Re: [UDB-dev] Re: Incorporating a sonar and logo related functions for accurate soft landing

Peter Hollands
I started down this route a little. I have a maxsonar fitted to my Alpha Axion, and every flight, I have collected telemetry from the Sonar for about 6 months. The telemetry is recording the sonar 4 times / second.
My C code, for interfacing to the Max Sonar was definitely an initial "quick fix". So I have not shared it more widely.
I think that having a good understanding of the "Transfer Function" of the plane with regard to elevator control is important.
Best wishes, Pete
Greetings...all for the purpose of enabling real precision landing within logo waypoints (perhaps, eventually MAVLINK).
Just wondering if there's been any initiative along these directions:
1. adding a sonar sensor e.g., SFE's SEN-11309 or RTL-10427; OR a barometric sensor (not sure which is more accurate)
2. enhancing logo to include:
2.1. sonar detected altitude systems value for conditionals, e.g., IF_LE(ALT_ZNR, 0.5) m or cm
2.2. flare pitch up function to be used in conjunction, e.g., PITCH_UP(10)... SET_SPEED(x)... FLAG_ON(F_LAND)
2.3. a take-off position (USE_TAKEOFF_POS similar to USE_CURRENT_POS) and take-off angle (USE_TAKEOFF_ANGLE...)
I'd like to do these myself and can use some help and directions on the roadmap to take on what codes and classes (functions/data/identifiers/variables) are involved..
It'll be a bit of an uphill climb for myself and maybe a bit ambitious as haven't used c for quite a while for the past 20 yrs.. Some design materials on the WIKI might give me a good start, in addition to any directions from the group.
Best wishes.
Daniel

DB
DB
DB
Kindest regards.
Daniel
Peter Hollands
I did run a quick test of the SUE over MAVLink in the morning, and that failed. But the reason may have been an OpenLog fault (e.g. baud rate setup). I did not have time to look into it, so reverted to SERIAL_UDB_EXTRA.
My sonar is XL-MaxSonar from the EZ/AE range, and is the MB1230 model( link to datasheet). I currently have interfaced it to channel 7 input, and I measure the PWM values. I had to change the PWM timer mechanisms for channel 7 in order to get sensible values. (PWM values form the sonar have a vastly different range from PWM values for the radio inputs).
You will see that ranging of the device goes from around 0.2m (minimum) to about 7.5 meters (maximum) in ideal conditions.
The update rate is stated as being at around 10Hz. I already know that the data is not always clean. There can be anomolies. So some filtering will be required of the incoming data.
I already to hard landings automatically, just by letting my plane come down a glide slope. So my objective was simply for the plane to detect the ground at the end, and try to stay say at around 0.7 meters above the ground for the final glide, while drag of the plane slows it down, eventually the plane will stall, gently onto the ground. I have no wheels, so my plane then stops within 1 second. (A small light foamy at the moment).
I can the following challenges:-
- Clean data from the ultrasound
- revise range data to account for bank and roll (fairly easy) (i.e. determine vertical range to ground).
- The system, with no "look ahead", is only really suitable for flat landing fields.
- Feedforward control, understanding the characterstics of the plane close to stall, along with drag characterstics, may be vital.
- Good landing may require a good understanding of the "transfer function" of the plane for pitch control, but since we are operating close to the stall, the mathematical model may be invalid.
More on transfer functions later.
Peter Hollands
I enclose the patch that I made to my version of trunk, in one evening in April 2012, for collecting Sonar information.
I have to say that it was a quick patch, and a rough piece of coding, and it is certainly not code for general release.
It was an initial quick experiment. I have left that code in my version of trunk, and so I can verify that it has been safe to use in practice as I have flown with it since April.
For the UDB4, I am using a spare timer, Timer 3, with different settings, to measure the PWM pulse from the Sonar, on channel 7, which I do not generally use for anything else. It's hard coded, and not setup for any changes in options.h .
I enclose the patch file for your interest. I'm not sure if you familiar with patch files, and the use of Tortoise Subversion ? If you want any help with applying the patch and using Tortoise SVN, then please let me know.
Best wishes, Pete
DB
Thanks very much for sharing the patch. Just quickly looking at it (SVN), it'll definitely give me a jump start...
I had a chance to do some flying yesterday and this afternoon comparing the latest 1692 with 1667, the one I've been using and found very stable/predictable. Probably trivial but I'll be rolling back to 1667 as my baseline, based on some flight observations and some compile errors with 1692 particularly with it's UDB4 OSD flash..
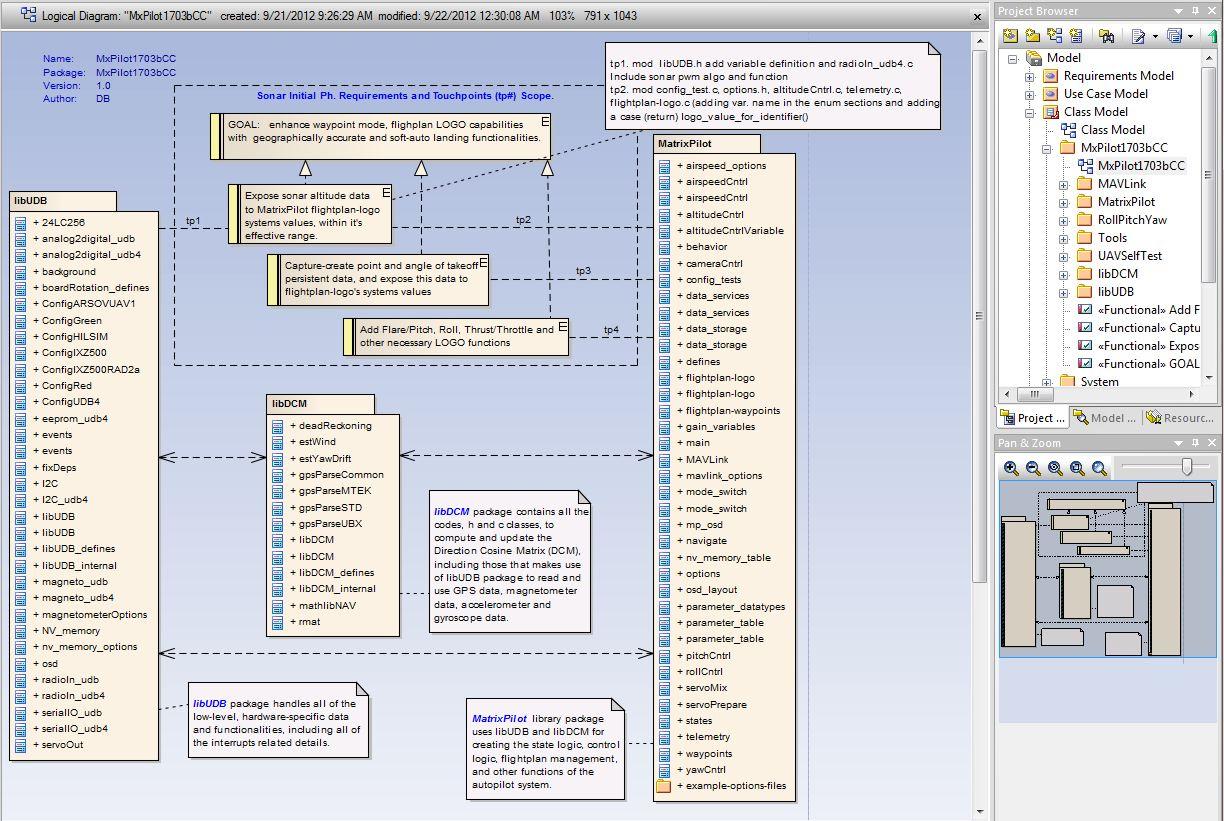
To speed things up a bit, I also managed to reverse engineer the rev1667 into class models (with some bi-directional RAD tools I used to use) just to have some initial understanding of what might be in scope of the new functions related to the use of the sonar sensor.. I'll keep you posted continuous advice and feedback.
...really appreciate the help.
All the best.
Daniel
Peter Hollands
Sounds like you are all setup to make changes.
BTW: Between 1667 and 1692 there is only one change to trunk. That is the addition of CRC (Cyclic Redundancy Checks) to messages arriving from the EM406A GPS.
All the other changes are to MatrixPilot_Quad, MatrixPilot_fbw (Fly By Wire), and MatrixPilot_NMEA (A special branch for testing Guilio's NMEA GPS parser).
Best wishes, Pete
DB
Peter Hollands
I can see that we still need to establish, from experiments, that the Sonar will provide a sufficiently reliable indication of height.
It seems to me that there are a number of challenges ahead on the Sonar Landing Flare feature:-
- Ensure we have frequent and accurate trustworthy data from the Sonar Height Above Ground sensor.
- We may need an "observer" style Kalman Filter, in order to get quality data.
- Raw data is only fed 10 times / second from Sonar.
- At 10.0 m/s and 20 degree pitch down, the plane is descending at least at 3.4 m/s. If the beam is working at up to 7 meters from ground, then that provides a valid return from 7.0 * cos(20), which is 6.5 meters above ground. In other words, the flare must occur within about 1 second of flight, in order to flare safely, 1 second before hitting the ground ! Not much room for an error margin. Of course those figures improve if the intial descent rate is less thatn 20 degrees.
- The entire concept of downward looking Sonar implies the landing
site is flat, or gently sloping. Sudden changes in slope will not be
detected in time.
- We probably need our plane's to be optimally set up for control of height by the AutoPilot. The best way to do that, is to learn how Bill has extracted the control Transfer Functions for Pitch and Roll from his Quad, and apply that type of technology to pitch control, and height control of the plane. Then, with transfer function in hand, we can model the entire flare control algorithm in a mathematical simulator like the Open Source Xcos (similar to Simulink for MatLab).
- Only once we have successfully modelled the landing in Xcos, with typical noise to the Sonar, would I really want to embark on coding up the solution. I enclose a sample (made up), options.h entry for Sonar Flare and Landing.
////////////////////////////////////////////////////////////////////////////////
// MAXBOTIX SONAR TERRAIN FOLLOWING AND LANDING FLARE
// Designed for use with the following device:-
// http://www.maxbotix.com/Ultrasonic_Sensors/MB1230.htm
// Can be used on INPUT 8 of the UDB4 if that is not used for other purposes.
// Will compensate for roll / pitch, subject to receiving a returned sonar signal.
//
// This option is for UDB4 only
// Height is returned 4 times / second in centimers in SERIAL_UDB_EXTRA PWM channel 8.
//
// NOTE: Requires Auto Pitch PID adjustment to be enabled.
// Auto Pitch PID will auto adjust your plane for the best possible PID control of height.
#define AUTO_ADJUST_PITCH_PID 1
// SONAR_STABILIZED_TERRAIN_FOLLOWING
// In stabilized mode, the plane will attempt to stay above a minimum sonar height from ground
// using Throttle and Pitch. If Throttle is cut to zero, the plane will glide in.
#define SONAR_STABILIZED_TERRAIN_FOLLOWING 1
#define SONAR_STABILIZED_MINIMUM_HEIGHT 2.0 // Meters. Minimum 1.0, Maximum 6.0
// SONAR LANDING FLARE
#define SONAR_LANDING_FLARE 0
#define SONAR_FLARE_DESCENT_RATE 0.3 // Meters / Second. 0.3 is default value.
#define SONAR_FLARE_START_HEIGHT 4.0 // Meters. Minimum 1.0, Maximum 6.0. Start High !
Best wishes, Pete
Peter Hollands
I took the dot product of the Z axis of Rmat (rmat6,rmat7,rmat 8 ) with the Z axis (RMAX, 0, 0) to get the cosine of the angle subtended between vertical and the vector of the path of the sonar beam with reference to the earth axis. I think I got that right.
For anyone following this I welcome any comments on the code below.
Best wishes, Pete
#elif ( SERIAL_OUTPUT_FORMAT == SERIAL_SONAR )
extern int udb_pwm_sonar ;
#define UDB_SONAR_PWM_UNITS_TO_CENTIMETERS 4451 // 64536.0 / 14.5
fractional z_vector[] = {0 , 0 , RMAX} ;
fractional cos_pitch_roll ;
void serial_output_8hz( void )
{
union longbbbb accum ;
int sonar_distance ; // distance to object regardless of orientation
int sonar_height_to_ground ; // distance to object in Earth's Z Plane
accum.WW = __builtin_mulss( udb_pwm_sonar, UDB_SONAR_PWM_UNITS_TO_CENTIMETERS ) + 32768 ;
sonar_distance = accum._.W1 ;
serial_output("S%i\r\n", sonar_distance) ;
cos_pitch_roll = VectorDotProduct( 3 , &rmat[6] , z_vector )<<1 ;
if ( cos_pitch_roll > 16383 )
{
cos_pitch_roll = 16383 ;
}
serial_output("C%i\r\n", cos_pitch_roll) ;
cos_pitch_roll = cos_pitch_roll << 1 ;
accum.WW = __builtin_mulss(cos_pitch_roll, sonar_distance) ;
sonar_height_to_ground = accum._.W1 << 1 ;
serial_output("H%i\r\n", sonar_height_to_ground) ;
return ;
}

William Premerlani
William Premerlani
William Premerlani
Peter Hollands
Thanks very much for the comments.
Yes, now you mention it, the dot product arithmetic is obvious, and all I need is Rmat 8.
I shall look into the beam aspects in more detail later.
I shall do some more flight tests now, to see if the sonar device works well on my local flying field.
Best wishes, Pete
Peter Hollands
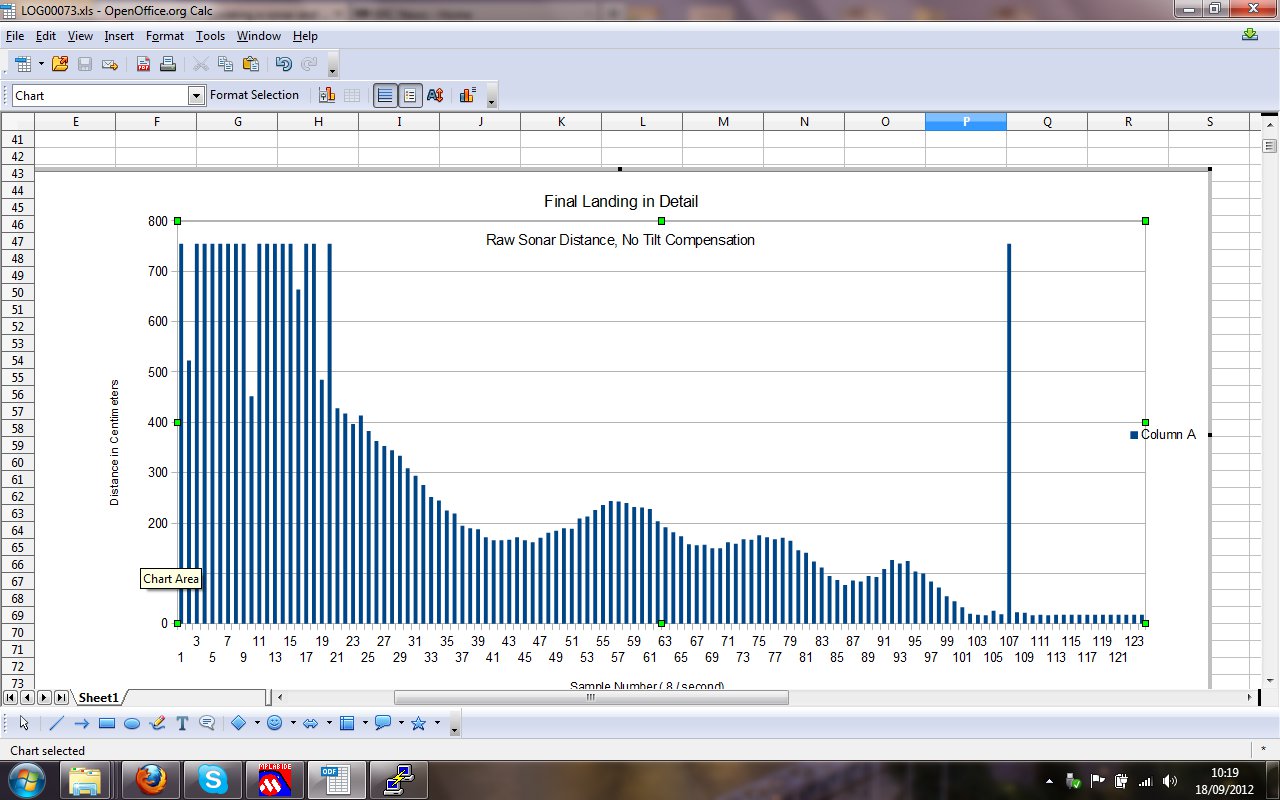
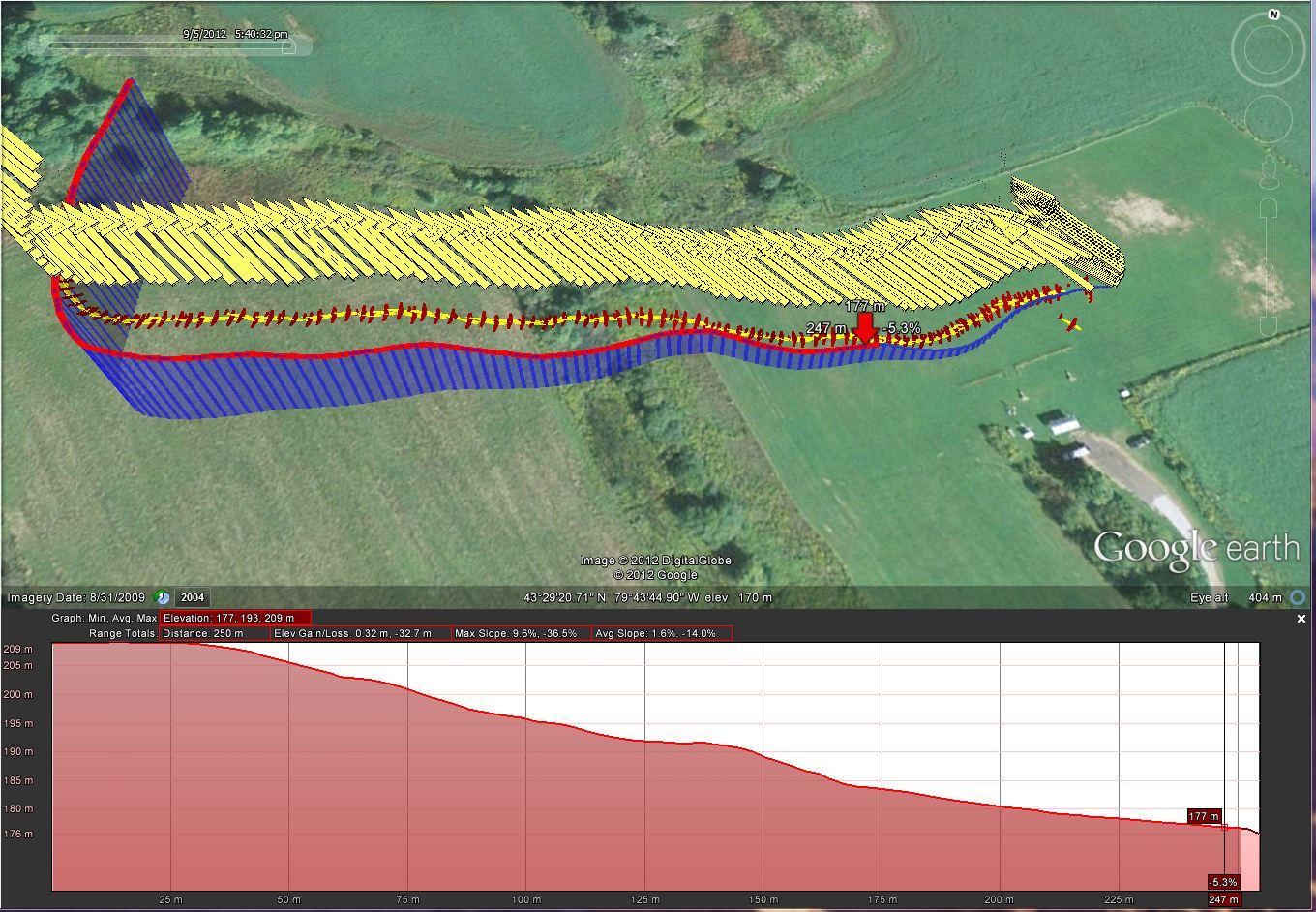
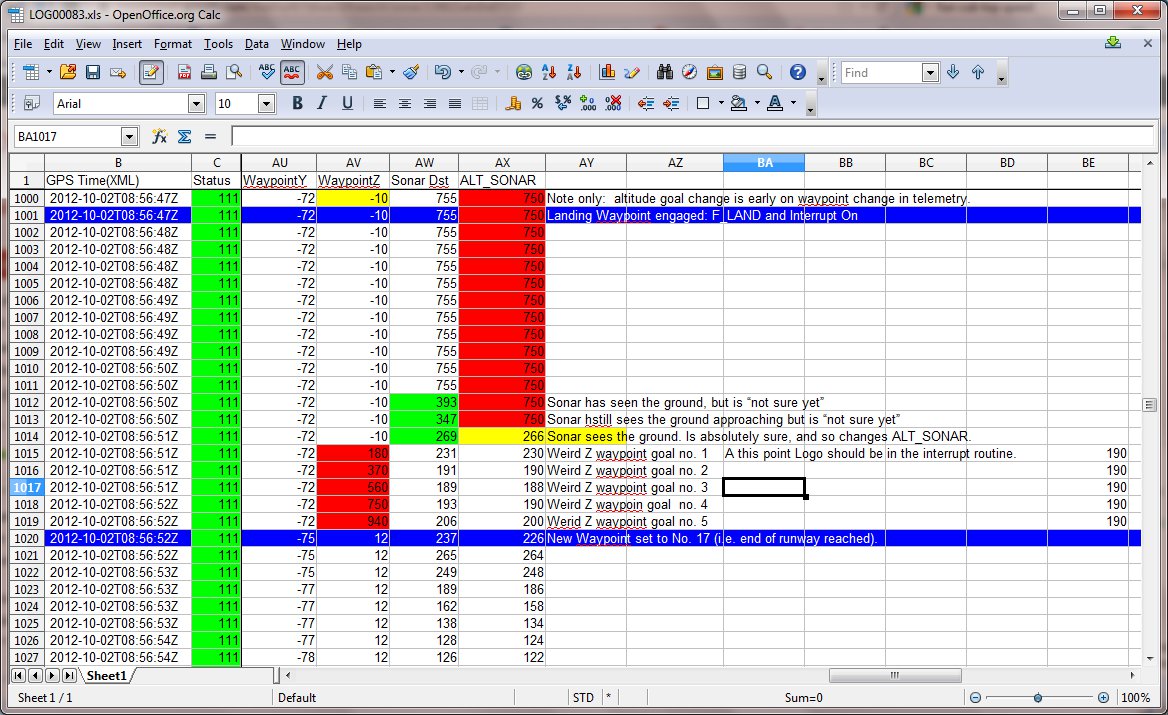
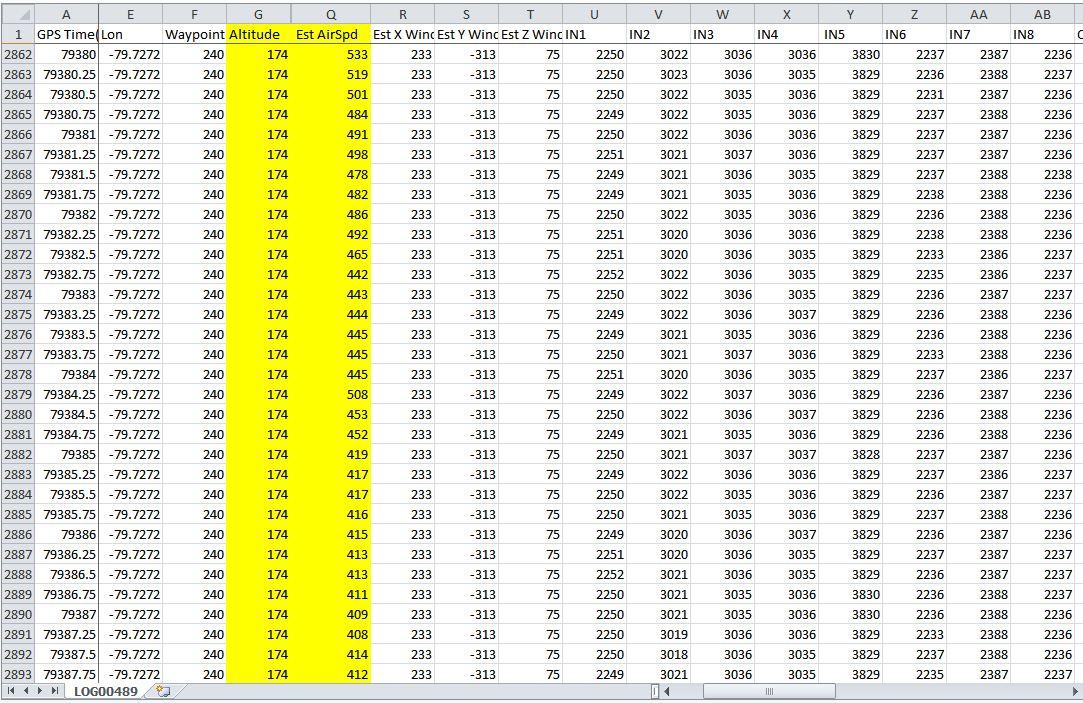
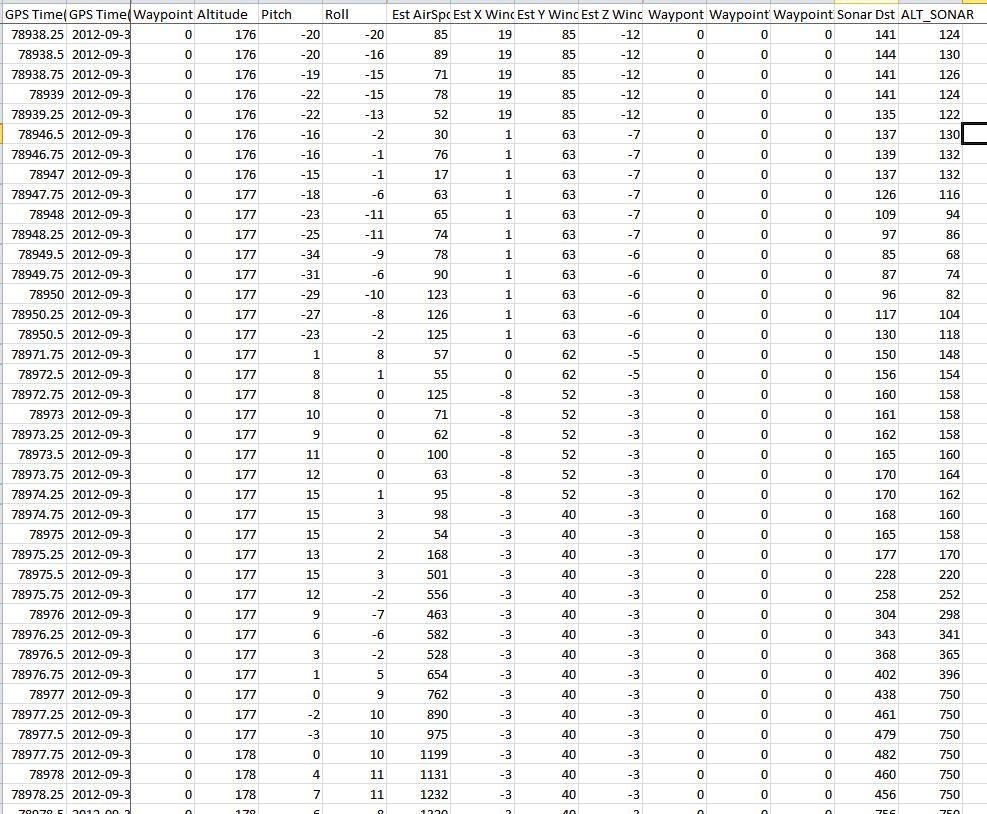
I enclose a spreadsheet and picture with the Sonar data from a test run today.
I simply was collecting data on how good the sonar is when flying close to the ground.
In general, the Sonar is marketed as having a range of 7.5 meters maximum. In practice, in my flight, over
a cut straw field (recently harvested; stubble 6 inches in length), shows that the Sonar is useful from around 18cm to
400 cm (4 meters) above the ground.
The product that I'm using is at this location.
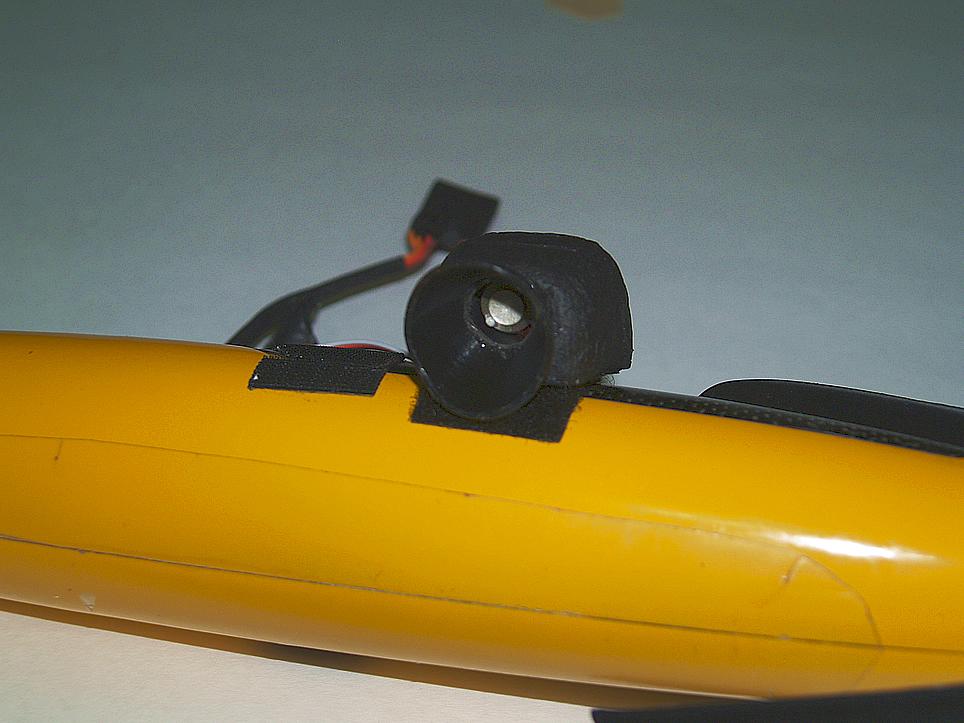
The Sonar is embedded in the bottom of the right wing of my Alpha Axion 3 inches to the right of the fuselage.
In this position it hopefully does not get soiled on landing.
Best wishes, Pete
Peter Hollands
William Premerlani
Peter Hollands
You wrote:- "To what do you attribute the "roller coaster" effect?"
Are you impuning my piloting skills

In the jpeg screenshot of the detail of the sonar for landing, the oscillations are induced by me.
I think that this Sonar device is on the borderline of being useful. i.e. it may not be.
An ideal ground detection device would overlap the GPS altitude error. To my mind GPS altitude error can be as bad as +/-30m. So Ideally ground detection would start to work at 60m of altitude. (e.g. LIDAR).
The Sonar on my plane seem absolutely reliable in flight (not on landing), for any measurement between 18cm and 250cm. Any such measurement in my data is true data. i.e. from 2.5 meters downwards.
If I assume a descent angle of 20 degrees for coming into landing, the plane is effectively flying blind down to 2.5m (because the GPS is not accurate). For a plane flying at 10m/s, the descent rate is 10*sin(20) which is 3.42 meters / second downwards. But we can only be sure of ground distance with the sonar at 2.5 meters. So we have less than 1 second to flare before hitting the ground. Which is too little.
In my own landing area, I would actually like to get to a point, where I can descend at 45 degrees (flaps, airbrakes, etc), and still do an auto-landing. So my conclusion really is that we need another device. The 7.5 meter range of that Sonar is really 2.5 meters in my experience.
Best wishes, Pete
William Premerlani
William Premerlani
Peter Hollands
To complete the record of this thread, I enclose a patch as a sample of how I did the sonar tests over the past couple of days.
Bill, I'm out of time for now to do the tilt plot. The cosine of the tilt is already in the second column of the spreadsheet. It is multiplied by 2. So instead of 16384, you will see 32768 when the tilt angle is zero. The third colum is the calculated height, allowing for tilt, in centimeters.
I'm back into my day job again for a while, so this project will be on hold for a while.
Best wishes, Pete
DB
DB
William Premerlani
Peter Hollands
"Transfer Functions": On further thought this may / may not be relevant to this discussion.
Here is my line of thinking:-
- Sonar only works over a limited range in my field (18cm to 400cm (4 meters or about 12 feet).
- Sonar only updates at 10Hz and some filtering may be required
- Hypothesis - We will need optimal height control to achieve a good landing. How can we do that ?
- Determine the mathematical function that describes pitch control of the aircraft (manual mode).
- Create a transfer function that describes the response of the auto-pilot.
- Put both transfer functions in to block diagram control model in Xcos to simulate the control system. (Xcos is opensource code that has some of the functionality of simulink. Xcos is part of Scilab. Scilab is open source softwarer with some of the funcitonality of Matlab (free but less capable).
- Use Xcos to optimise the PID's for pitch control and potentially throttle control.
- Potential flaws in the above bullet point ....
- Height Control requires both Throttle and pitch control. It is not SISO (Single Input, Single Output). Throttle control is actually relatively slow to respond. Feed forward is important for precision
- Transfer functions require LTI (Linear Time Invariant) functions. The equations describing flight near a stall are probably not linear.
- We are probably more concerned with Descent Rate than Height Control in the final moments of landing. And that is what your "glide slop" solution already does. It may be that we simply want to change the glide slope when we arrive at 4 meter above the ground - and arrange for the plane to have a high drag ration at this time, so that it quickly loses speed, loses speed and meets the ground. The test plane should have forgiving stall characteristics initially. [KISS (Keep It Simple Stupid).]
So really, all we need for that would be:-
- Sanity Check the Sonar data during phase 1 glide descent. Keep the glide slope at less than 20 degrees so the rate of descent is not to quick.
- Spot the 4 meter mark above the ground reliable during phase 1 glide descent.
- Change the glide angle within 1/2 a second to be say 0 degrees, so that the plane is now gliding at 2 meters above the ground. With high drag, and forigiving stall, it should land. You still need to be sure that pitch control is Optimal to achieve a 15 degree pitch change within at least 1/2 a second. So may be all the transfer function work will still be useful.
Best wishes, Pete

ben levitt
add its name into the enum at the top of flightplan-logo.c, and then
add a case: for that value into logo_value_for_identifier(). See this
svn revision that added 2 values. (And ignore the switch from using
#defines to using an enum.)
http://code.google.com/p/gentlenav/source/detail?r=1558
Ben
Peter Hollands
Pete
Peter Hollands
I enclose a patch for altitudeCntrl.c and telemetry.c, which should ensure that I get only good data from the sonar at my landing field. I reject any sonar values above 4 meters. And I only accept values below 4 meters if there are at least 3 consecutive reading below 4 meters. From analysis of my previously captured samples, that should be fine. I shall do some flights tomorrow and analyze the telemetry to make sure that it is correct and that I only get good and valid sonar for height above ground.
Then ....
I hope to add the variable "sonar_height_to_ground" (an integer - see enclose patch ) into Logo.
Then ...
I shall go and re-use the DIY competition winning automatic take off and landing Logo scripts from last November.
During the landing glide of the Logo script, I shall set up an "Interrupt for final glide" using Ben's new Interrupt feature in Logo. The Interrupt will be triggered by sonar_height_to_ground being less than 4 meters. The Interrupt subroutine will then set a new waypoint, about 100 meters down the field, which is at the same height as the plane. So the plane will attempt to glide horizontally, with no glide slope. It will slow down, and in my case, my plane should gracefully stall / land.
Stay tuned ....
Best wishes, Pete
William Premerlani
Peter Hollands
Thanks for making me re-consider.
I agree that updating the DR positiong is the pure and neat generic algorithm to use. But I think with current sonar we are boxed into a different solution. e.g. For Lidar, I think we can look at updating the DR.
With Maxbotix sonar the limitations are:-
- there is not enough flight time / sonar range to effect a smooth alteration of the dead reckoning position, when effecting a landing flare.
- The relationship between Sonar height above ground, to GPS Height, requires an on board terrain altitude map.
(or at least a model which could be that the ground is flat, has altitude H in a given defined rectangle of LAT,Long.).
In effect the algorithm that I plane to use today says "If you are landing, do not plough straight into the ground. When you see the ground, pitch up a little and glide".
Lets take some numbers and assume that we landing near the Origin, and true ground altitude is origin altitude:-
Time: T=-3 seconds, Real Height of Plane:10meters, GPS: 20 meters, Sonar: Out of Range, DR 20 meters
Time: T=-2 seconds, Real Height of Plane: 7 meters, GPS: 17 meters, Sonar: Out of Range, DR 17 meters
Time: T=-1 seconds, Real Height of Plane: 4 meters, GPS: 14 meters, Sonar: 4 meters. , DR ???? Start to change ?
Time to Flare the plane immediately
We will not want to instantly change the DR as a very sudden change will cause an overshoot in the controls.
A gradual change is required to dead reckoning.. But then we will hit the ground.
Time T=0 seconds. Plane has to be flared and about to land. Airspeed bleeding off. Plane flying horizontally.
Best wishes, Pete
DB
Hi Pete.
What’s Lidar?
Hope you won't get tired of my dumb questions and requests.
Bill, from another viewpoint, the use of sonar in a LOGO control way can provide for a quick and easy testing opportunity ..through the landing scenarios, like Pete mentioned, with real-world results, e.g., probing the sonar device’s data feed integrity and consistency, the different approaches to best effect consistently soft auto-landing during its demanding stages, and so on. Thereafter, the component can be added to the DR algorithm as suggested, as well as in whatever alternative uses discovered during the testing.
Pete, you’ve got me holding my breath now. I’m also trying to rush my glider (adding the sonar sensor) for tomorrow, hoping for a favorable weather.
Progress: So far, I’ve applied the patches across all the codes down to my LOGO flight plan, incl. Ben’s suggestions. Everything compiled smoothly and looks promisingly good. As bonus this has helped me gain a bit more understanding of the structure of MP and how to go about adding simple enhancements. Thanks for the opportunity.
All the best.
Peter Hollands
From Wikipedia:-
LIDAR (Light Detection And Ranging, also LADAR) is an optical remote sensing technology that can measure the distance to, or other properties of a target by illuminating the target with light, often using pulses from a laser.
It seems to be too epensive or too large for our use at the moment.
Best wishes, Pete
Peter Hollands
There is a bug in my latest patch which I will fix later today.
The bug does not effect flight worthiness. It is still safe to fly.
But it does mean that the code does not wait for 3 complete and good samples
before recognising and passing through the good samples the main sonar ground height variable.
The PWM code for the Sonar should be receiving new PWM updates at 10Hz (as specd by Maxbotix). (I have not verified that directly). That code is in radio_in_udb4.c and is running at a high interrupt priority of 6. So I do as little as possible to just capture the value of the PWM sonar timer and store it away. I need to let that code return from interrupt, so all the other high value priority interrupts ( radio transmitter channel inputs), remain unaffected and non-blocked.
The altitudeCntrl.c code is running at 40Hz. That is where I turn a PWM UDB timer value into centimeter to target.
I do the addional work in this thread of code, to keep the PWM input in radio_in_udb4.c to a minimum. The altitude control code is running as part of the main stack of code that is controlling the plane. See here for the call out to the main routines.
But at the moment there is not link or flag between the radio_in_udb code and the altitude_control code, to say that a new and different sonar reading has just been read. I shall fix that this morning and run another flight test.
FYI: The interrupt table, interrupt frequencies, and their priorities are recorded in this document, accessible via this page on the Wiki.
Best wishes, Pete
Peter Hollands
I fixed the bug. And then flight tested, and verified that the logic is working correctly. I am now getting a good signal from the sonar when and only when the ground is less than 4 meters away. This is true for my airfield which is a freshly cut barley field with straw stubble sticking up 6 inches from a muddy field. The ground is dry.
Its the weekend, and I am probably 5-8 hours hours ahead of you in timezone. I wanted you be able to access my code in case you also have time experiment today / tomorrow.
I have now created a branch for MatrixPilot_sonar and it is now at the point where it has (theoretically) got Logo support.
I have not yet written or tried any Logo automated landings.
The basic idea it to interrupt a normal F_LAND sequence when the ( SONAR_HEIGHT < 400 cm ) at which point the flightplan should make a note of the current position, and create a waypoint about say 100m further on at the same height and proceed there with F_LAND still enabled. If that further waypoint is reached, I planned to program in a "Go Around" flight plan, as in my case the plane will be running out of airfield to land.
Best wishes, Pete
Peter Hollands
Best wishes, Pete
// Simple Example of using LOGO to fly an OVAL pattern and try to land, but
// go around again, when sonar detects ground 4 meters away. Untested !
#define RIGHT_180 1
#define GO_AROUND 2
const struct logoInstructionDef instructions[] = {
SET_ALT(20) // Set Altitude at 20m
FD(100)
REPEAT_FOREVER // Embark on a an oval shape. Forward 100m
DO(RIGHT_180) // Turn around by 180 degrees of a circle
FD(100) // Go back 100m
DO(RIGHT_180) // Do another graceful 180 degrees of a circle to finish Oval.
FLAG_ON(F_LAND) // Engine Off, and don't ever go up
SET_INTERRUPT(GO_AROUND) // Standby with the interrupt routine, to go around when ground detected
SET_ALT(-32) // In the mean time set altitude 32m under ground and
FD(100) // Aim for that point 100 meters away.
CLEAR_INTERRUPT // If you get to that point (you should not), forget the go around, repeat this plan.
END
END
TO (RIGHT_180) // A subroutine for executing a nice 180 degree turn around a circle
REPEAT(18) // Do this 18 times (turning 10 degrees for 180 degrees)
FD(10) // Go forward 10 m
RT(10) // Right Turn 10 m
END
END
TO (GO_AROUND) // Interrupt routine for Going Around
IF_LT(SONAR_HEIGHT, 400) // If ground is less than 400 centimeter (4 meters away)
FLAG_OFF(F_LAND) // Switch the motor back on.
SET_ALT(20) // Set desire altitude to be 20m above ground level
END
END
} ;
Peter Hollands
The basic mechanisms are working after doing 1 test flight. The Sonar worked correctly and detected the ground. The Interrupt Subroutine of Logo was immediately then run. Unfortunately I then reached my end waypoint anyway, and also I was about to hit trees in my landing area. So I could not let my plane go around and around testing itself. I will need to find another test site, for this low level work which does not have trees in the middle of the airfield.
I'm done for this weekend. Everything that I have done is now in the sonar_branch repository, including my flight plan.
You may want to review the change log.
I've added some additional test sonar telemetry to the end of SERIAL_UDB_EXTRA, so that I have everything to analyze in one file for these test runs. That probably requires the 57600 telemetry baud rate (that I've been using) for the system not to lose characters when sending to the OpenLog. 57600 baud operations require OpenLog to be using the 3.x firmware not the old 2.x firmware which did not support 57600 baud rates correctly.
Best wishes and happy flying, Pete

MIG-29
What do you think about actually integrating a homemade radio
altimeter instead of using the sonar?
We could go to something along the lines: http://lea.hamradio.si/~s53mv/avnr/adesign.html
This would give a much better altitude reference than the sonar and at
way longer ranges...
Best regards!
> >>> 2. enhancing logo to include:
> >>> 2.1. sonar detected altitude systems value for conditionals,
> >>> e.g., IF_LE(ALT_ZNR, 0.5) m or cm
> >>> 2.2. flare pitch up function to be used in conjunction, e.g.,
> >>> PITCH_UP(10)... SET_SPEED(x)... FLAG_ON(F_LAND)
> >>> 2.3. a take-off position (USE_TAKEOFF_POS similar to
> >>> USE_CURRENT_POS) and take-off angle (USE_TAKEOFF_ANGLE...)
>
> >>> ..all for the purpose of enabling real precision landing within logo
> >>> waypoints (perhaps, eventually MAVLINK).
>
> >>> I'd like to do these myself and can use some help and directions on the
>
> >>> It'll be a bit of an uphill climb for myself and maybe a bit ambitious
> >>> as haven't used c for quite a while for the past 20 yrs.. Some design
> >>> materials on the WIKI might give me a good start, in addition to any
> >>> directions from the group.
>
> >>> Best wishes.
> >>> Daniel
>
DB
~~~DO_ARG(CM_AUTOLAND,200)
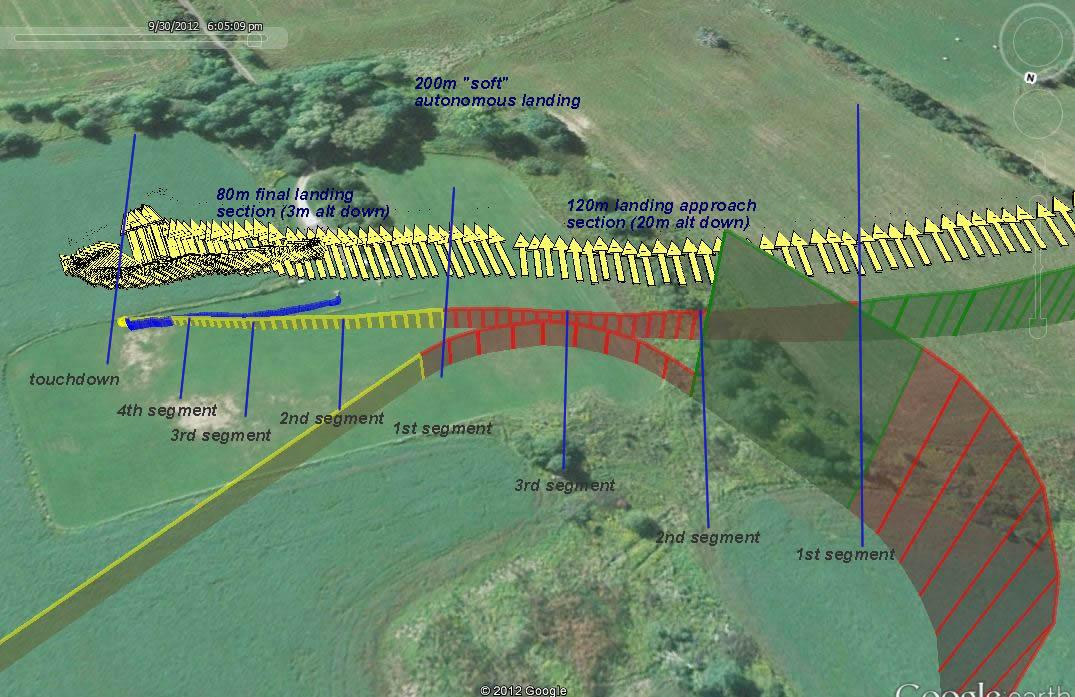
FLAG_ON(F_ALTITUDE_GOAL)IF_LT_PARAM(190) // 190m is minimum landing strip lengthPARAM_SET(190)ENDFLAG_ON(F_LAND)PEN_UPUSE_CURRENT_POS // aim for the current flightplan x,y position target, SHOULD/WILL BE REPLACED BY TAKE_OFF_POSUSE_ANGLE_TO_GOAL // aim for the current flightplan angle target, SHOULD/WILL BE REPLACED BY TAKE_OFF_ANGLE//USE_CURRENT_ANGLEBK_PARAM // use parm to move back from target position as routine's landing span limitPARAM_DIV(8)PARAM_SUB(5)SET_ALT_PARAM // At 200 param, this is 20 m altFLAG_ON(F_LAND)PARAM_DIV(2)PARAM_SUB(2) // At 200 param, this is 8 m alt DOWNALT_DOWN_PARAMPARAM_MUL(8) // At 200 param, this forward by 64 mFD_PARAMPARAM_DIV(6)PARAM_SUB(3) // At 200 param, this is 8 m alt DOWNALT_DOWN_PARAMPARAM_MUL(8) // At 200 param, this forward by 64 mFD_PARAMPEN_DOWNIF_LT(ALT_SNR, 400) // After 128 m distance and cont. descend, check altitude using sonar data and if less than 4mFLAG_OFF(F_LAND) // throttle up for some flare trajectory to moderate descend,SET_ALT(5) // SHOULD/WILL BE REPLACED BY PITCH_UP/DOWN_(X ANGLE)ENDFLAG_ON(F_LAND) // Throttle off and continue powerless glide, SHOULD/WILL BE REPLACED BY THROTTLE_UP/DOWN_(X%)DO_PARAM(CM_LAND_SNR)
PARAM_ADD(16) // allocate about 80 metersPEN_UPUSE_CURRENT_POS // aim for the current flightplan x,y position target, TO BE REPLACED BY TAKE_OFF_POSUSE_ANGLE_TO_GOAL // aim for the current flightplan angle target, TO BE REPLACED BY TAKE_OFF_ANGLE//USE_CURRENT_ANGLEBK_PARAM // start exec. of script 80 meters from goalPARAM_DIV(3)FD_PARAMIF_LT(ALT_SNR, 270) // After 130 m If altitude from sonar is less than 2.7 mFLAG_OFF(F_LAND) // throttle up, flare andSET_ALT(4) // moderately level the descend slopeELSESET_ALT(3)ENDPEN_DOWNFLAG_ON(F_LAND)FD_PARAMIF_LT(ALT_SNR, 138)//FLAG_OFF(F_LAND)SET_ALT(2)ELSESET_ALT(2)ENDFD_PARAMIF_LT(ALT_SNR, 50)FLAG_OFF(F_LAND)SET_ALT(2)ENDFLAG_ON(F_LAND)
Peter Hollands
Hi Daniel,
Thanks for sharing that. I think you are well ahead of me on sophisticated Logo.
I see you are using a very different approach to the flight plan. You relying on GPS being accurate to within 1 meter for landing and sonar is used to confirm height at 1.38 m and 0.5m .
If GPS in your area is really that accurate, then Bill's comment about fusing sonar data into IMU position may be a neater solution in the long term.
I recomend using a fixed origin. That is highly recommend for consistency of position and altitude.
My flightplan was very different and assumed poor GPS altitude accuracy, and circumvented occasional false "out of range" readings on sonar on landing. I used sonar to just create a single state change to final flare.
I am really enjoying working with you on this. Thanks for pointing out the potential compile bug
I'll test the sonar branch for that.
I will change my Logo noun from SONAR_HEIGHT TO ALT_SNR to keep compatibility of scripts.
Ben, please confirm your view on that as we are adding to the Logo API.
Best wishes Pete
ben levitt
<peter.h...@gmail.com> wrote:
> I will change my Logo noun from SONAR_HEIGHT TO ALT_SNR to keep
> compatibility of scripts.
>
> Ben, please confirm your view on that as we are adding to the Logo API.
it. I think it might be more clear with SONAR spelled out, as
ALT_SONAR.
Also Pete, I think your installation looks great! If it ends up
working well for you, I think I'll add sonar to one of my planes too!
Ben
Peter Hollands
I have made a few more changes in the sonar branch tonight
- Ensured SERIAL_UDB_EXTRA compiles correctly when sonar not enabled.
- Ensure flight plans with ALT_SONAR statements fail to compile if sonar not enabled.
- Ensure code cannot be used (for now) with non UDB4 boards. The UDB4 had the extra timer that I needed for the sonar's PWM. I'm not sure the UDB3 has any spare timers.
Ben the ALT_SONAR code in logo_flightplan.c uses conditional compiler directives in the ENUM and CASE statements. (see excertpt from patch below). I hope that is OK. (That is one of the advantages of using ENUM).
Best wishes, Pete
==============================
--- /branches/MatrixPilot_sonar/MatrixPilot/flightplan-logo.c Sat Sep 22 06:59:43 2012
+++ /branches/MatrixPilot_sonar/MatrixPilot/flightplan-logo.c Mon Sep 24 11:07:34 2012
@@ -51,7 +51,9 @@
DIST_TO_HOME = 16,
DIST_TO_GOAL,
ALT,
- SONAR_HEIGHT,
+#if ( USE_SONAR_ON_PWM_INPUT_8 == 1 )
+ ALT_SONAR,
+#endif
CURRENT_ANGLE,
ANGLE_TO_HOME,
ANGLE_TO_GOAL,
@@ -564,8 +566,10 @@
case ALT: // in m
return IMUlocationz._.W1 ;
- case SONAR_HEIGHT: // in centimeters
+#if ( USE_SONAR_ON_PWM_INPUT_8 == 1 )
+ case ALT_SONAR: // in centimeters
return sonar_height_to_ground ;
+#endif
case CURRENT_ANGLE: // in degrees. 0-359 (clockwise, 0=North)
return get_current_angle() ;
DB
enum {~~~ALT_SONAR,~~~};~~~int logo_value_for_identifier(char ident)~~~case ALT_SONAR: // in cm
#if ( USE_SONAR_ON_PWM_INPUT_8 == 1 )
{return sonar_height_to_ground ;}#else{int sonar_height_to_ground = 0; // arbitrary value to test presence of sonar}#endif~~~
~~~IF_LT(LOGO_B_CHANNEL,3100) // Less than middle positionIF_GT(ALT_SONAR, 0) // use sonar if presentIF_LT(ALT_SONAR, 300) // if less than 300cm do autotakeoffDO_ARG(CM_CC_TAKEOFFRECT, 135)ENDELSEIF_LT(ALT, 3)DO_ARG(CM_CC_TAKEOFFRECT, 135)ENDEND~~~
~~~~IF_GT(ALT_SONAR, 0) // Sonar attachedIF_LT(ALT_SONAR, 400) // After 128 m distance and cont. descend, check altitude using sonar data and if less than 4mFLAG_OFF(F_LAND) // throttle up for some flare trajectory to moderate descend, apply a bit of brake as well,SET_ALT(4) // SHOULD/WILL BE REPLACED BY PITCH_UP/DOWN_(X ANGLE) and THRUST/THROTTLE..ENDELSEIF_LT(ALT, 4) // Use ALT if no sonar is attched, pray and cross your fingersFLAG_OFF(F_LAND)SET_ALT(4)ENDEND~~~~
DB
Peter Hollands
Best wishes, Pete
DB
Peter Hollands
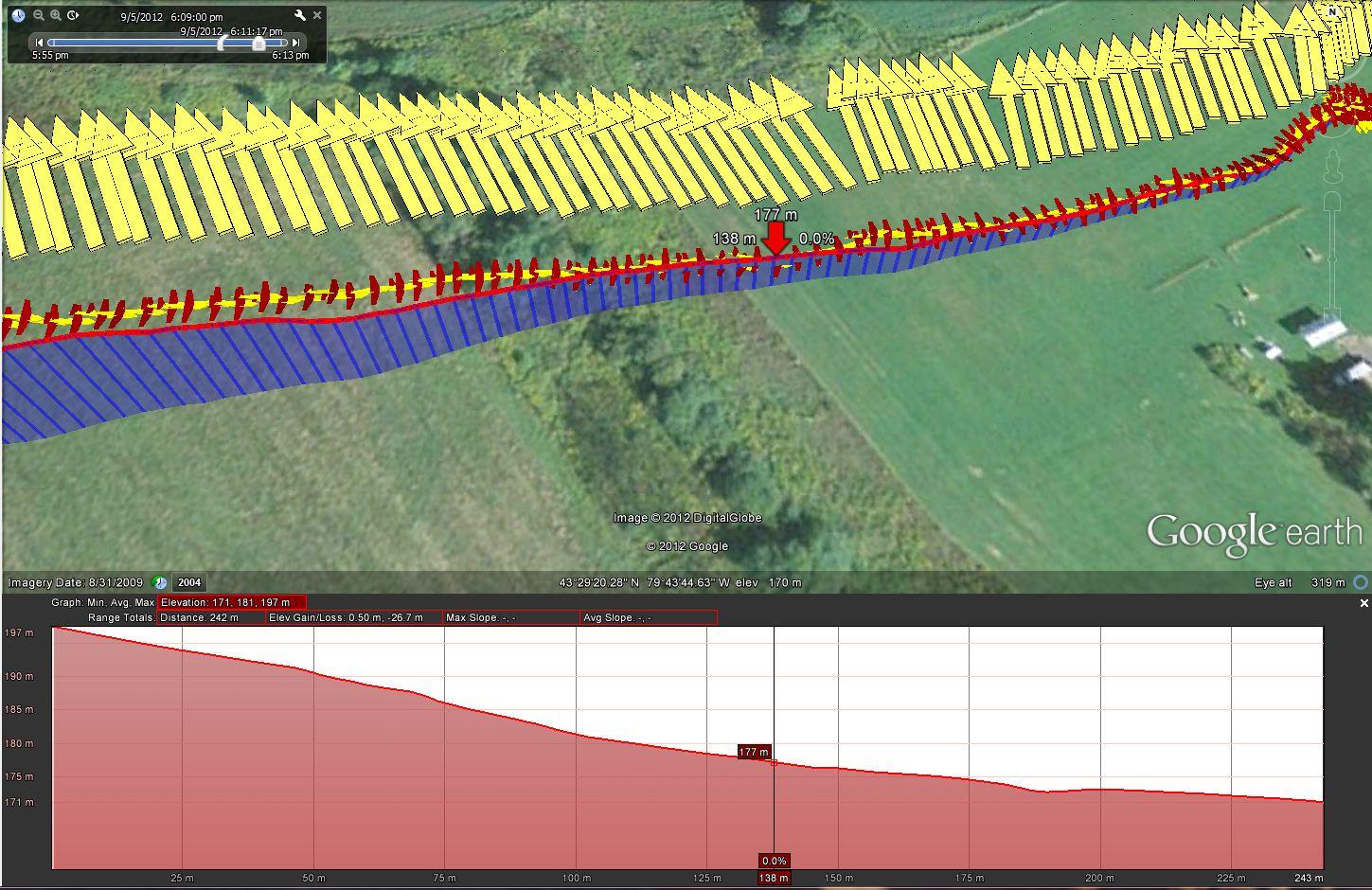
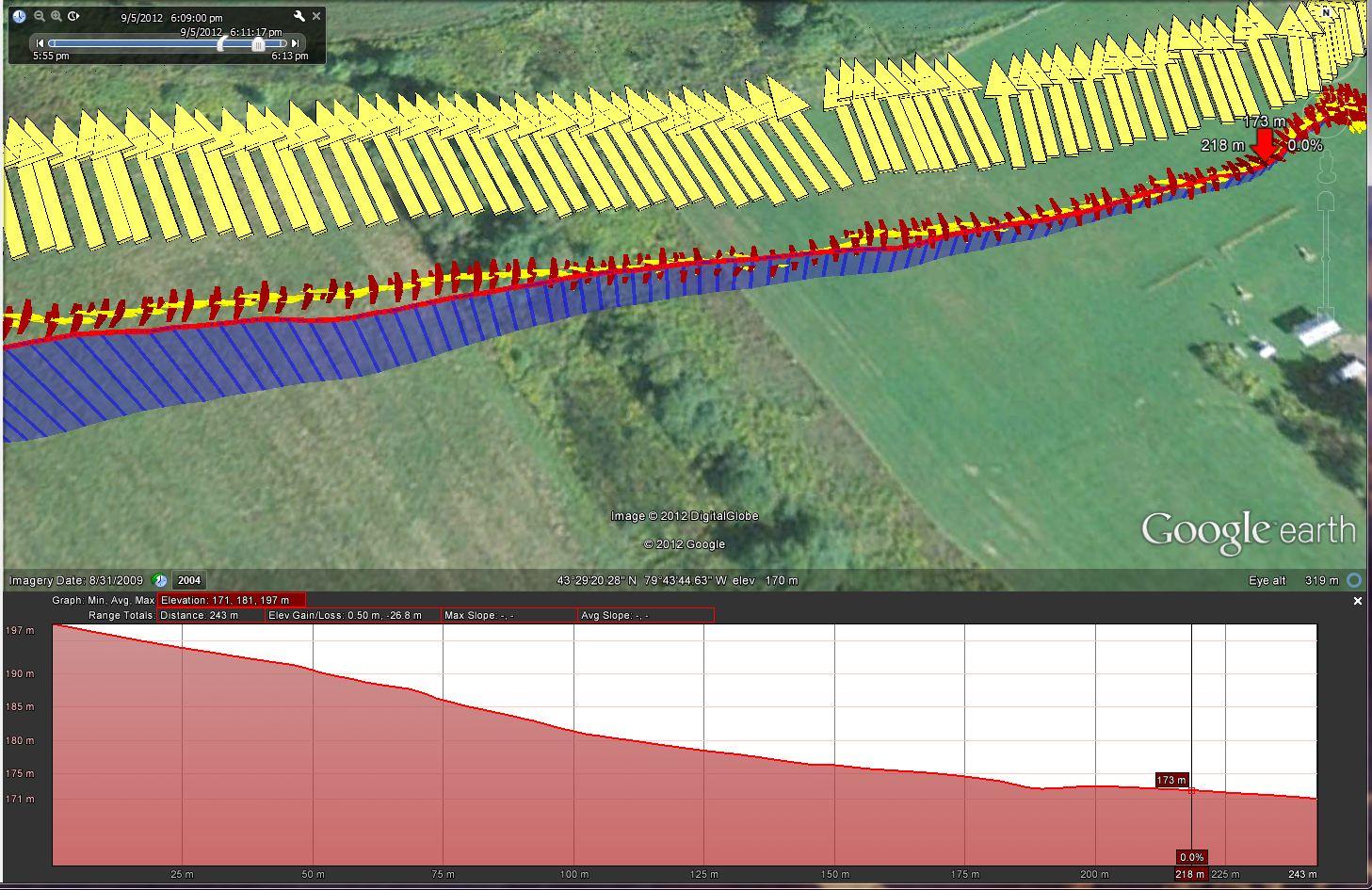
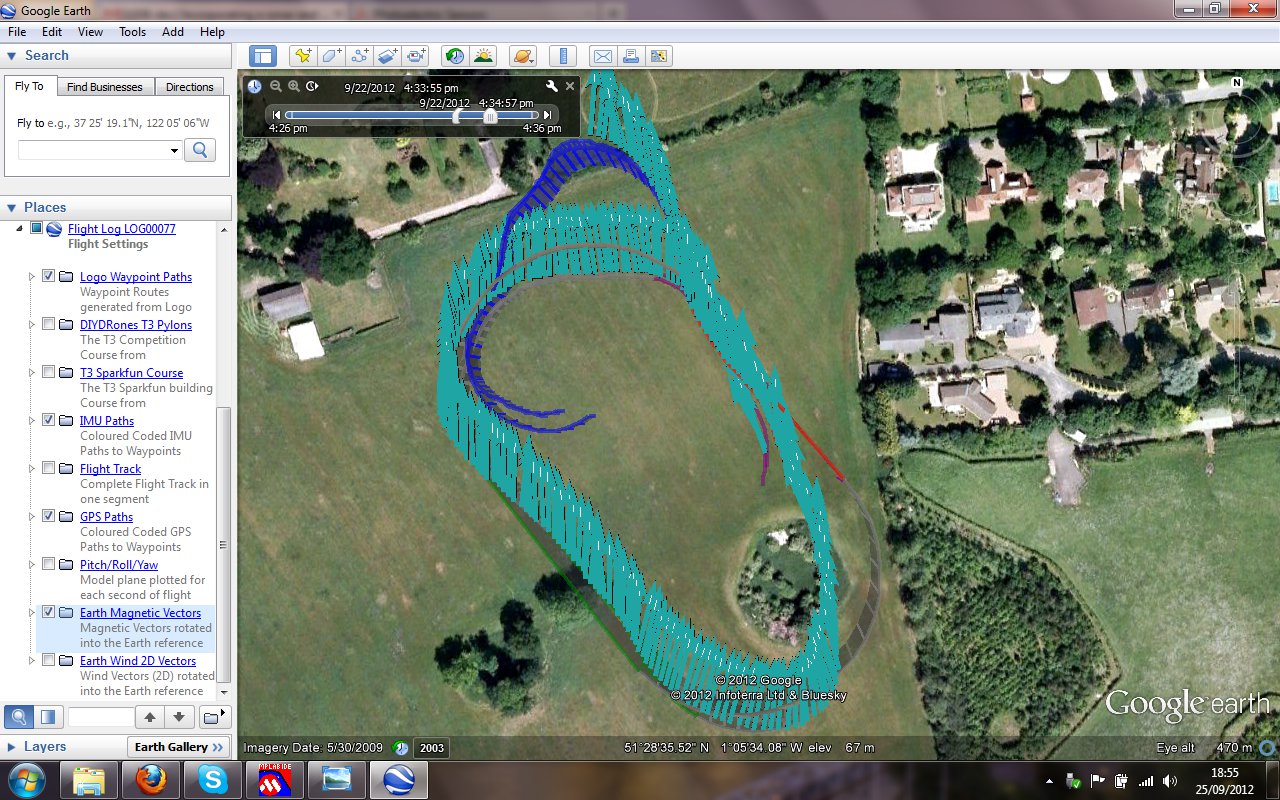
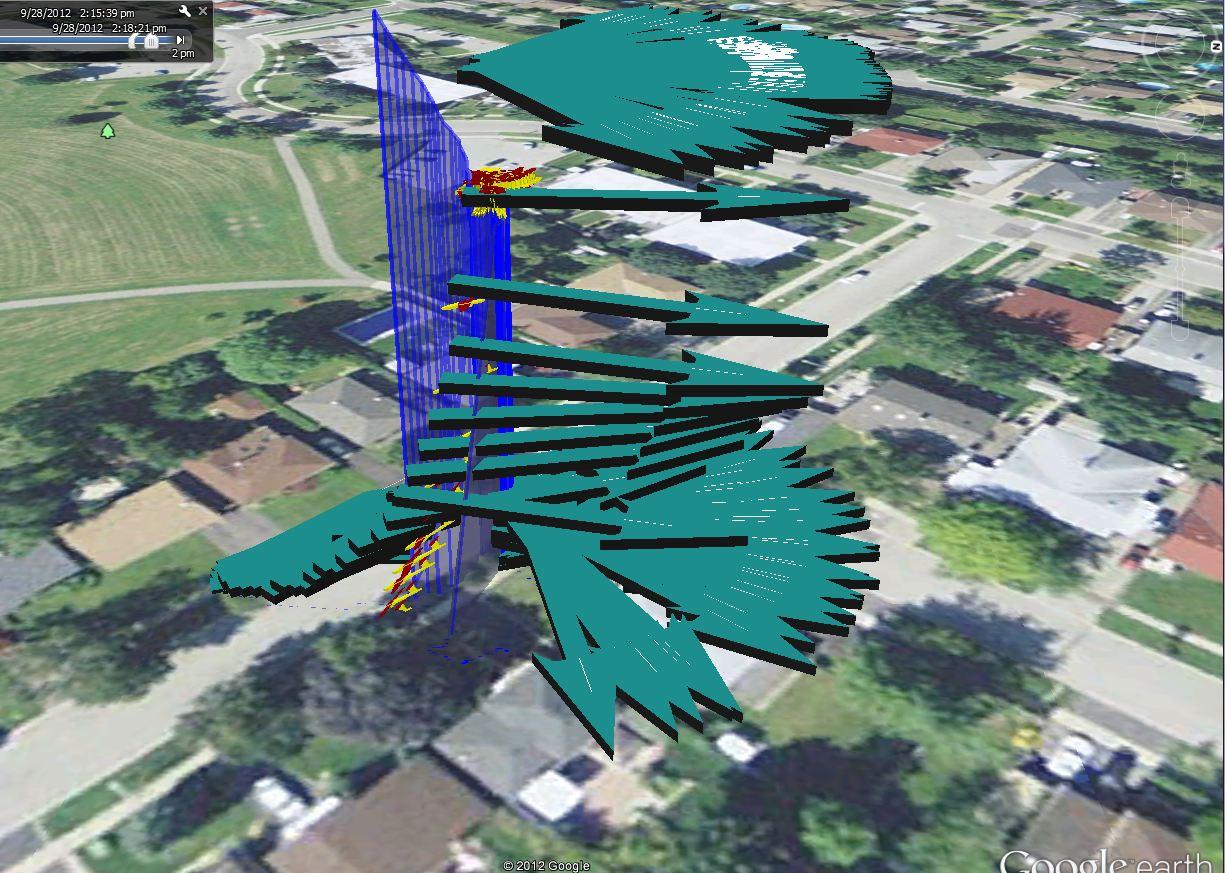
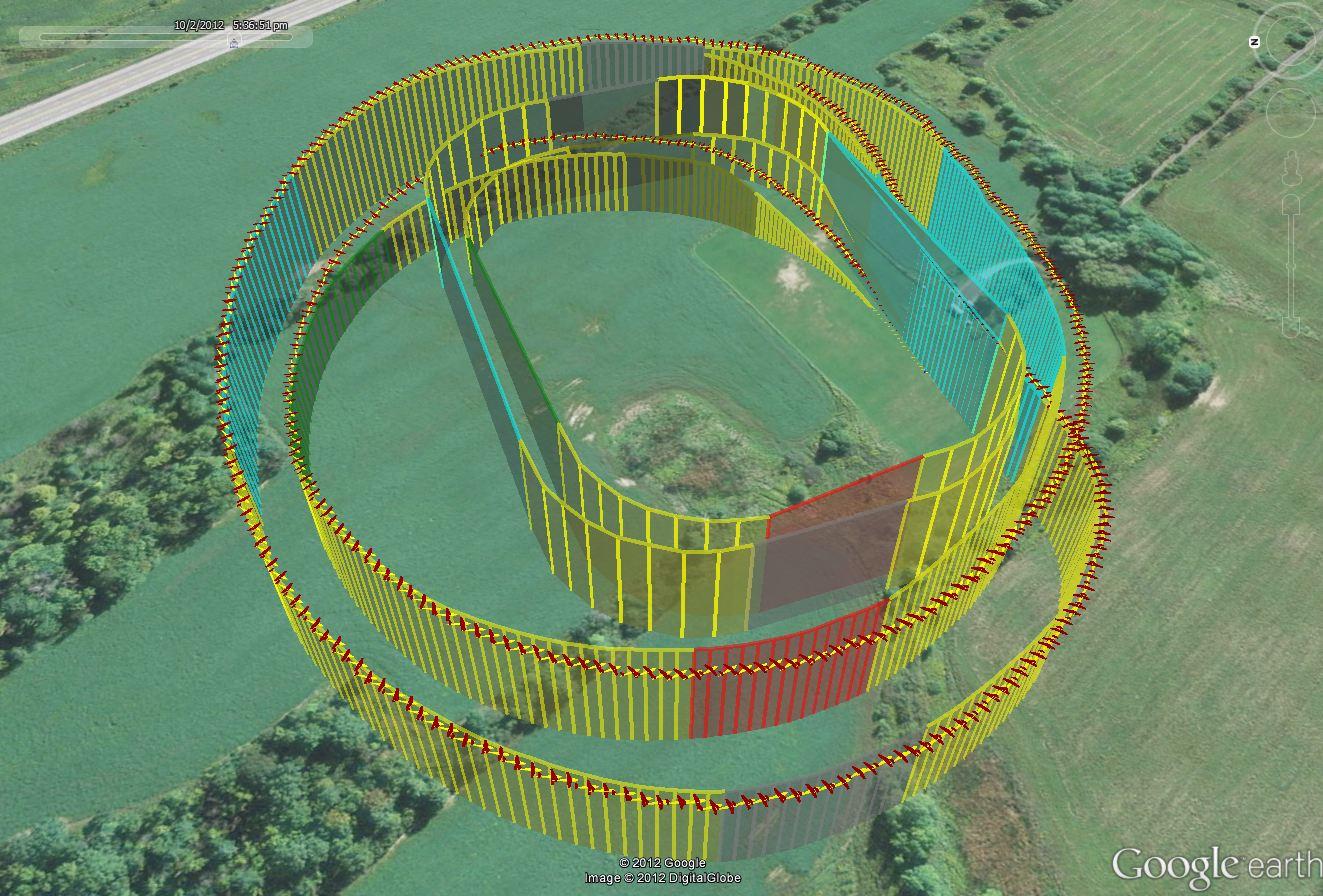
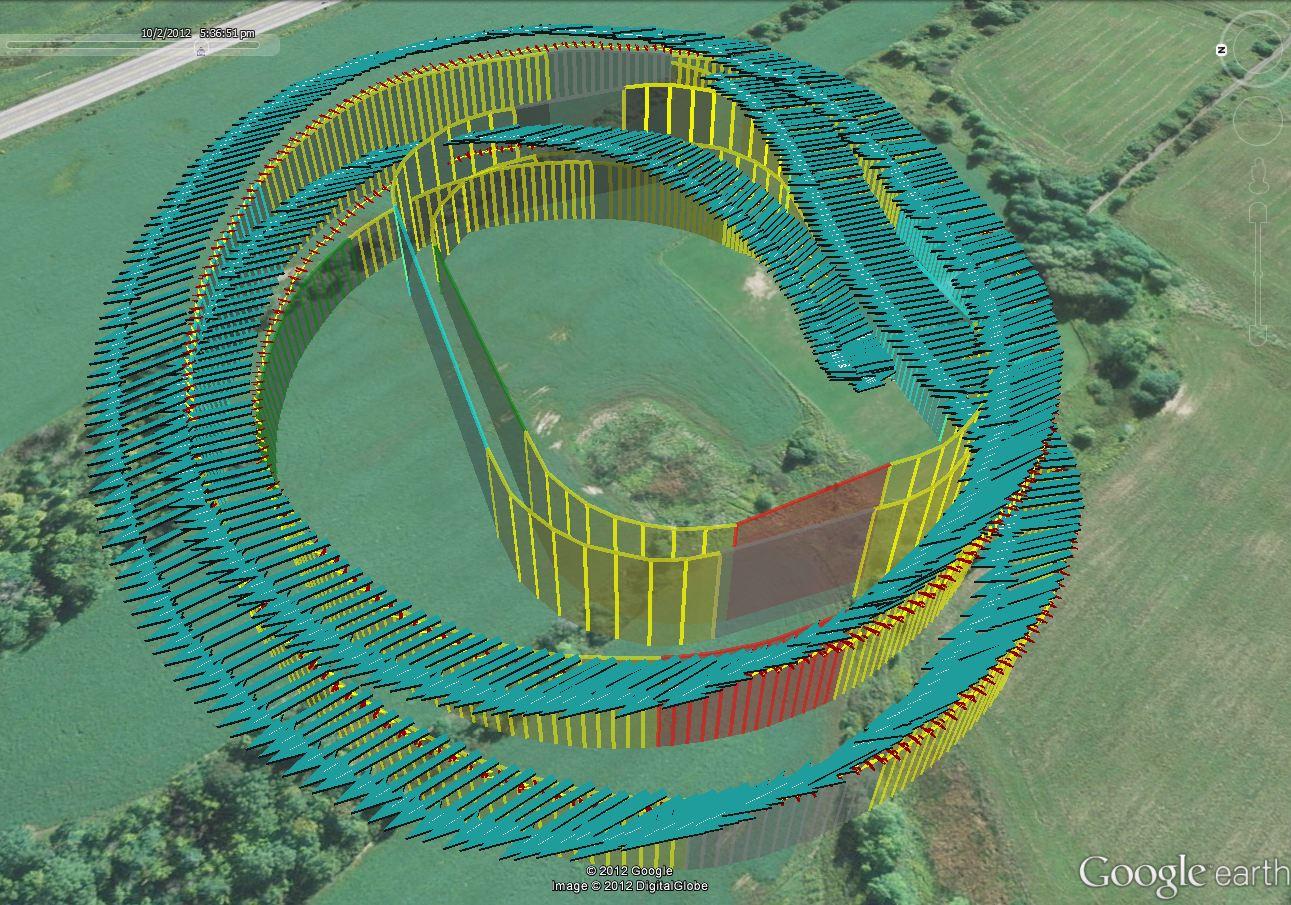
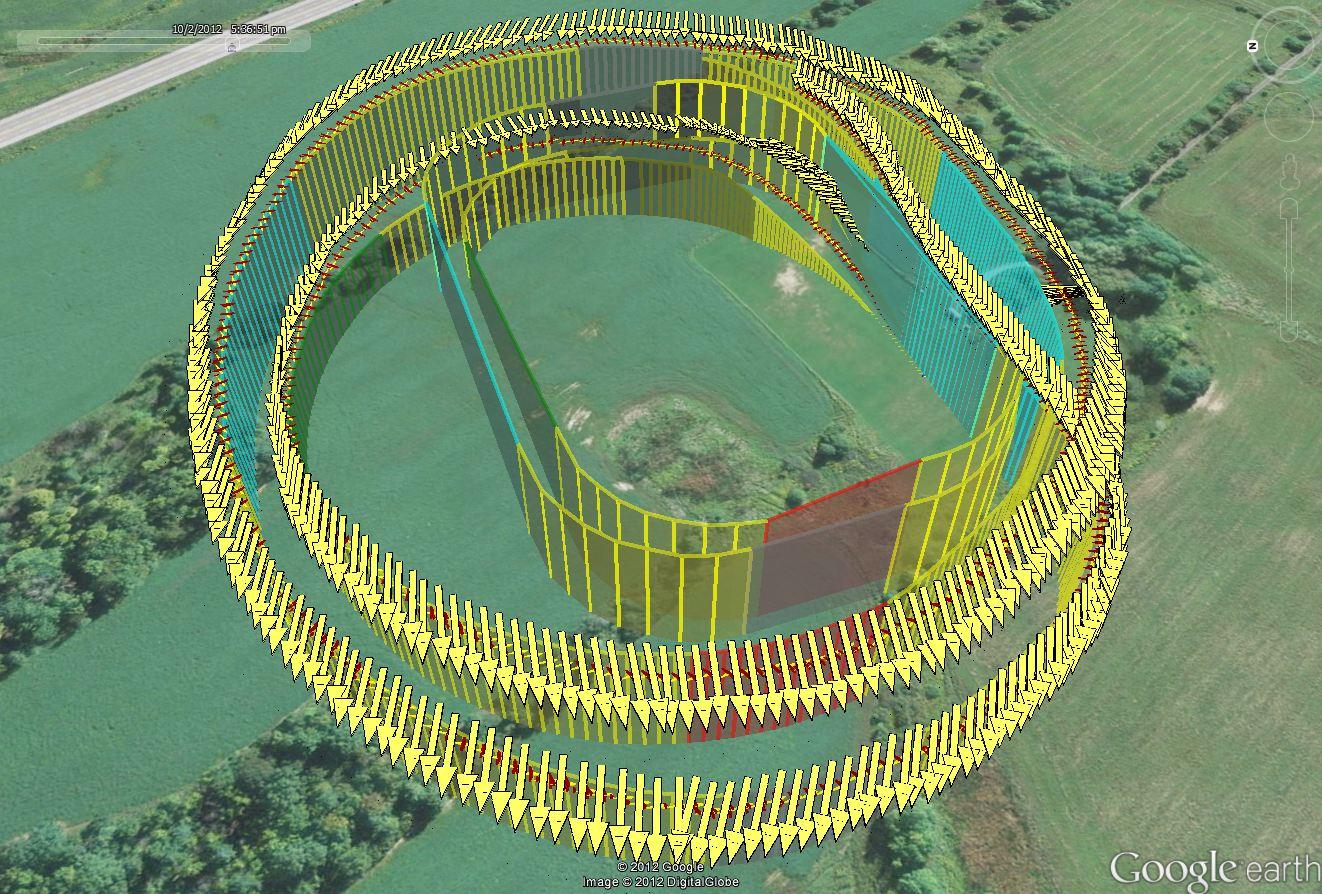
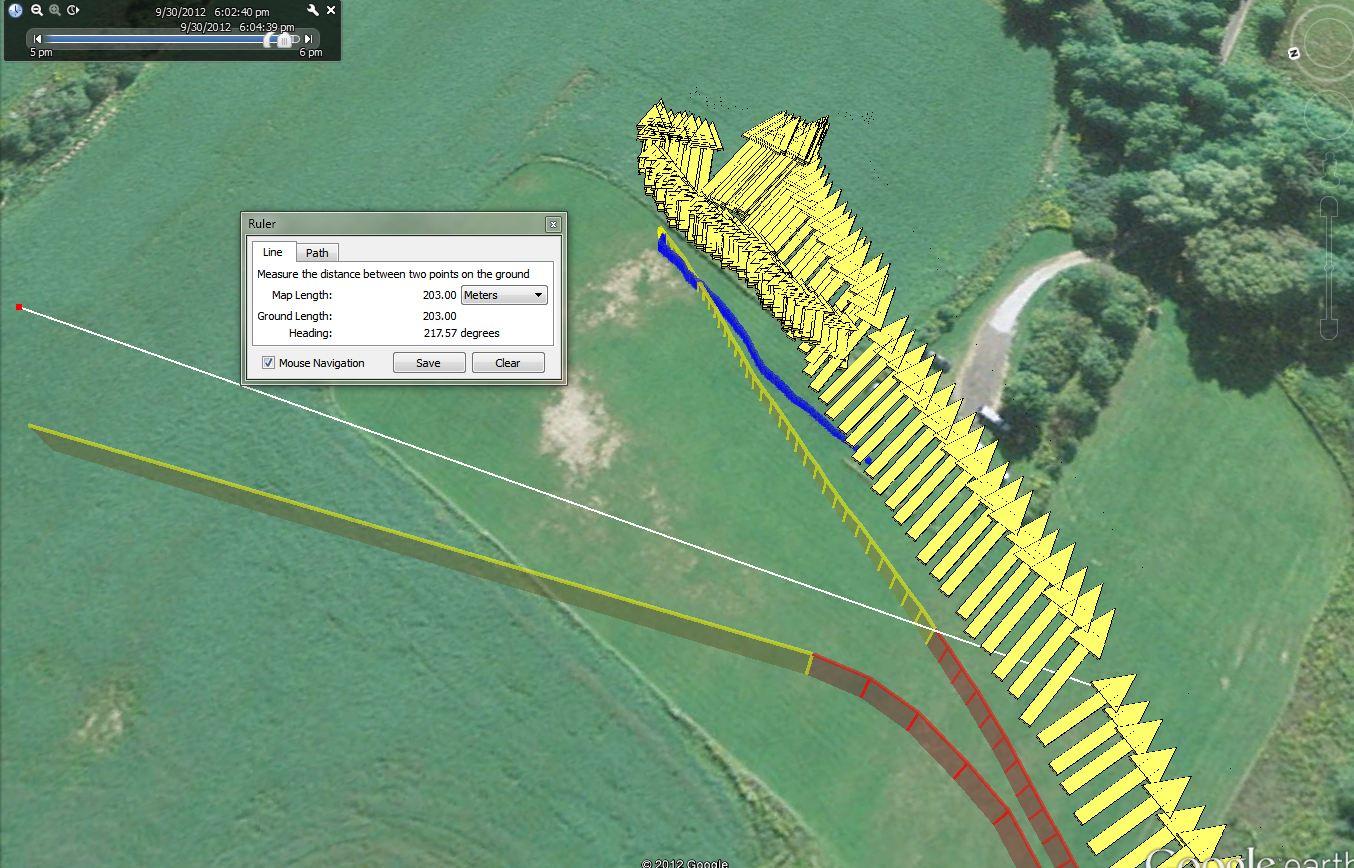
The best way to assess your own installation of the magnetometer, is to switch on the magnetometer vectors in Google Earth. If they all point North for the entire flight, then your magnetometer is fine. It rarely does point perfectly North.
I enclose a typical Google Earth Magnetic Vectors view from my most recent flight.
Best wishes, Pete
P.S. if we want to carry on discussing magnetic vectors we should really start a new thread.
DB
DB
Hi Pete, greetings all.
Wish you good flights and a great weekend!
Peter Hollands
- Anti -Dizzy logic. Or "How to make an IMU still work correctly when it's put on a spinning record player".
- Automatic Gyro gain calibration.
- HIgh Bandwidth Dead Reckoning.
DB
DB
Peter Hollands
Originally, I only coded for PWM not PPM. Kempo has also asked for PPM and I have now added that capability to the sonar branch. As in this set of changes .....
If you are using subversion, you will only have to do a "SVN Update" of MatrixPilot_sonar, and you your code will be updated to work with PPM as well as PWM.
If you use PPM with my initial code, then the Sonar will only return "0" cm, which is exactly the symptoms that you describe.
Please Note: It may be that initialisation of the sonar is important. In my case, my plane is always booted up on a wooden stand which prevents the plane from moving if the engine were to switch on, keeps the plane off of wet grass, and also helps to keep it level on bootup. This means that my sonar is always at least 18cm from the ground on bootup, and so it can easily calibrate.
For Kemp's sonar, which is an older Maxbotix and a different model number, he has discovered that booting up with zero distance between the wing and the ground is a bad idea. I have never seen that because of the typical way that I operate with my wooden stand. He gets much better bootup results when the Sonar can initially calibrate with a distance between sonar and the ground.
Magnetometer you can live without. Poor or mal-functioning GPS needs to be fixed.
Best wishes, Pete
DB
DB
DB
Peter Hollands
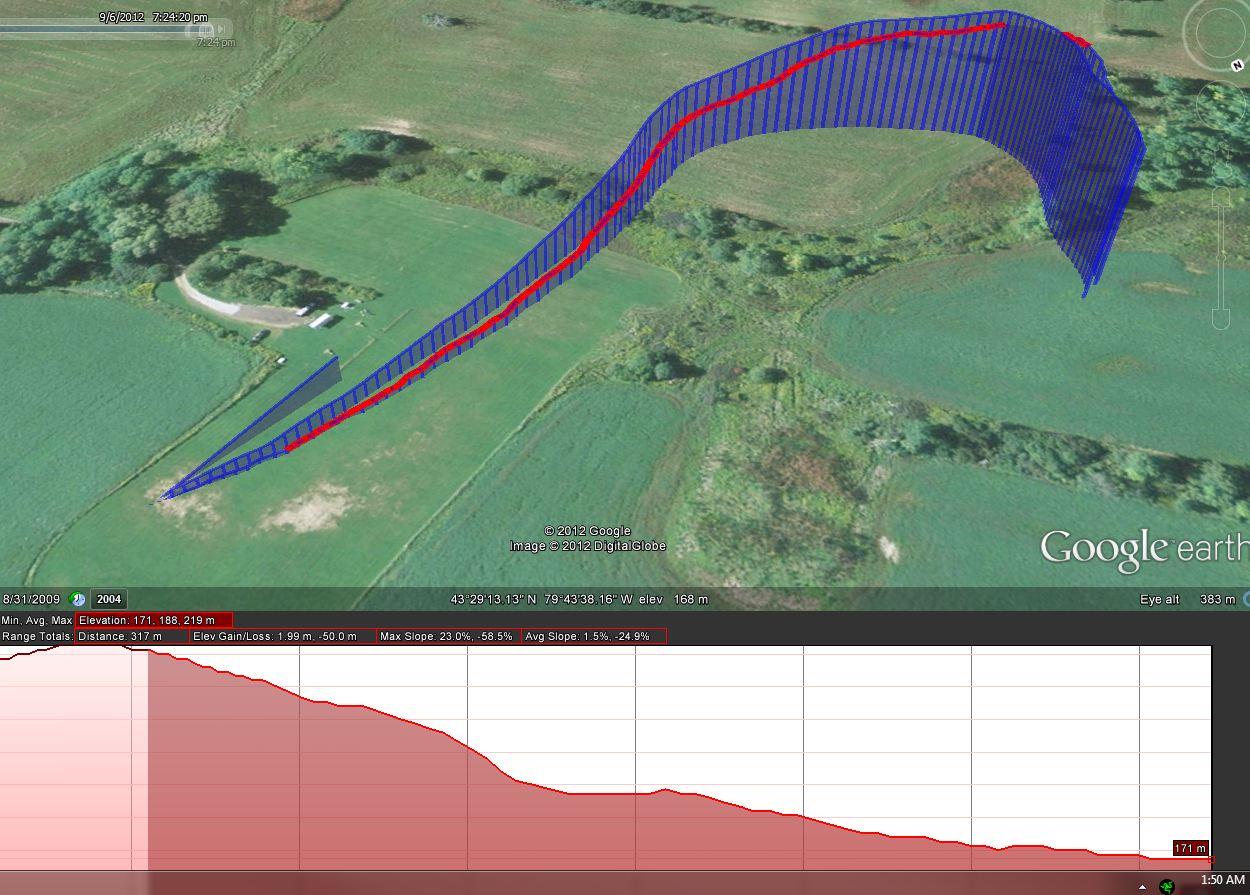
Here is a bad snippet of my Interrupt Logo code for "Go Around" when sonar detects the ground ....
#define LANDING_ALT_DIFF 20
FLAG_OFF(F_LAND) // Switch the motor back on.
END
END
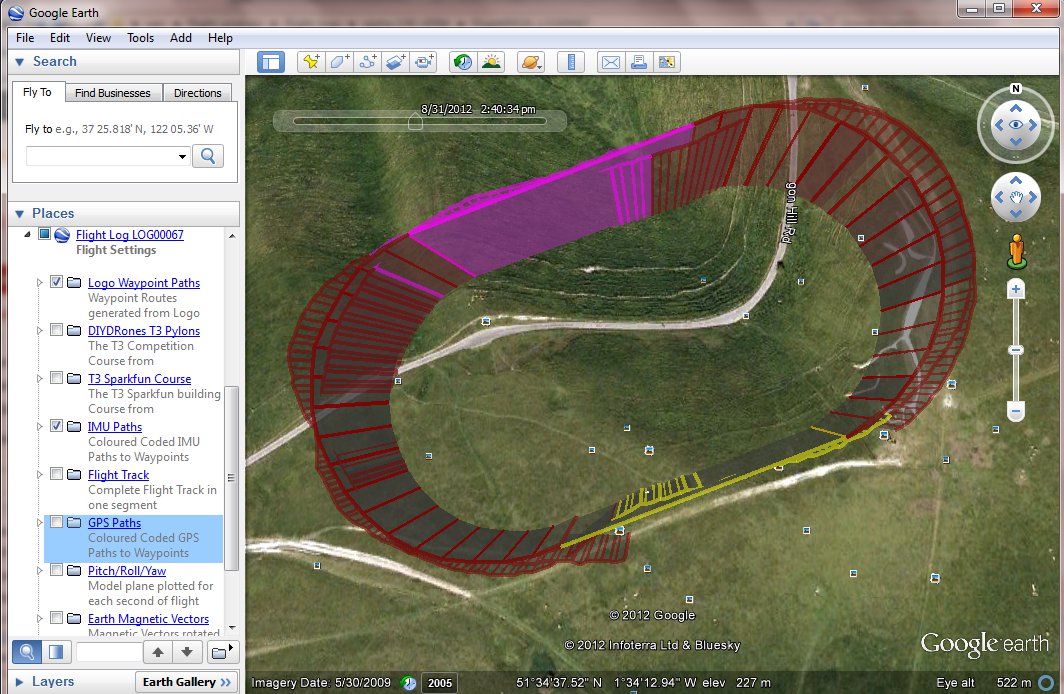
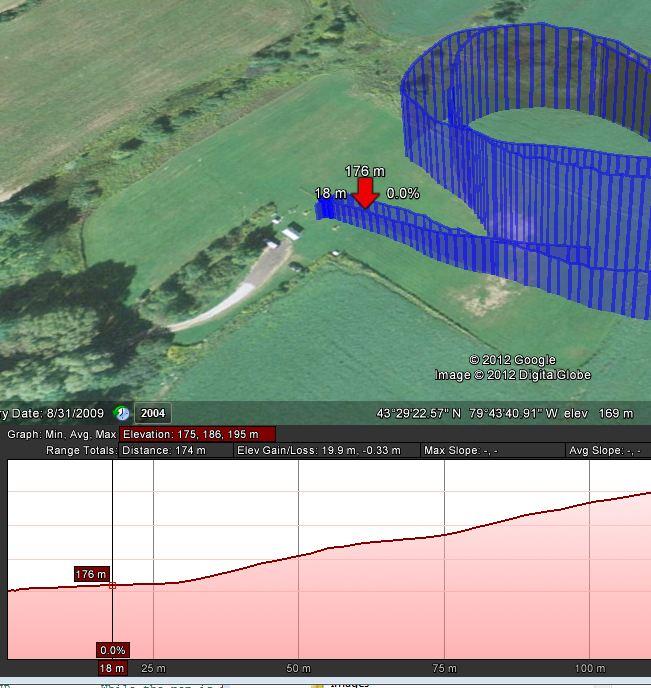
And if you look at the enclose Jpeg picture of the Logo flight plan in Google Earth, you will see what happened.
The Spike going up 940 meters into the sky is the result when the Sonar saw the ground. Nice to see the Sonar working,
but the Logo is not what I wanted.
The reason for the fault was my understanding of Logo Interrupts. Once the condition for an interrupt is "True", then the interrupt routine will execute on every "frame" of MatrixPilot. i.e. The Interrupt will execute at 40Hz. In my case, that will mean the phrase:-
ALT_UP(LANDING_ALT_DIFF - 1)
will execute 40 times / second. Or if you like 10 times for each telemetry line. or ALT_UP(19) * 10 for each telemetry reading. i.e. going up at 190m every 1/4 of a second.
So the moral of this story is, Logo Interrupts execute continually at 40Hz when the evalutation of their conditional is True.
So usually you will not use Relative Waypoitns or Altitude in an Interrtupt.
In my case Relative altitude is definitely what I wanted (see the full Logo below). Should I clear the Interrupt routine in the Interrupt routine to get the correct behaviour ? e.g.
#define LANDING_ALT_DIFF 20
FLAG_OFF(F_LAND) // Switch the motor back on.
CLEAR_INTERRUPT
END
END
Best wishes, Pete
Full Logo from that flight shown for reference below:-
#define GO_AROUND 2
#define LANDING_ALT_DIFF 20
const struct logoInstructionDef instructions[] = {
FD(STRAIGHT_LENGTH)
REPEAT_FOREVER // Embark on a an oval shape. Forward 100m
DO(RIGHT_180) // Turn around by 180 degrees of a circle
DO(RIGHT_180) // Do another graceful 180 degrees of a circle to finish Oval.
FLAG_ON(F_LAND) // Engine Off, and don't ever go up
SET_INTERRUPT(GO_AROUND) // Standby with the interrupt routine, to go around when ground detected
FD(STRAIGHT_LENGTH) // Aim for that point 100 meters away.
CLEAR_INTERRUPT // If you get to that point repeat this plan.
FLAG_OFF(F_LAND) // Re-enable the motor, and allow upward flight
SET_ALT_PARAM // Set our desired Altitude back to the height at which we entered autonomous mode originally.
END
END
TO (RIGHT_180) // A subroutine for executing a nice 180 degree turn around a circle
REPEAT(18) // Do this 18 times (turning 10 degrees for 180 degrees)
RT(10) // Right Turn 10 m
END
END
TO (GO_AROUND) // Interrupt routine for Going Around
FLAG_OFF(F_LAND) // Switch the motor back on.
END
END
} ;
ben levitt
That's a great point. Thanks for bringing it up. In this case, I
think just clearing the interrupt after the ALT_SONAR<400 case is
triggered is good enough. Another way I like to handle this kind of
scenario is with a state machine of interrupts that include some
hysteresis/debouncing. Something like this:
Ben
#define CIRCLE_DOWN 1
#define LAND 2
#define TRY_LANDING 3
#define TRY_CIRCLING 4
const struct logoInstructionDef instructions[] = {
SET_INTERRUPT(TRY_LANDING)
FLAG_OFF(F_LAND) // Engine On
REPEAT_FOREVER
FD(10) // Go forward 10 m
END
END
TO(LAND)
SET_INTERRUPT(TRY_CIRCLING)
200m, gliding from just 2m up
EXEC(CIRCLE_DOWN) // Shouldn't get here. If we do,
switch back to circling
END
// Interrupt routine to use during circling
// If we get low enough, try to land
TO (TRY_LANDING)
IF_LT( ALT_SONAR, 200)
EXEC(LAND)
END
END
// Interrupt routine to use during landing
// If we get too high, stop trying to land, and return to circling
// (Not sure why this would happen, but just illustrating the point.)
TO (TRY_CIRCLING)
IF_GT( ALT_SONAR, 400) // Note the hysteresis, as compared to the
<200 in TRY_LANDING
EXEC(CIRCLE_DOWN)
END
END
DB
DB
DB
////////////////////////////////////////////////////////////////////////////////
// Main Flight Plan
// ////// FUNCTIONS //////
#define RP_SWITCH 1
~~~~
#define CM_SET_ALT 10
#define CM_CW_AUTOTAKEOFF 11
~~~
#define CM_CW_RECTANGLE 14
#define CM_SET_SPEED 15
#define CM_RTSR_90 16
~~~
#define CM_AUTOLAND 19
#define CM_LAND_SONAR 20
// ////// PARAMETERS //////
#define PM_SHORT_RTGLLEG 120 // m
#define PM_LONG_RTGLLEG 140 // m
#define PM_TKOFF_SNRALT 300 // cm, takeoff sonar low alt. threshold
#define PM_TKOFF_GPSALT 3 // m, takeoff GPS low alt. threshold
#define PM_SRNDTURN_FD 10 // m
// LANDING
#define PM_LANDG_SPAN 200 // m, landing, approach to sonar managed soft touch-down
#define PM_LANDG_APRCH_GPSALT 4 // m, start of landing field LT/min. alt. threshold
#define PM_LANDG_APRCH_SNRALT 320 // cm, start of landing field sonar LT/min. alt. threshold
#define PM_LANDG_FSTSEG_SNRALT 280 // cm, FIRST SEGMENT landing sonar alt. threshold
#define PM_LANDG_SECSEG_SNRALT 180 // cm, SECOND SEGMENT landing sonar alt. threshold
#define PM_LANDG_TRDSEG_SNRALT 80 // cm, THIRD SEGMENT landing sonar alt. threshold
#define PM_LANDG_FSTSEG_GPSALT 3 // m, FIRST SEGMENT landing sonar alt. threshold
#define PM_LANDG_SECSEG_GPSALT 2 // m, SECOND SEGMENT landing sonar alt. threshold
#define PM_LANDG_TRDSEG_GPSALT 1 // m, THIRD SEGMENT landing sonar alt. threshold
#define PM_LANDG_APCHSEG_FD 2 // m, END OF LANDING APPROACH FD FLARE distance
#define PM_LANDG_FSTSEG_FD 3 // m, FIRST SEGMENT landing FD FLARE distance
#define PM_LANDG_SECSEG_FD 2 // m, SECOND SEGMENT landing FD FLARE distance
#define PM_LANDG_TRDSEG_FD 1 // m, THIRD SEGMENT landing FD FLARE distance
// SPEED control 9 32.4kph, 10 36kph, 11 39.6kph, 12 43.2kph, 13 46.8kph
#define PM_SPEED_LOWTRH 9 // m/sec, speed LT/min. alt. threshold
#define PM_SPEED_HIGHTRH 11 // m/sec, speed LT/min. alt. threshold
#define PM_TXTOGGLE_LOWTRH 2800 // TX 3pos-switch control LT/low threshold
#define PM_TXTOGGLE_MIDTRH 3400 // TX 3pos-switch control LT/mid-GT/high threshold
#define PM_TXKNOB_FSTQTL 2800 // TX knob/slider control LT/1st quartile threshold
#define PM_TXKNOB_SECQTL 3100 // TX knob/slider control LT/2nd quartile threshold
#define PM_TXKNOB_TRDQTL 3450 // TX knob/slider control LT/3rd-GT/4th quartile threshold
#define PM_DISTTO_HOME 160 // m min distance threshold to trigger auto RTH and land
#define PM_LANDRTGL_REPEATS 2 // number of semi-rounded rectangles before landing
SET_INTERRUPT(CM_SET_ALT) // SET ALT PER THROTTLE POSITION
~~~~
IF_LT(LOGO_B_CHANNEL,PM_TXKNOB_TRDQTL) //PARAM do wider circles PARAM , AUTOLAND
IF_GE(ALT_SONAR, 0)
IF_LT(ALT_SONAR,PM_TKOFF_SNRALT) // if less than 300cm do autotakeoff
DO_ARG(CM_CW_AUTOTAKEOFF,PM_LONG_RTGLLEG)
END
ELSE
IF_LT(ALT,PM_TKOFF_GPSALT) // if less than 3m do autotakeoff
DO_ARG(CM_CW_AUTOTAKEOFF,PM_LONG_RTGLLEG)
END
END
REPEAT(PM_LANDRTGL_REPEATS)
DO(CM_SET_SPEED)
DO_ARG(CM_CW_RECTANGLE,PM_LONG_RTGLLEG)
END
CLEAR_INTERRUPT
DO_ARG(CM_AUTOLAND,PM_LANDG_SPAN)
ELSE //_GT PARAM last quartile do TIGHT CIRCLES FOREVER
REPEAT_FOREVER
DO(CM_SET_SPEED)
DO_ARG(CM_CW_RECTANGLE,PM_SHORT_RTGLLEG)
END
CLEAR_INTERRUPT
END
~~~
TO (CM_CW_AUTOTAKEOFF) // Clockwise autonomous takeoff
IF_GT(LOGO_C_CHANNEL,PM_TXTOGGLE_MIDTRH)
FLAG_ON(F_TAKEOFF) // Agressive takeoff at higher speed
END
PEN_UP
USE_CURRENT_ANGLE // needs to be tested for RP orientation
USE_CURRENT_POS
PARAM_DIV(4)
BK_PARAM // use parm to move back from target position
PARAM_SUB(7)
SET_ALT_PARAM // at 110 param, ALT 20.5 m
PARAM_ADD(7)
PARAM_MUL(4)
FD_PARAM // FD 110
PEN_DOWN
DO(CM_SET_SPEED)
DO_ARG(CM_RTSR_90,PM_SRNDTURN_FD)
PARAM_DIV(4)
PARAM_SUB(2)
SET_ALT_PARAM // at 110 param, ALT 25.5 m
PARAM_ADD(2)
PARAM_MUL(4)
PARAM_DIV(3)
PARAM_ADD(5)
FD_PARAM // at 110 param, FD 41.66 m
DO_ARG(CM_RTSR_90,PM_SRNDTURN_FD)
PARAM_ADD(5)
SET_ALT_PARAM // at 110 param, ALT 46.66
PARAM_SUB(10)
PARAM_MUL(3)
FD_PARAM // FD 110
DO_ARG(CM_RTSR_90,PM_SRNDTURN_FD)
PARAM_DIV(2)
PARAM_SUB(4)
SET_ALT_PARAM // at 110 param, ALT 51
PARAM_ADD(4)
PARAM_MUL(2)
PARAM_DIV(3)
PARAM_ADD(5)
FD_PARAM // at 110 param, FD 41.66 m
DO_ARG(CM_RTSR_90,PM_SRNDTURN_FD)
PARAM_SUB(5)
PARAM_MUL(3)
IF_GT(LOGO_C_CHANNEL,PM_TXTOGGLE_MIDTRH)
FLAG_OFF(F_TAKEOFF)
END
END
~~~
// CLOCKWISE RECTANGLE ( matches CM_CW_AUTOTAKEOFF dimensions):
TO (CM_CW_RECTANGLE)
SET_INTERRUPT(CM_SET_ALT) // SET ALT PER THROTTLE POSITION
REPEAT(2)
FD_PARAM
DO_ARG(CM_RTSR_90,PM_SRNDTURN_FD)
PARAM_DIV(3)
PARAM_ADD(5)
FD_PARAM
DO_ARG(CM_RTSR_90,PM_SRNDTURN_FD)
PARAM_SUB(5)
PARAM_MUL(3)
END
CLEAR_INTERRUPT
END
~~~
TO(CM_SET_SPEED)
IF_LT(LOGO_C_CHANNEL,PM_TXTOGGLE_MIDTRH)
SET_SPEED(PM_SPEED_LOWTRH) // Light payload and wingloading cruising speed
ELSE //_GT PARAM
SET_SPEED(PM_SPEED_HIGHTRH) // Added payload and wingloading speed
END
END
~~~
TO(CM_SET_ALT) // Altitude control
LOAD_TO_PARAM(THROTTLE_INPUT_CHANNEL)
PARAM_SUB(2250) // Baseline throttle input: c. 1/4 throttle, 90m mid optimized for DX8
PARAM_DIV(4) // Scale: 5 eq. to 340m 1,115.49ft; 4 to 425m 1394.36ft; 3 to 566.66m 1859.12ft
IF_LT_PARAM(50) // Min. altitude 50 m
SET_ALT(50)
ELSE
SET_ALT_PARAM // Proportional to channel pos.
END
END
~~~
// ////// AUTONOMOUS SOFT LANDING PROGRAM ///////
TO (CM_AUTOLAND) // Landing final approach
FLAG_ON(F_LAND) // Start powerless landing glide
PEN_UP // CONTINUUM OF LAST LEG, ENFORCES SAME ORIENTATION OF AUTO-TAKEOFF
USE_CURRENT_POS // aim for the current flightplan
USE_ANGLE_TO_GOAL // aim for the current flightplan angle target,
BK_PARAM // use parm to move back from target position as routine's landing span
PARAM_DIV(10)
SET_ALT_PARAM // At 200 param, this is eq. to 20 m alt
PARAM_MUL(2)
FD_PARAM // At 200 param, this is eq. to 40 m
PARAM_DIV(4)
PARAM_ADD(2)
SET_ALT_PARAM // At 200 param, this is eq. to 12 m alt
PARAM_MUL(3)
PARAM_ADD(4)
FD_PARAM // At 200 param, this is eq. to 40 m
PARAM_DIV(10)
IF_GE(ALT_SONAR, 0) // Chk for a sonar attached, if none, value would be -1
IF_LT(ALT_SONAR,PM_LANDG_APRCH_SNRALT)
FLAG_OFF(F_LAND) // throttle up for some flar,
SET_ALT(PM_LANDG_APRCH_GPSALT)
FD(PM_LANDG_APCHSEG_FD)
FLAG_ON(F_LAND) // Throttle off
ELSE
SET_ALT(PM_LANDG_APRCH_GPSALT)
END
ELSE
IF_LT(ALT,PM_LANDG_APRCH_GPSALT) // Use ALT if no sonar cross your fingers
FLAG_OFF(F_LAND)
SET_ALT(PM_LANDG_APRCH_GPSALT)
FD(PM_LANDG_APCHSEG_FD)
FLAG_ON(F_LAND) // Throttle off and continue powerless glide
END
END
PARAM_MUL(10)
FD_PARAM // At 200 param, this is eq. to 40 m
PEN_DOWN
DO_PARAM(CM_LAND_SONAR)
END
TO (CM_LAND_SONAR) // Manage soft landing
PARAM_ADD(14) // about 75 meters landing stretch from goal
PEN_UP // ESTABLISH CONTINUUM WITH ABOVE
USE_CURRENT_POS // aim for the current flightplan x,y position target
USE_ANGLE_TO_GOAL // aim for the current flightplan angle target,
BK_PARAM // start exec. of script 80 meters from goal
PARAM_DIV(3) // Define three landing segments
IF_GE(ALT_SONAR, 0) // FST (first) landing segment
IF_LT(ALT_SONAR,PM_LANDG_FSTSEG_SNRALT)
FLAG_OFF(F_LAND) // throttle up, flare and
SET_ALT(PM_LANDG_FSTSEG_GPSALT) // moderately level the descend slope
FD(PM_LANDG_FSTSEG_FD) // flare dist PARAM
FLAG_ON(F_LAND) // Throttle off and continue powerless glide
ELSE
SET_ALT(PM_LANDG_FSTSEG_GPSALT)
END
ELSE
SET_ALT(PM_LANDG_FSTSEG_GPSALT)
END
FD_PARAM
PEN_DOWN
IF_GE(ALT_SONAR, 0) // SEC (second) landing segment
IF_LT(ALT_SONAR,PM_LANDG_SECSEG_SNRALT)
FLAG_OFF(F_LAND)
SET_ALT(PM_LANDG_SECSEG_GPSALT)
FD(PM_LANDG_SECSEG_FD) // flare dist PARAM
FLAG_ON(F_LAND)
ELSE
SET_ALT(PM_LANDG_SECSEG_GPSALT)
END
ELSE
SET_ALT(PM_LANDG_SECSEG_GPSALT)
END // If conditions not true, maintain the landing trajectory
FD_PARAM
IF_GE(ALT_SONAR, 0) // TRD (third) landing segment
IF_LT(ALT_SONAR,PM_LANDG_TRDSEG_SNRALT)
FLAG_OFF(F_LAND)
SET_ALT(PM_LANDG_TRDSEG_GPSALT)
FD(PM_LANDG_TRDSEG_FD) // flare dist PARAM
FLAG_ON(F_LAND)
ELSE
SET_ALT(PM_LANDG_TRDSEG_GPSALT)
END
ELSE
SET_ALT(PM_LANDG_TRDSEG_GPSALT)
END
FD_PARAM
END
On Saturday, September 1, 2012 12:17:06 PM UTC-4, Pete wrote:
DB
AIRFRAME_TYPE AIRFRAME_VTAIL~~~WIND_GAIN_ADJUSTMENT 0~~~ALTITUDEHOLD_STABILIZED AH_PITCH_ONLYALTITUDEHOLD_WAYPOINT AH_FULL~~~#define ROLLKP 0.25#define ROLLKD 0.08#define YAWKP_AILERON 0.08#define YAWKD_AILERON 0.03#define AILERON_BOOST 1.00~~~#define PITCHGAIN 0.12#define PITCHKD 0.07#define RUDDER_ELEV_MIX 0.05 // reduced for breeze's vtail configuration#define ROLL_ELEV_MIX 0.05#define ELEVATOR_BOOST 0.50~~~#define YAWKP_RUDDER 0.08#define YAWKD_RUDDER 0.12 // 0.12#define ROLLKP_RUDDER 0.06#define ROLLKD_RUDDER 0.05#define MANUAL_AILERON_RUDDER_MIX 0.03#define RUDDER_BOOST 1.00(I'm wondering if any of these is fighting navigation and might be causing the drift?)
TO(CM_LTSR_90) // Right turn 90 degrees, semi round
REPEAT(9)
FD_PARAM // uses PM_SRNDTURN_FD defined param eq. to 10
LT(10)
END
END
TO(CM_RTSR_90) // Right turn 90 degrees, semi round
REPEAT(9)
FD_PARAM
RT(10)
END
END
William Premerlani
Peter Hollands
With regard to preventing "drift" during your landings ....
I think there are two areas to work on:-
- Improving the control gains of your aircraft
- Trying to get "Cross Tracking" working well for you.
Improving Control Gains:-
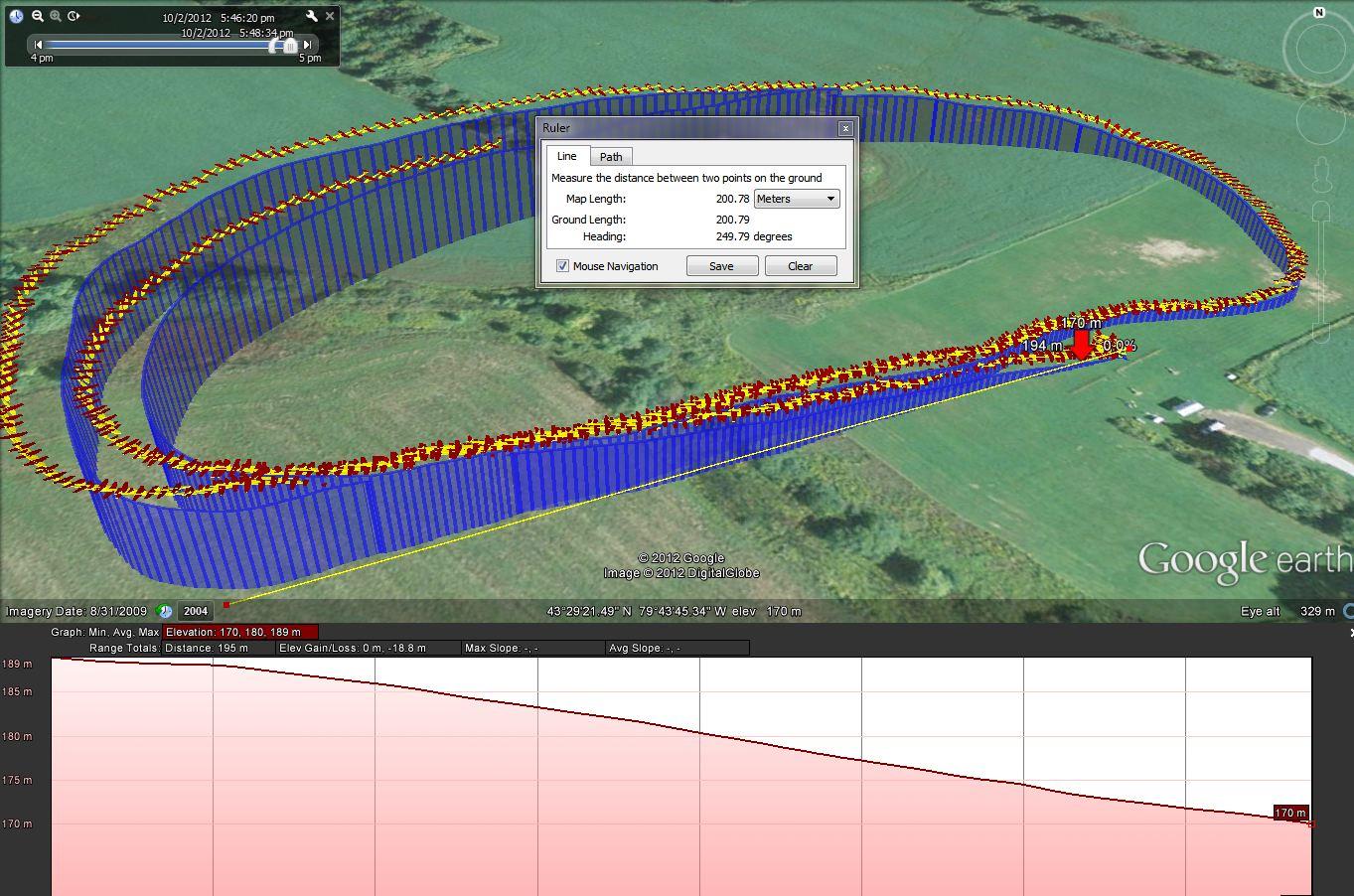
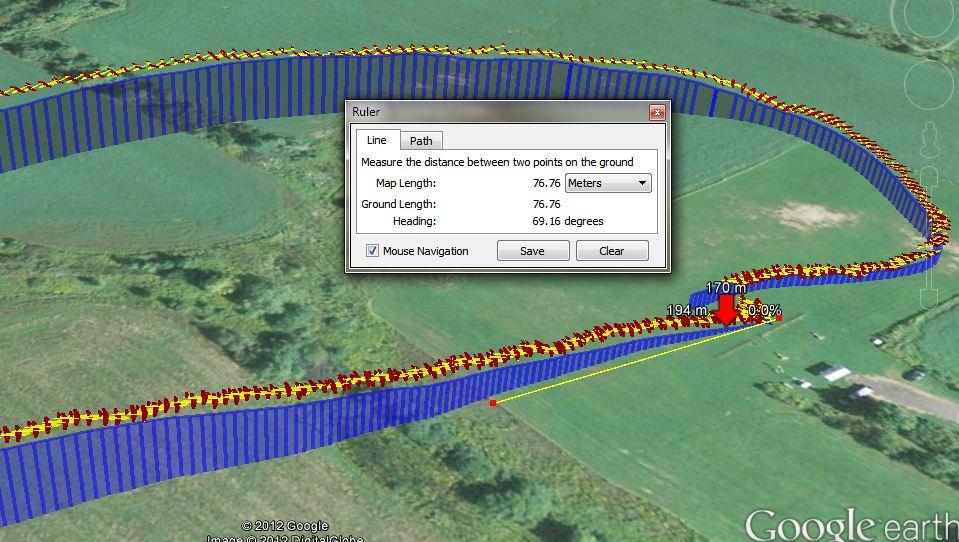
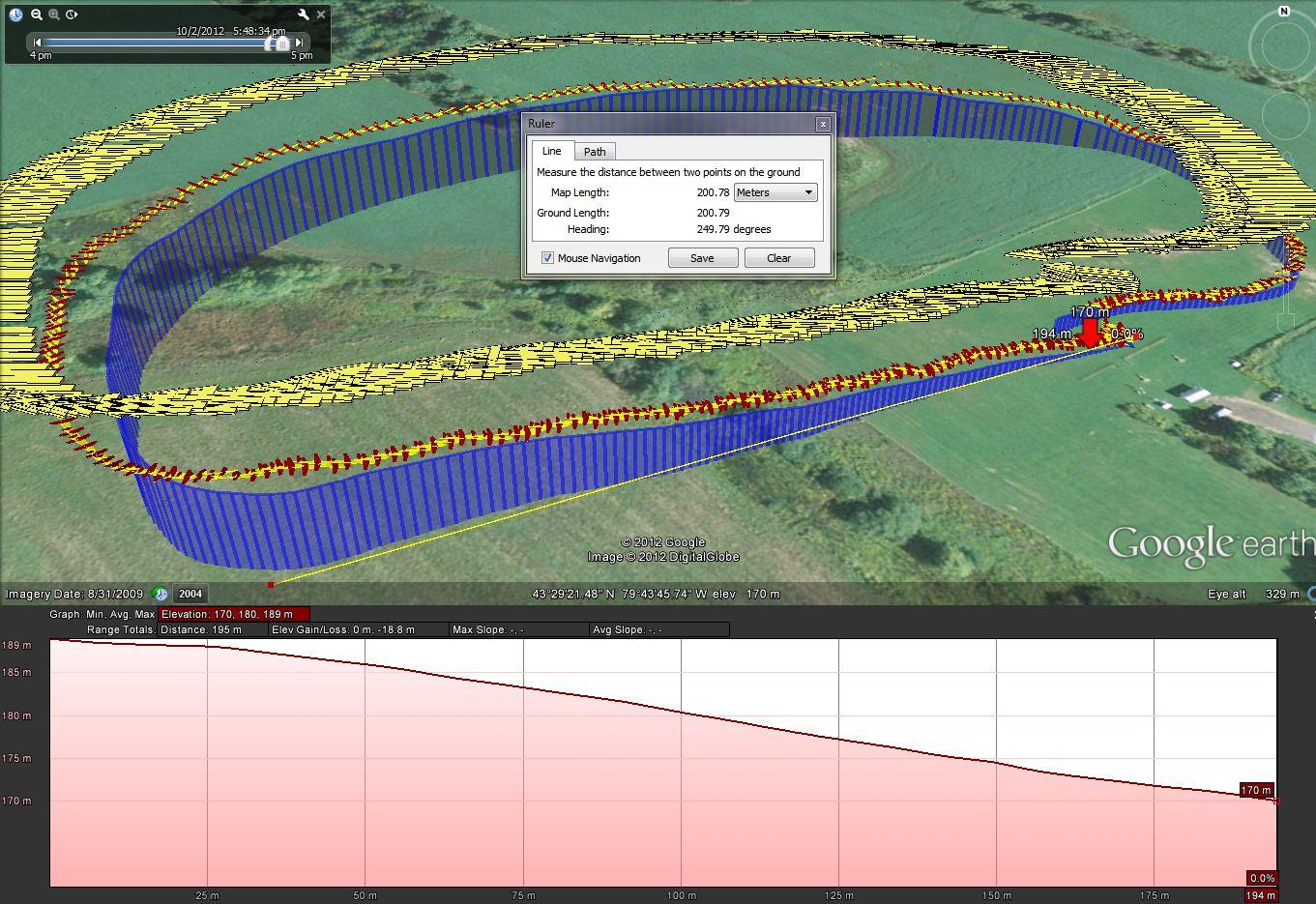
I notice from your Google Earth flights, with Logo waypoints shown alongside the flight track, that your plane is not really following the Logo path well. It is understeering all the time, by significant amounts. Here are some throughts about that ...
When tuning MatrixPilot control gains, it is vital to remember that there can be up to 3 Pilots flying the plane at the same time. Here is how the 3 Pilot dynamics work ...
In Manual:- Just you, the real human pilot is in charge of the plane.
In Stabilized (AH_NONE is true [Alittude Hold is off] :- The stabilization pilot tries to keep the plane level in pitch and roll. The manual pilot can also "mix in their controls". If the manual pilot turns right, the stabilization pilot tries to level the plane. But the mixing in the ailerons or elevator leaves a residual error, which means the plane settles in a bank or ascent/descent pitch.
Stabilization works against the manual pilot. Lot's of high gains for stabilization will make the plane difficult to turn. Low gains for stabilization are best. So the plane is still easy for the manual pilot to fly, but so the plane remains stable at all normal flight speeds. Lot's of new users turn the stabilisation gains upt to high. The plane should be easy to turn with stabilisation on.
In Autonomous Mode: There are three pilots. Autonomous Navigation Pilot, that tries to turn the plane against the wishes of the Stabilisation Pilot. And potentially the Manual Pilot can also "mix in commands" alongside those of the Autonomous Navigation Pilot. If the plane is easy to turn for the manual pilot in stabilized mode, then the plane will also be easy to turn for the Autonomouse Navigation Pilot (against the Stabilization Pilot) in Autonomouse Mode. Make sure the plane is not over-stabilized, otherwise the the Navigation Pilot will have a hard job turning the plane.
So the key to creating nice autonomous turns in MatrixPilot is to: a) Keep stabilisation gains reasonably low - test that in Stabilized mode using manual flight b) once stabilisation gains are correct, then adjust the navigation gains upwards make the plane turn more forcibly onto new navigation routes and directions when in Autonomous mode.
So which are the stabilisation gains, and which are the navigation gains ? The main navigation gain on my plane is YAWKP (I'm flying with ailerons.)
(A note in passing. Many classical RC planes are naturally stable by design. By careful about using "KD" gains where they are not really needed. I set quite a few of my KD turns to zero for my Alpha Axion (similar to an easystar) and for my Twinstar 2.)
Tuning up Control Gains used to be a laborious technique .... until MAVLink was implemented. I think that few people have used that yet, so it is still rather experimental, and best tested on cheaper / more disposable air frames.
With an Xbee connected to your plane, you can change the main gains of the plane, while it is in flight. It requires two people. One flying, the other using a PC with QgroundControl running, to change the gains in flight. The knowledeable pilot flies, and keeps their eyes on the plane,and verbally requests Gain changes. The second person makes the changes on the PC, transmits them to the plane, and confirms verbally the change. In one flight, you can tune up a plane perfectly. I first did this with Riccardo Kuebler in Switzerland last January (Thanks Ric !).
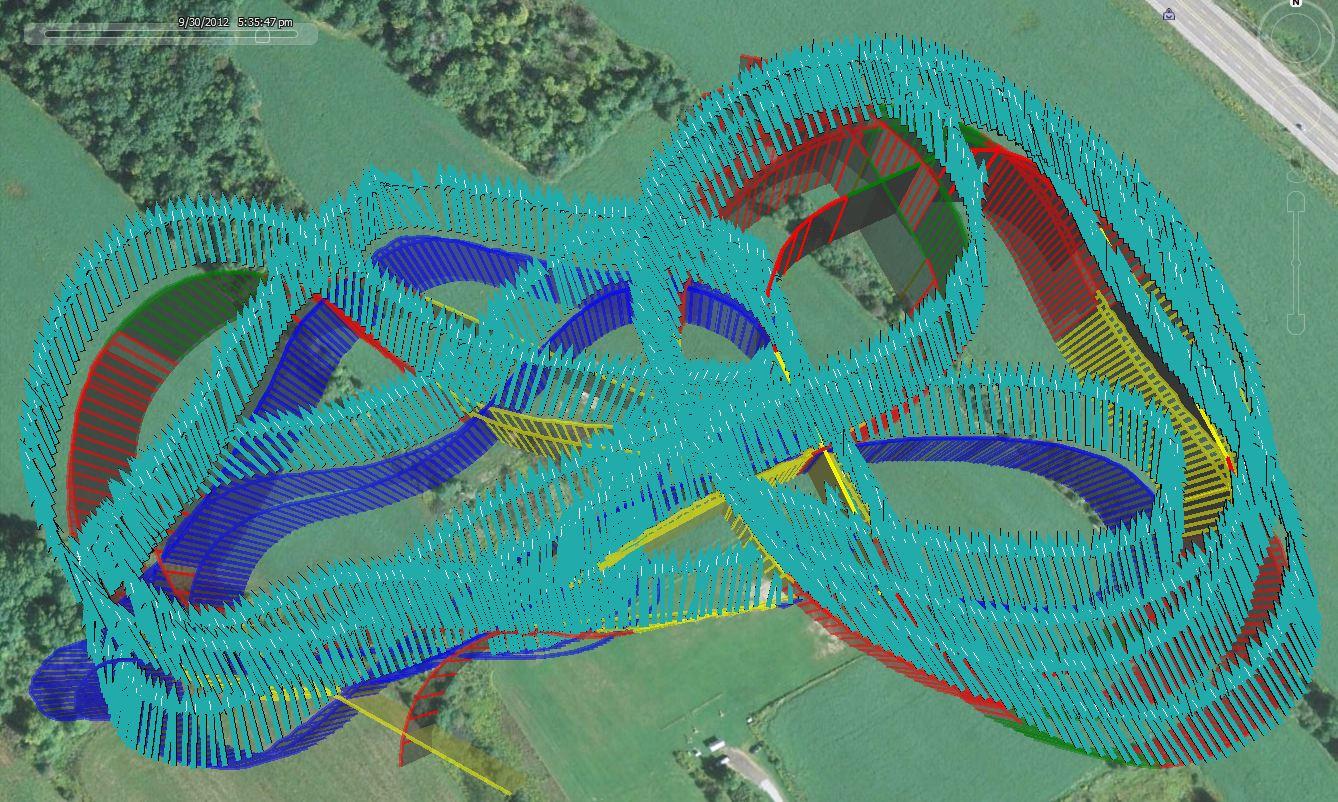
I enclose a comparison screenshot of my plane following an Oval Logo pattern where the straights of the oval are 100m, to show how I would hopet your plane could follow the Logo paths.
Improving Cross Tracking:-
I'm not sure if you are using the Cross Track Flag yet at all ? People have had mixed results over the years with cross tracking. But potentially, for landing on a runway, we should be using cross-tracking enabled navigation. This is specifically meant to stop the plane from drifiting to one side. I do not have much experience of either the code, algorithms, or usage of cross tracking, so I will leave it for others to comment on this area.
Best wishes, Pete
DB
~~~~
IF_LT(ALT_SONAR,PM_LANDG_APRCH_SNRALT)FLAG_OFF(F_LAND) // throttle up for some flar,
SET_ALT(PM_LANDG_APRCH_GPSALT)
FD(PM_LANDG_APCHSEG_FD)
FLAG_ON(F_LAND) // Throttle off
ELSE
SET_ALT(PM_LANDG_APRCH_GPSALT)
END
IF_LT(ALT_SONAR,PM_LANDG_APRCH_SNRALT)IF_GE(WIND_SPEED_Z, PM_HEAD_WINDTRH) // HEAD WIND (?) THRESHOLD TO TURN ON THROTTLEFLAG_OFF(F_LAND)// Throttle ON
END
SET_ALT(PM_LANDG_APRCH_GPSALT)
FD(PM_LANDG_APCHSEG_FD)
IF_GE(WIND_SPEED_Z, PM_HEAD_WINDTRH)FLAG_ONF_LAND) // Throttle off
ENDELSE
SET_ALT(PM_LANDG_APRCH_GPSALT)
END
DB
DB
Peter Hollands
My hypothesis that I'm testing for our current sonar device MB1230 from maxbotix:-
If the Plane is Higher than 4.00 meters and flying at approx no more than 10m / s over short straw on a dry day in reasonably temperatures of between 5-20 degeres C:-
Sonar will reliably indicate when the plane flys down through the 4 meter contour above ground altitude.
Sonar will provide no information at all about heights above 4.00 meters
Once the sonar is below 4:00 meters
Sonar may still intermittmentally go "Out of Range", even though it should be well within range.
So at the moment, one could nor terrain follow using the primary sonar information. It will need some type of filtering.
On landing, Sonar will nearly always go "out of range" for a short period (1/10 of a second) on my field. I do not yet know why.
So in summary, at the moment, I have only one reliable piece of information from sonar to use. "We were high, and on descent, Sonar just detected the ground. It is really there."
I look forward to analyzing your raw logs, and graphing your raw sonar and ALT_SONAR when I have time in the near future, to see if your own data is better or worse.
Best wishes, Pete
William Premerlani
DB
Peter Hollands
I enclose a link to a very short video shot on Saturday morning when we had a break in the weather here. (South of the UK).
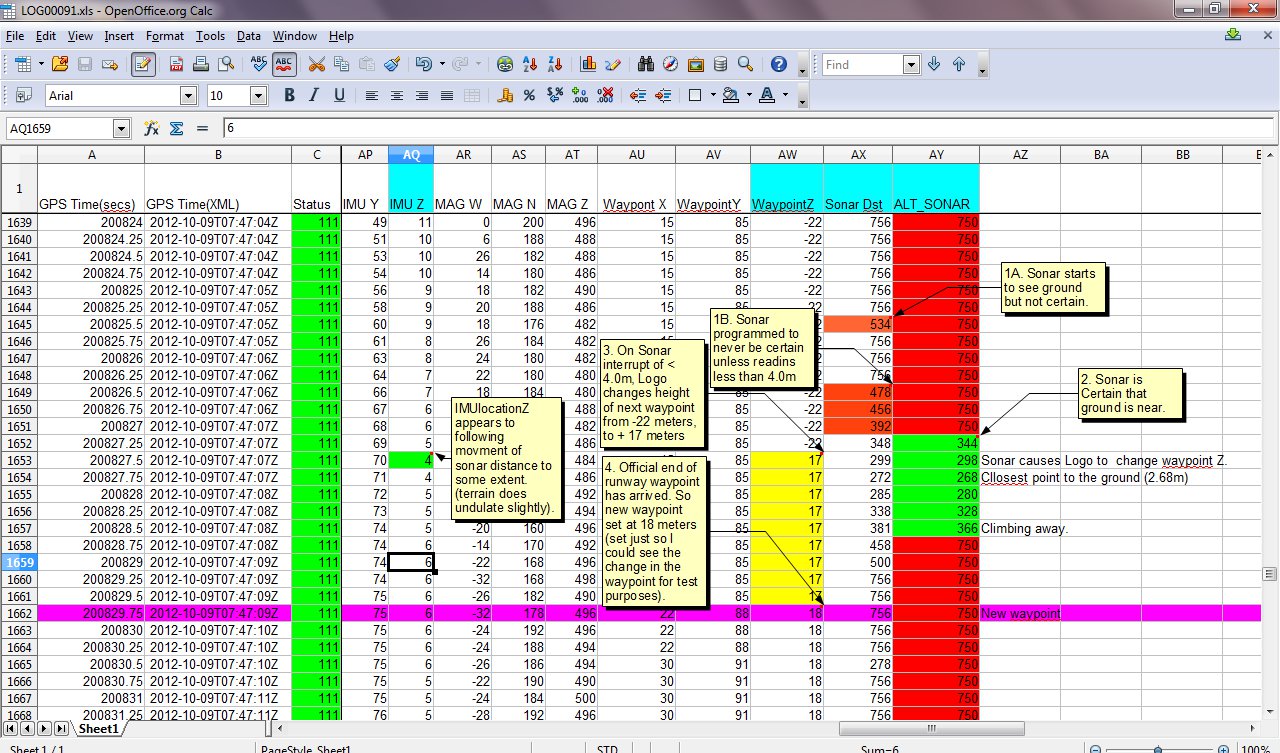
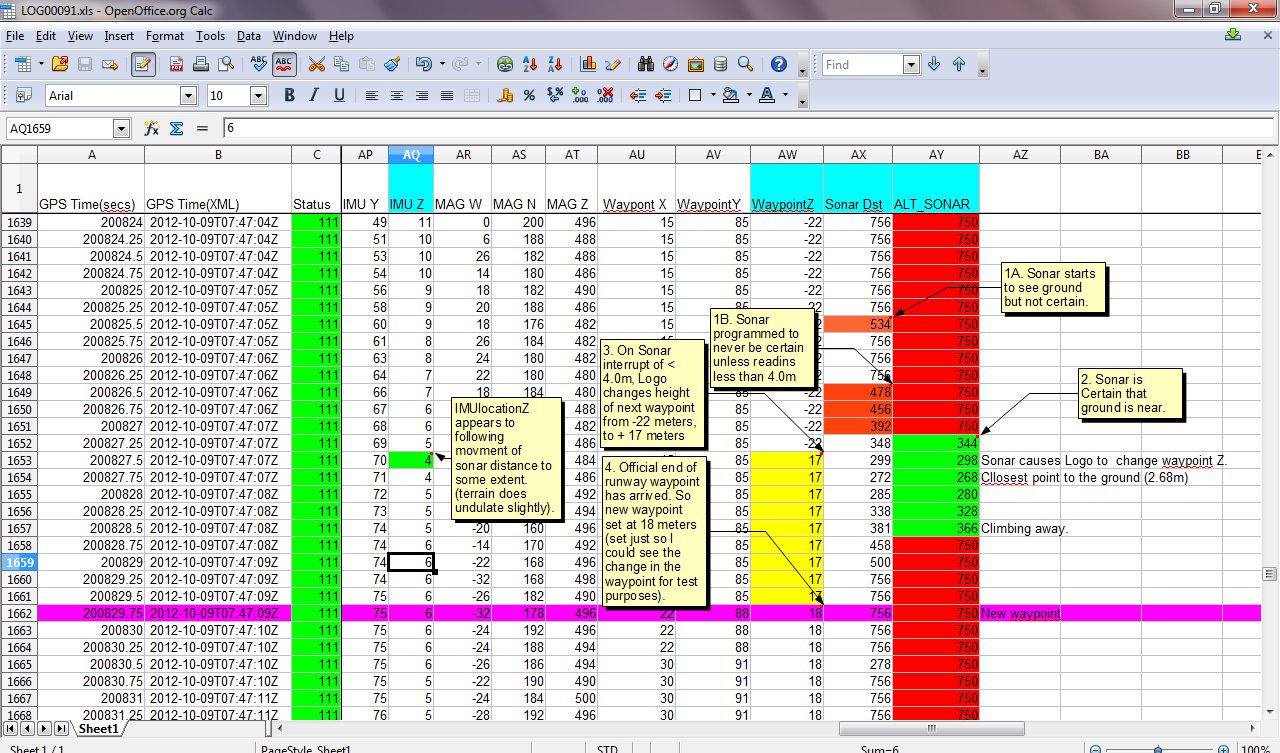
Here is the interpretation of the video which I have analysed carefully using the SERIAL_UDB_EXTRA telemetry.
1. The plane is in Autonomous mode as it approaches on a powered decent to a waypoint X below ground level. (Yes it would normally have ploughed into the ground).
2. The Sonar detects the ground during descent at 4 meters, and immediately tells the plane to climb to 11m while heading for the same waypoint X. (An Interrupt; with Clear Interrupt) In practice it flew about 1 meter above and parallel to the ground. (My plane has poor climb performance).
3. The plane reached it's waypoint X at the end of the runway, and now was supposed to change altitude to 12m (turtle / target altitude moves from 11 to 12 meters up), and then start a graceful 180 degrees. But instead the motor went briefly off, the plane descended at pitch -9 degrees briefly (about 1/2 a second), landed (all with 1/2 a second) and then went to full throttle. But now the plane had landed and was not going to move.
The video looks like a great landing.
In Truth .... The Sonar worked well, but something happened when the waypoint changes, and caused the plane to dip for a moment, instead of climbing up and away, so it landed when it was not meant to.
So Sonar is working for me, but I now need better and more accurate low level flying from Logo / waypoints, so I can fly an automatic "Go Around", for multiple landing circuits.
Investigation and analysis is to be continued .....
Best wishes, Pete
P.S. Be very careful in changing the variable:-
#define SONAR_SAMPLE_THRESHOLD 3 // Number of readings before code deems "certain" of a true reading.
That threshold is there to prevent false "Ground is near" readings, when the plane is more than 4 meters high. In my data set, if the plane is more than 4 meters high, it generally only ever has 1 false ground reading at any one time. So I insist on getting 3 good "ground is near" readings, before accepting that the ground is really near. I can see that the result is a delay of 3/10ths of a second before accepting readings of less than 4 meters as being "True". But as you can see from my video, the plane changes pitch very quickly once the sonar detects "True" ground readings.
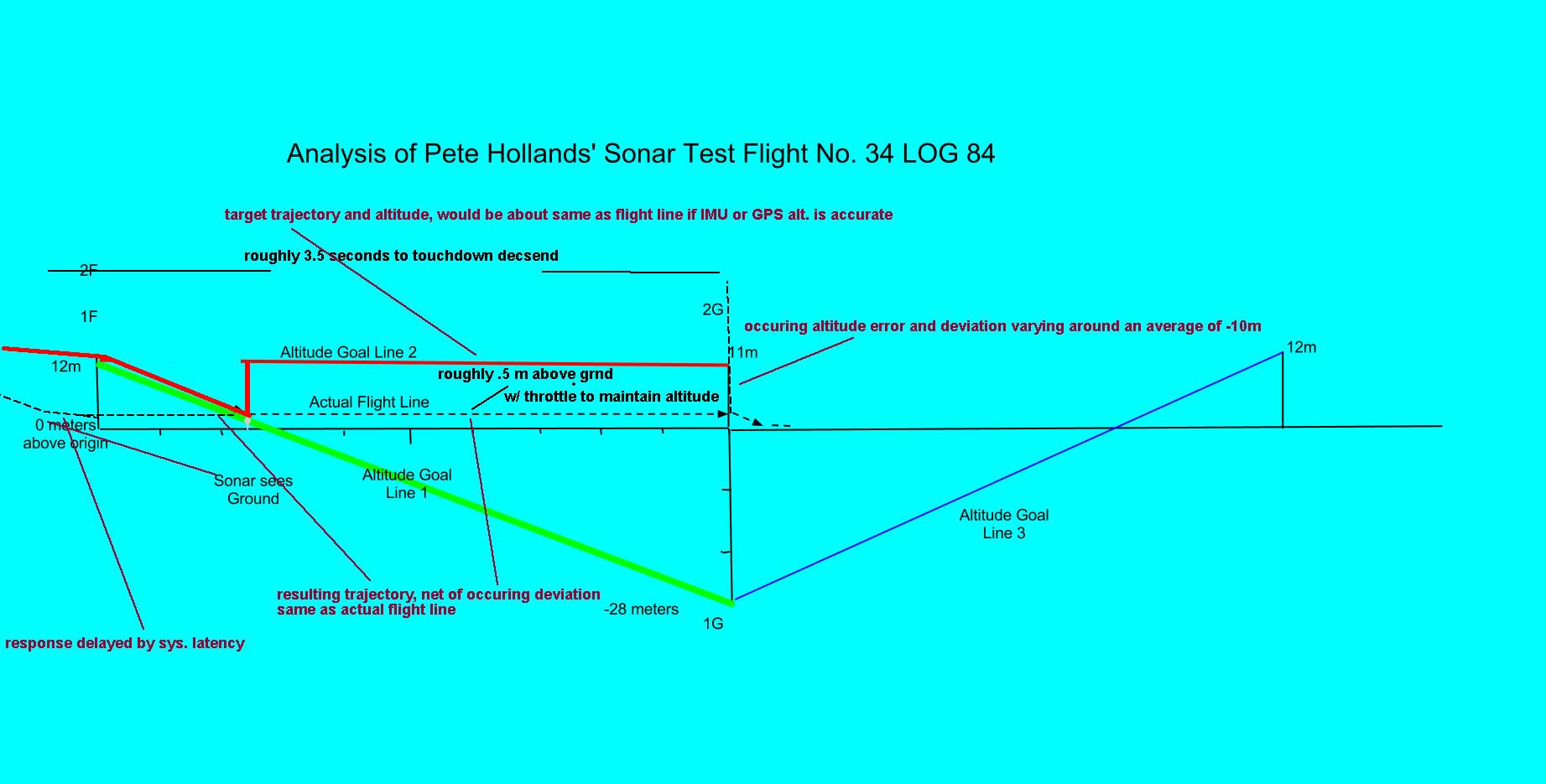
Peter Hollands
Essentially, I forgot that MatrixPilot is usually flying on a "Desired Altitude Goal Line", between the last waypoint, and the next waypoint. And if you change the height, with an interrupt of the Logo Turtle, it is only going to change the next waypoint's height, not the last waypoint's height.
That can get you into trouble, if you don't think about the nuances.
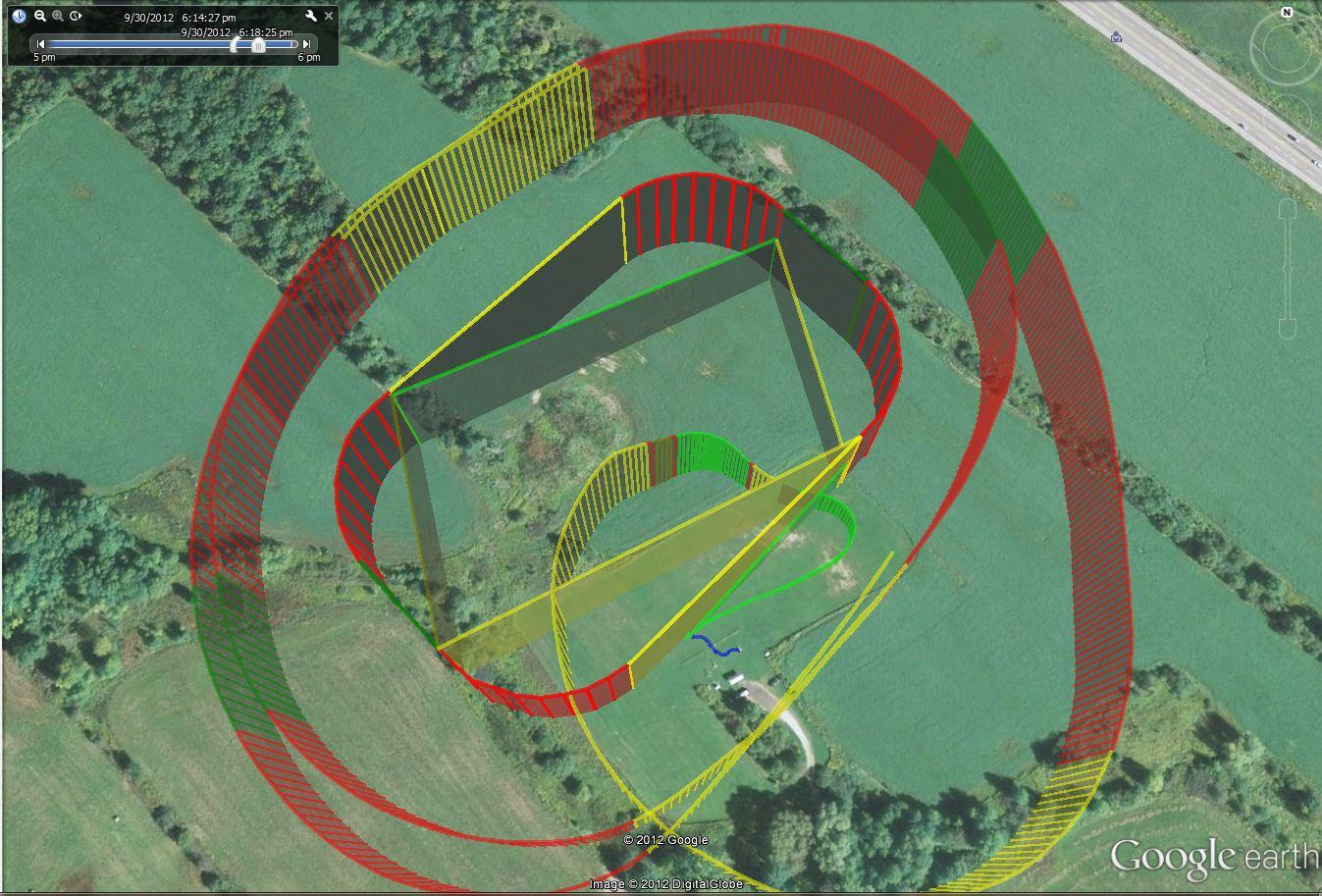
If you have watched the short landing video, take a good look at this diagram of what actually happened.....
During Descent, the initial altitude goal line was altitude goal line no. 1 (Green).
Then the sonar saw the ground, Logo was interrupted and the Turtle was moved from -28m to 11m.
So now the plane should have followed altitude goal line number 2 (red), which is a flat horizontal line.(which it did pretty much).
Then the plane reached the desired waypoint. The next altitude goal line was calculated. BUT .... the original from goal line is still going to be -28m. So the new Altitude goal line no. 3 goes from -28, to 11m. (blue line) So at the beginning of the line, our plane, tries to dive and also cuts throttle to get back onto the altitude goal line, but ends up landing.
The only thing that is not yet explained, is why the throttle started to come on again, after the landing.
I will think some more on that.
And also, I need now to consider the best way to program the Logo for a go around. Possibly I should have use the Take Off flag.
Best wishes, Pete
P.S. Actual Logo shown below:-
#define RIGHT_180 1
#define GO_AROUND 2
#define LANDING_ALT_DIFF 40
const struct logoInstructionDef instructions[] = {
LOAD_TO_PARAM(ALT) // Remember our Altitude from when we went into Autonomouse Mode
FD(STRAIGHT_LENGTH)
REPEAT_FOREVER // Embark on a an oval shape. Forward 100m
DO(RIGHT_180) // Turn around by 180 degrees of a circle
FD(STRAIGHT_LENGTH) // Go back 100m
DO(RIGHT_180) // Do another graceful 180 degrees of a circle to finish Oval.
SET_INTERRUPT(GO_AROUND) // Standby with the interrupt routine, to go around when ground detected
ALT_DOWN(LANDING_ALT_DIFF) // In the mean time set altitude 30m further down (may be underground).
FD(STRAIGHT_LENGTH) // Aim for that point 100 meters away.
CLEAR_INTERRUPT // If you get to that point repeat this plan.
SET_ALT_PARAM // Set our desired Altitude back to the height at which we entered autonomous mode originally.
END
END
TO (RIGHT_180) // A subroutine for executing a nice 180 degree turn around a circle
REPEAT(18) // Do this 18 times (turning 10 degrees for 180 degrees)
FD(8) // Go forward 8 m
RT(10) // Right Turn 10 m
END
END
TO (GO_AROUND) // Interrupt routine for Going Around
IF_LT( ALT_SONAR, 400) // If ground is less than 400 centimeter (4 meters away)
ALT_UP(LANDING_ALT_DIFF - 1) // Set desire altitude to be 29 meters further up.
CLEAR_INTERRUPT
END
END
Peter Hollands
Please take my previous post and diagram as being a Hypothesis, rather than fact, until we have reached agreement between the core developers on the detail of what is happening in the code.
Best wishes, Pete
William Premerlani
DB
Peter Hollands
Thanks for thinking about Speed Control. I had speed control turned off (Apologies for not including options.h).
I now understand why the engine came on after landing. I have tidied up my diagram, and added explanations for every segment of the landing. It all makes sense now. (Please see diagram). (link to video for convenience).
The key point was that the final waypoint in the diagram was only 8 meters further on in Logo, not 100m. (which was how I originally drew the diagram). Logo was executing the 180 degree turn which repeats lots of small steps. So the altitude goal line was from -28 meters to +11 meters over a distance of 8 meters i.e. it was a very steep altitude goal line rising up fast.!
The plane dived for the altitude goal line. Hit the ground (landed), slid a little on the ground, and met the rapidly rising altitude goal line. So it switched on the throttle and tried to climb. But the plane was now firmly stuck.
There is an issue about the Logo Altitude Goal Line as to whether it shoudl have adjusted the goal.fromHeight as well as goal.Height when the Logo Sonar Interrupt moved the Logo Turtle altitude from -28m to +11m. I think Logo should change the previous waypoint height, and I'm gong to try that in my version of Logo.
Ben,
Thanks for confirming by email that we shoudl probably change the Goal.fromHeight as well as Goal.height when the Logo Turtle changes height during an interrupt. I highlight in green below the new line that I propose.
void update_goal_alt( int z )
{
goal.fromHeight = goal.height ;
goal.height = z ;
return ;
}
Daniel
Thanks for thinking a lot about the landing, and for editing up a fresh diagram. I appreciate your thoughts. I checked my trim for that flight, and you were right, that the plane was flying approx 10 meters below target altitudes. So that is why it flew at 1 meter above the ground when asked to be at 11 meters.
Looking forward to some more test flights with appropriate fixes for all the above. I am now hopeful that a Sonar based landing is going to work quite well.
Best wishes, Pete

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Nikolay Arsov
Do you know how the plane speed and sonar angle ( relative to ground surface ) affect the accuracy/sonar behavior?
Best regards
Nick
Peter Hollands
I only have my own empirical data, which is rather limited still.
Instead, here is some theory:-
My sonar points straight down, at right angles to the velocity vector of the plane.
The plane travels at 11m / second through the air.
The speed of sound is about 340m/s in dry at at 20 degrees C.
So at altitude 10m above the ground, the time taken for the soundwave to travel from the plane to the ground and back to the sonar is say ((10+10) / 340) seconds. i.e. 0.05 of a second.
If the plane is travelling at 11m/s then it will have travelled 11 * 0.05 m in that time. i.e. 0.55 meters. or half a meter in round terms.
It is an interesting question, because if the plane flies at 20m / second at an altitude of 10 meters, then the plane will have moved on more than 1 meter before the sound echoes back off the ground back up to the plane.
One could consider the idea of the acoustic sound transmitter being in the nose of the plane, and multiple sound receivers at various locations down the fuselage !

Best wishes, Pete
William Premerlani
{kind=link}
William Premerlani
{kind=link}
Nikolay Arsov
That's O.K., the plane speed do not affect the sonar, but what about the angle. While landing, the plane is pitched a bit or more and if the sonar axis is perpendicular to the plane axis, it could lead to echo signal pointing outside the plane/sonar.....just some thoughts.
Best regards
Nick
Peter Hollands
Pitch and Roll (which I call tilt) are calculated and allowed for in MatrixPilot firmware using the Direction Cosine matrix.
Provided there is still a return echo signal for the sonar, it can calculated the vertical height to ground, even though the plane is rolling or pitching.
It might be advisable for me to limit the validity of sonar returns to a given angle e.g. 30 degrees of roll / tilt. I have not done that yet.
Best wishes, Pete
DB
cos_pitch_roll = rmat[8] ;
if ( cos_pitch_roll > 16383 )
{
cos_pitch_roll = 16383 ;
}
Nikolay Arsov
It's perfect clear now.
Best regards
Nick
DB
Nikolay Arsov
Yes there's a lot of progress, but I'm a bit uneasy for announcing the AUAV2(tiny UDB5) as there are 2 unfinished parts:
1. Firmware;
2. Release candidate of the IMU board.
The baseboard is ready and I think there will be no modifications over it. The IMU has a slight modifications, but I need some time for the IMU RC1 ( rev.7 ) to be manufactured.
Attached are some pictures of the AUAV2_Alpha1 ( the RC1 pictures will be ready soon ).
Many thanks to the team - Mark Whitehorn,Robert Dickenson,Ben levitt,Peter Hollands,Riccardo Kuebler,Matthew Coleman and Bill Premerlani ! They all help the AUAV2 to have it's soul.
Best regards
Nick
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
William Premerlani
William Premerlani
Some more thoughts about accounting for tilt. My previous comments
were a simplification, its actually a bit more complicated than that.
First, lets take a couple of limiting, ideal cases.
First case, suppose the beam is a well focused, "pencil beam". In that
case, the measured distance is directed along the z axis of the plane,
and to convert it to earth frame you multiply by rmat[8].
Second case, suppose the beam is not focused at all, and spreads out
evenly in all directions. In that case, the sensor measures the earth
z distance directly, no need to convert it.
But the real case is somewhere between the first and second case. The
beam is not perfectly focused, and it is not perfectly unfocused
either.
So, what you really should do is measure the error as a function of
tilt angle, and use a lookup table to correct.
Best regards,
Bill
On Oct 8, 2:11 pm, William Premerlani <wpremerl...@gmail.com> wrote:
> Hi Peter,
> According to the physics, the sonar should be measuring the shortest
> distance between the sensor and the nearest reflecting surface (ground),
> which should be independent of tilt. In other words, there should not be
> any need to account for tilt.
> The only thing that tilt should impact is the intensity of the returned
> echo, but it should not impact the time for the echo to return.
> That is because the sound going out is not in a pencil beam. So, even when
> the plane is tilted, there is some sound going vertically downward, which
> will create an echo that will return sooner than any other part of the beam.
> Best regards,
> Bill
>
>
>
> On Monday, October 8, 2012 12:28:11 PM UTC-4, Pete wrote:
> > Hi Nick,
>
> > Pitch and Roll (which I call tilt) are calculated and allowed for in
>
> > Provided there is still a return echo signal for the sonar, it can
> > calculated the vertical height to ground, even though the plane is rolling
> > or pitching.
>
> > It might be advisable for me to limit the validity of sonar returns to a
> > given angle e.g. 30 degrees of roll / tilt. I have not done that yet.
>
> > Best wishes, Pete
>
>
> >> Hi Bill and Pete,
> >> That's O.K., the plane speed do not affect the sonar, but what about the
> >> angle. While landing, the plane is pitched a bit or more and if the sonar
> >> axis is perpendicular to the plane axis, it could lead to echo signal
> >> pointing outside the plane/sonar.....just some thoughts.
> >> Best regards
>
> - Show quoted text -
DB
Nikolay Arsov
No problem, you are always welcome.
Best regards
Nick
Peter Hollands
Thanks for your thoughts on the maths, and beam properties.
The datasheet for the Maxbotix MB1230 shows the beam properties in more detail.
On re-reading the maxbotix sonar datasheet, I see that it has an analog output, and they show typical analog patterns for targets that are returning sonar. One interesting aspect is the fact that the device can return multiple targets at multiple distances. This is interesting if one used an observer filter. Meaning, by using probability techniques (as taught by Sebastian Thrun for the Google Car courses), we could fuse our IMU and GPS information along with Sonar; could potentially work out which returned target pulse is a true pulse and much improve our range and filtering of the sonar. This would involve us using the Analogue input direct to the A/D on our own PIC. (Incidentally the PWM output of the MB1230 is produced by an on board PIC16F690.
For now, I'm happy with the quality of my own returned Sonar signal, and look for to auto-landing with it.
Best wishes, Pete
FYI: The full datasheet which includes beam details for the MB1230 is at this location.
DB
{kind=link}
Peter Hollands
Just to let you know I've reached a milestone of success. My plane has done a "Go Around" on detecting the ground closer than 4 meters of 2 flights and 6 "Go Arounds".
I enclose a video of the "Go Arounds"
I was correct that Logo needed a fix. But my own suggested fix earlier in this thread was wrong. Ben Levitt mentored me on that and "This fix in the MatrixPilot_Sonar Branch" is OK, and is what I flew today. (The fix is now flight tested, and analysed in telemetry OK). The Logo that I used in my last published flights (enclosed in line below), I used today, which was fine.
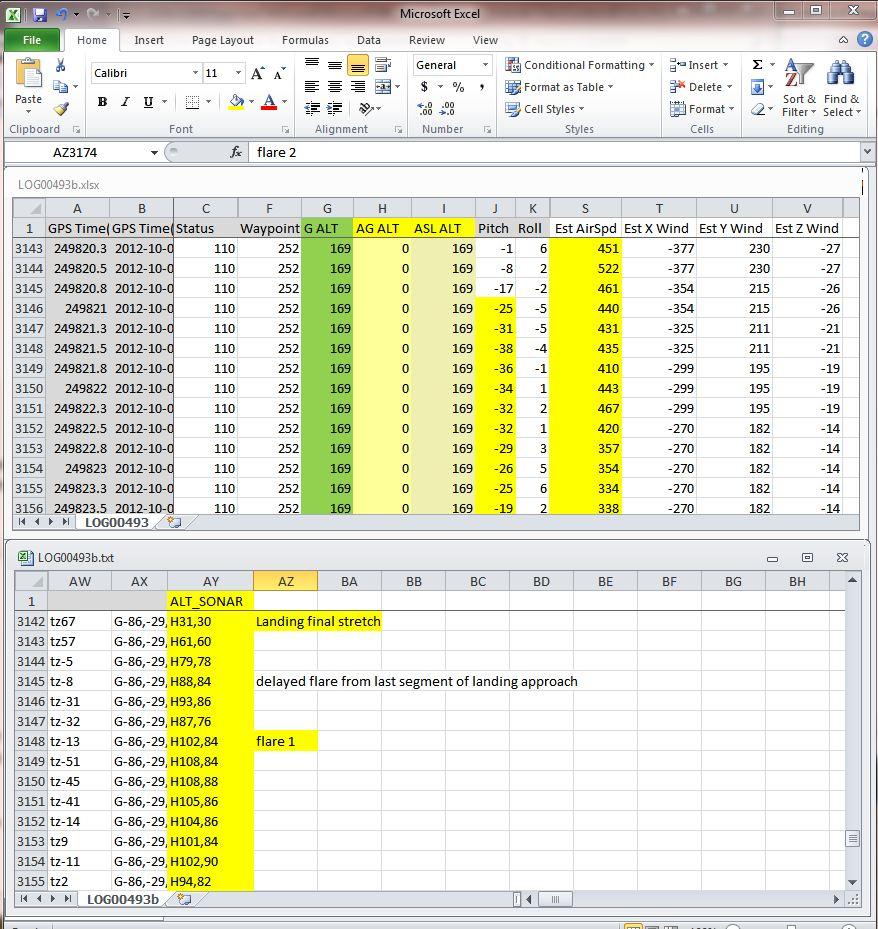
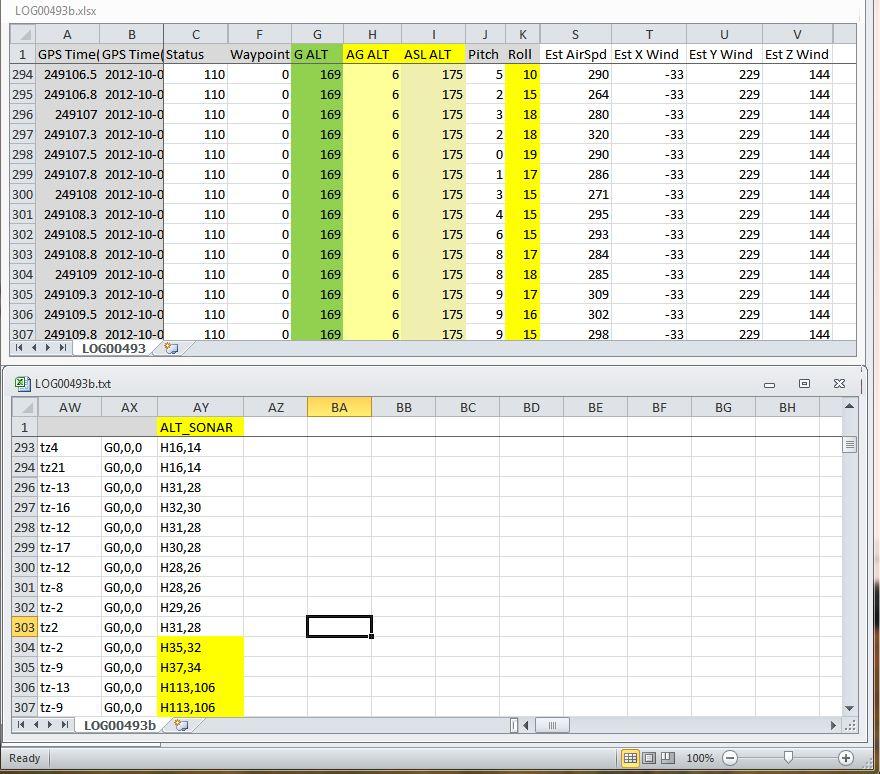
I enclose a screenshot of some analysis of the sonar in my spreadsheet with comments.
I'm happy that the sonar is working within the design limits that I have empirically measured.
Best wishes, Pete
// Example to fly an OVAL pattern attempt to land, and go around again when sonar sees ground.
#define RIGHT_180 1
#define GO_AROUND 2
#define STRAIGHT_LENGTH 100
#define LANDING_ALT_DIFF 40
const struct logoInstructionDef instructions[] = {
LOAD_TO_PARAM(ALT) // Remember our Altitude from when we went into Autonomouse Mode
FD(STRAIGHT_LENGTH)
REPEAT_FOREVER // Embark on a an oval shape. Forward 100m
DO(RIGHT_180) // Turn around by 180 degrees of a circle
FD(STRAIGHT_LENGTH) // Go back 100m
DO(RIGHT_180) // Do another graceful 180 degrees of a circle to finish Oval.
CLEAR_INTERRUPT // If you get to that point repeat this plan.
SET_ALT_PARAM // Set our desired Altitude back to the height at which we entered autonomous mode originally.
END
END
TO (RIGHT_180) // A subroutine for executing a nice 180 degree turn around a circle
REPEAT(18) // Do this 18 times (turning 10 degrees for 180 degrees)
FD(8) // Go forward 8 m
RT(10) // Right Turn 10 m
END
END
TO (GO_AROUND) // Interrupt routine for Going Around
IF_LT( ALT_SONAR, 400) // If ground is less than 400 centimeter (4 meters away)
ALT_UP(LANDING_ALT_DIFF - 1) // Set desire altitude to be 39 meters further up.
CLEAR_INTERRUPT
END
END
} ;
{kind=link}
{kind=link}
William Premerlani
DB
Hi Pete.
Very happy to see your flight’s repeated go-arounds and log data show delightfully consistent, perhaps conclusive results well aligned with the anticipated (descend and ascend) trajectories.
Congratulations.. it works! Well done!
All your efforts (including latest code modifications) have certainly covered a lot of positive ground in this initiative of including accurate soft landing capabilities in LOGO, using sonar.
I also would like to join Bill, in extending Ben well-deserved kudos, for LOGO, IMHO, an outstandingly powerful flight plan scripting function of MP.
Must say that the more I deal with (..gain understanding) LOGO, the more I appreciate the great mind behind it. (Currently, I’m attempting, more accurately, fumbling around, to introduce codes to capture during takeoff and use for landing: TAKEOFF~ ~POS and ~ANGLE…)
Perhaps, it’s now time to fuse sonar with navigation (“accurize”/optimize LOGO ALT~ related functions), as Bill recommends?
I hope for a weather break and opportunity to join you, further testing landing with sonar using attached scripts (pls. see attached snippets for details).
Unfortunately, relatively calm weather has recently become fast fleeting and rare with the onset of falls.
All the best.
Daniel