MatrixPilot 5.0
155 views
Skip to first unread message

Peter Hollands
Oct 28, 2016, 11:52:53 AM10/28/16
to uavdevboard
Folks,
I am delighted to announce the MatrixPilot 5.0 release.
The last release was MatrixPilot 4.1 on the 26th November 2013. The new release really has 3 main components:-
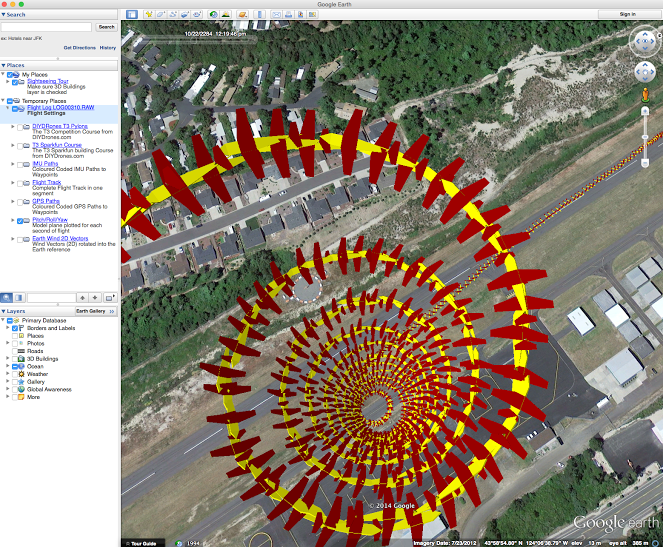
- A new flight control system by William Premerlani called helical turns. This provides vastly superior flight control compared to the previous "stabilization" technique. It is ideal for FPV flyers. Bill has complemented his elegant IMU with neat flight control.
- A code base that has been improved for developers, thanks to heavy lift coding by Robert Dickenson.
- Improved cross platform portability to multiple processors and operating systems
- Created an automatic project generation script, for all the MPLAB-X and legacy MPLAB projects
- Created an automatic build system to test compile many different options with different includes of code, different processors, and software in the loop compiles, all from one command.
- Integrated all of the above into the Travis build system on github, so that all Pull Requests from developers are automatically test compiled with the above tools.
- A core system that is well tested and trusted. I want to particularly thank there individuals for their testing and bug reports and fixes over the summer:
- Kees Guijt, has repeatedly kept his own glider code base up to date with master, and been testing on the AUAV3.
- Giulio Berti, currently busy with academic work, tested out master with his Dragon Flying Wing (Over 1 hour endurance on the UDB4), providing super feedback.
- Leonardo Garberoglio, a relatively new flyer, has enthusiastically tested master, and the native OSD on the UDB5.
I have being testing the code on the Autopilot stack for the UDB4, UDB5 and AUAV3.
All software may have bugs and you will need to take all the normal precautions.
If you are long time member of the project, you may find that a lot has changed:-
- You will need to clone the repository from https://github.com/MatrixPilot/MatrixPilot and select the tag for MatrixPilot_5_0.
So you do really need to start to learn git. We used to use svn and sourceforge. - I recommend using a tool like sourcetree to switch branches, and keep track of your own changes to the options.h file.
There are other good tools as well, but if you use that tool, then we can give you detailed support from our own experience. - The options.h files are now all in one directory called Config in the top directory.
- You will need to use MPLAB-X. The legacy MPLAB IDE is no longer supported. You can download the Microchip tools as follows:-
- MPLAB-X IDE (Verson 4.0 onwards supported)
- XC16 C compiler (version 1.26 onwards supported)
- dspic Peripheral library (This is a new download required from XC16 version 1.25 onwards).
The download is on the same page as the XC 16 compiler downloads page.
The market for Drones and UAVs has now become large and commercialised. Times have changed. This project is still true to it's roots, providing fun for enthusiasts with a code base that is understandable, relatively simple, and, I hope, trustworthy.
Best of all, this release flies well, as shown in the video that posted earlier.
This project has had super input from may great flyers and developers over the years; too numerous to mention all of you just now. Many thanks for your support.
Best wishes, Pete
P.S. I have made some updates to the Wiki which still needs more work. I would call out the following pages which are revised pages of Bill's pages on helical turns:-
- Helical Turns Controls :- Setup and Operation (with links to 3 theory PDFs)
- Advanced Configuration: Setting up Angle of Attack and Trim modelling
- Setting up Custom Offsets
P.P.S Here are a couple of links to the original postings on helical Turns on DIY Drones:-

Phillip Kocmoud
Oct 28, 2016, 12:08:07 PM10/28/16
to uavde...@googlegroups.com
Awesome, nice work guys!
Phil
--
--
---
You received this message because you are subscribed to the Google Groups "uavdevboard" group.
To unsubscribe from this group and stop receiving emails from it, send an email to uavdevboard+unsubscribe@googlegroups.com.
For more options, visit https://groups.google.com/d/optout.

Philip Giacalone
Oct 28, 2016, 12:52:11 PM10/28/16
to uavdevboard
Great work. Congrats to the team!

Marks Gmail
Oct 28, 2016, 3:06:46 PM10/28/16
to uavde...@googlegroups.com
Great job! MP is a great UAV platform. I have learned so much just reviewing the code.
Mark Ingle
Maker of Things
To unsubscribe from this group and stop receiving emails from it, send an email to uavdevboard...@googlegroups.com.

William Premerlani
Oct 28, 2016, 5:48:59 PM10/28/16
to uavdevboard
Peter,
Once again, thank you very much for your hard work and outstanding contributions to the project.
I can still remember that you used the first version of your flight analysis tool to detect one of the first bugs in MatrixPilot by driving across a farmer's field, as I recall.
Well done, my good and faithful friend.
Best regards,
Bill

Leonardo Garberoglio
Nov 2, 2016, 8:50:31 AM11/2/16
to uavde...@googlegroups.com
That's a great news!!!

{kind=link}
George Tsiros
Nov 4, 2016, 4:31:39 AM11/4/16
to uavdevboard
Awesome, awesome, awesome :)
A heartfelt THANK YOU for aaaall the work you have done.
It is more than obvious that this is nothing short of a work of love.
Also, Premerlani-dude, i think you're the one that studied very fast rotations? On record players and stuff and then figured a very accurate way to track rotational position? If yes, a big thanks to you too :)
William Premerlani
Nov 4, 2016, 6:25:53 AM11/4/16
to uavdevboard
Hi George,
Thank YOU so much for your kind words.
Yes, this is a work of love, with major contributions from many others, you all know who you are.
Here is a link to my diydrones posting on very fast rotations:
And a link to some of my other technical works of love:
Best and warm regards,
Bill Premerlani
--
Reply all
Reply to author
Forward
0 new messages