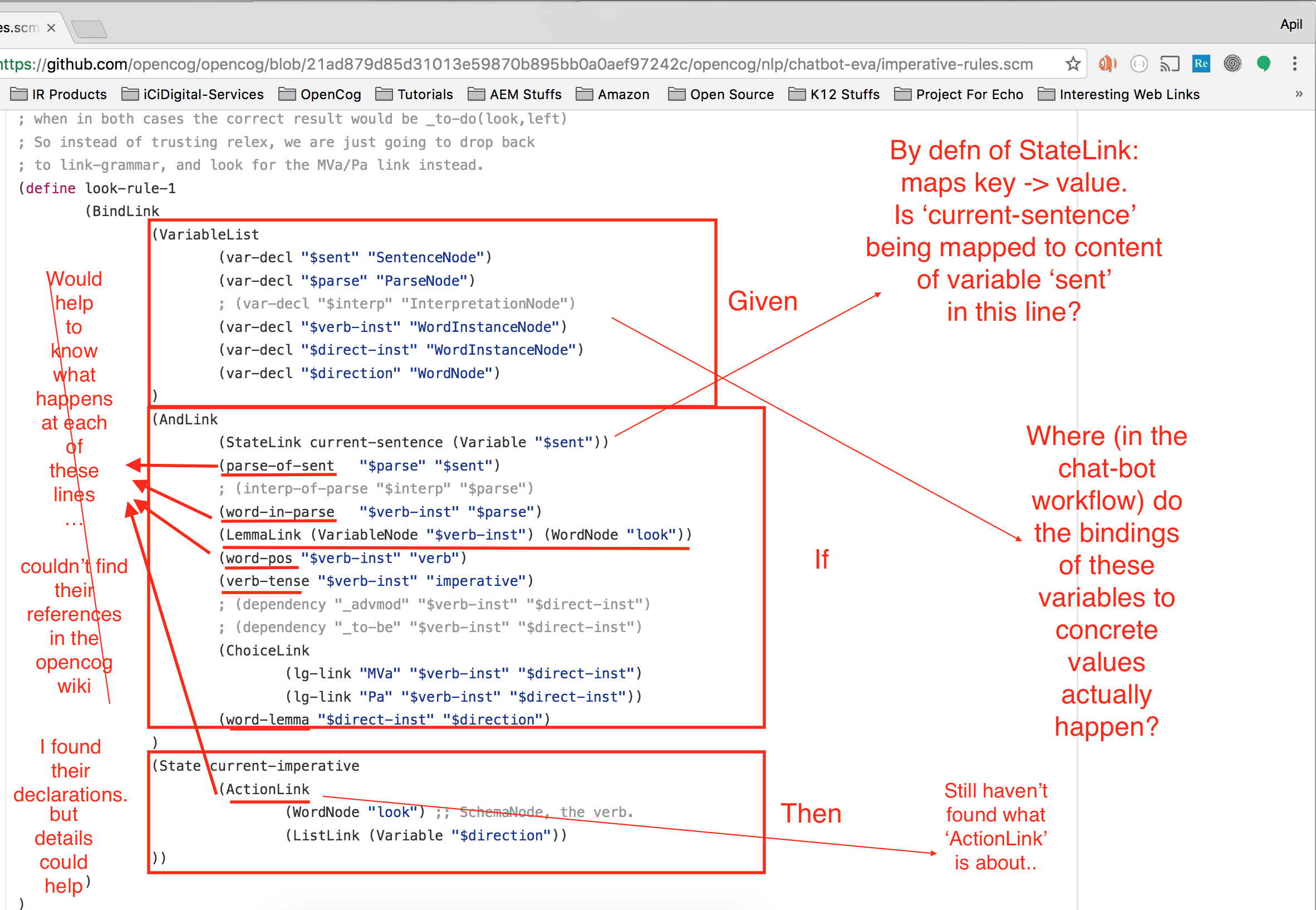
Anyways, I've included the questions in the attached image itself. Let's assume for the sake of learning that 'look-rule-1' (lines 59 - 90) is just what it is. The main questions are around:
- how do the binding of values occur for the various variables declared (i.e. $sent, $parse, $verb-inst, etc.)
- What is happening inside the 'AndLink' block ? Are each of those statements essentially just boolean statements (in account of being evaluated against an AndLink) ?
- How does the 'ActionLink' node work. The wiki is completely mum about this..
Any amount of detail would help.. and I think would provide a good foundation to understand more code appearing in this code-base.
{kind=link}
Apil Tamang
Dec 1, 2016, 7:56:49 AM12/1/16
to opencog
At least I found what the 'ActionLink' is about:
At the center of the architecture is the ActionLink. Its a new,experimental link type used for holding simplified representationsof imperatives, intermediate in form from the fully-parsed Englishlanguage input, and the low-level physical motor commands. Thatis, parsed English is converted into these simplified action structures,and then these simplified structures are mapped to actual physicalactions.
Reply all
Reply to author
Forward
0 new messages