ReconstructMe 1.2 and SDK 1.5 released.
3,896 views
Skip to first unread message

Christoph Heindl
Mar 13, 2013, 1:51:52 PM3/13/13
to recons...@googlegroups.com
We've been quite quiet the last couple of weeks preparing a new release that especially improves in terms of speed. We now support OpenNI 2 and different sensor resolutions.
Give it a try and let us know what you think!
http://reconstructme.net/projects/reconstructmeqt/
Give it a try and let us know what you think!
http://reconstructme.net/projects/reconstructmeqt/

GeorgeM
Mar 13, 2013, 4:02:46 PM3/13/13
to recons...@googlegroups.com
Do you create an new console also or do you stop developing the console application?
Thanks
Am Mittwoch, 13. März 2D013 18:51:52 UTC+1 schrieb Christoph Heindl:
MagWeb
Mar 13, 2013, 8:25:45 PM3/13/13
to recons...@googlegroups.com
Just to give some idea of what you can get with the new version and its Carmine 1.09 support:
The attached results were done using Carmine 1.09 with glasses. Seems Carmine firmware (or OpenNi 2) performs some self calibration so adding glasses works fine without doing any external calibration :)
(Maybe caused by my hair ReMe sometimes had problems to create a surface doing a reduction.)
Christoph Heindl
Mar 14, 2013, 2:00:30 AM3/14/13
to recons...@googlegroups.com
Am Mittwoch, 13. März 2013 21:02:46 UTC+1 schrieb GeorgeM:
Do you create an new console also or do you stop developing the console application?Thanks
The development of the console is currently halted due to limited resources we can put on reconstructme. Once textures are in place we might continue to develop it.
Christoph Heindl
Mar 14, 2013, 2:03:36 AM3/14/13
to recons...@googlegroups.com
Am Donnerstag, 14. März 2013 01:25:45 UTC+1 schrieb MagWeb:
Just to give some idea of what you can get with the new version and its Carmine 1.09 support:The attached results were done using Carmine 1.09 with glasses. Seems Carmine firmware (or OpenNi 2) performs some self calibration so adding glasses works fine without doing any external calibration :)(Maybe caused by my hair ReMe sometimes had problems to create a surface doing a reduction.)
Wow! We didn't try glasses yet. Can you perform a 360° scan with glasses attached?

tim....@gmail.com
Mar 14, 2013, 4:01:23 AM3/14/13
to recons...@googlegroups.com
On Thursday, March 14, 2013 2:25:45 AM UTC+2, MagWeb wrote:
>
> Just to give some idea of what you can get with the new version and its Carmine 1.09 support:
> The attached results were done using Carmine 1.09 with glasses. Seems Carmine firmware (or OpenNi 2) performs some self calibration so adding glasses works fine without doing any external calibration :)
> (Maybe caused by my hair ReMe sometimes had problems to create a surface doing a reduction.)
OMG, what a nice results! I'm just amazed...
>
> Just to give some idea of what you can get with the new version and its Carmine 1.09 support:
> The attached results were done using Carmine 1.09 with glasses. Seems Carmine firmware (or OpenNi 2) performs some self calibration so adding glasses works fine without doing any external calibration :)
> (Maybe caused by my hair ReMe sometimes had problems to create a surface doing a reduction.)
Can you upload some raw pointcloud or mesh please?

a.peguer...@gmail.com
Mar 14, 2013, 4:49:37 AM3/14/13
to recons...@googlegroups.com
WOW¡¡One of the best scann¡¡
You get calibration whit glasses or calibrate and change config file later??
Many thanks¡¡
You get calibration whit glasses or calibrate and change config file later??
Many thanks¡¡
MagWeb
Mar 14, 2013, 5:46:10 AM3/14/13
to recons...@googlegroups.com, a.peguer...@gmail.com
I did nothing more than fixing the glasses and adjusting volume dimensions/distance. Seems: No need to change the sensor's configuration.
MagWeb
Mar 14, 2013, 6:16:28 AM3/14/13
to recons...@googlegroups.com
Seems to be no problem. (it seems with increasing scanning time Carmine looses precision (temperature). If you restart the device all is fine again)
Attach an image of a scan of a skiing boot with 2.5 glasses (or maybe 3.0? - not sure any more) - No tweaking of the default calib parameters.
Christoph Heindl
Mar 14, 2013, 7:38:30 AM3/14/13
to recons...@googlegroups.com
Am Donnerstag, 14. März 2013 11:16:28 UTC+1 schrieb MagWeb:
Seems to be no problem. (it seems with increasing scanning time Carmine looses precision (temperature). If you restart the device all is fine again)Attach an image of a scan of a skiing boot with 2.5 glasses (or maybe 3.0? - not sure any more) - No tweaking of the default calib parameters.
Hah, just great...nearly fell off my chair.
Christoph Heindl
Mar 14, 2013, 7:40:08 AM3/14/13
to recons...@googlegroups.com
Did you try the head-settings we supplied as config with the new Release?
MagWeb
Mar 14, 2013, 8:09:16 AM3/14/13
to recons...@googlegroups.com
Am Donnerstag, 14. März 2013 12:40:08 UTC+1 schrieb Christoph Heindl:
Did you try the head-settings we supplied as config with the new Release?
Sure, but all these are for test purposes only so I tried some tweaks here:
For the facescan I slightly modified the HeadHighDetail settings this way (all other parameters as in HeadHighDetail):
- Volume 300x300x300 instead of 400x400x400
- DataIntegration/Truncation: 4 instead of 5
- CameraTracking/LocalSearch/MaximumIterations: 15 instead of 30
- CameraTracking/LocalSearch/MaximumPointDistance: 10 instead of 20
- CameraTracking/GlobalSearch/MaximumDepth: 1000 instead of 2000
For the boot:
- same tweaks as above but at a volume of 400x400x400
Not sure at all whether all these tweaks make sense - but that´s the way I did it - any suggestions?

cadm...@gmail.com
Mar 14, 2013, 7:27:37 PM3/14/13
to recons...@googlegroups.com
James
MagWeb
Mar 14, 2013, 7:44:02 PM3/14/13
to recons...@googlegroups.com, cadm...@gmail.com
I'm going to aska pretty dumb question here, but I've just got a Primesense 1.09... when you say 'try it with glasses' do you literally mean put the glasses on the scanner, or do you mean, there is a tweek in the program where I can magnify the image scanned?
James
Yes, no joke.... :-) Simply fix up to +2.5 reading glasses.
Looks like:
But now, doing further examination:
Yes, it works without calibration (using a Carmine 1.09) ..... but you can improve results tweaking the sensors calibration parameters. More tomorrow (hopefully...)
Christoph Heindl
Mar 15, 2013, 2:04:54 AM3/15/13
to recons...@googlegroups.com, cadm...@gmail.com
Am Freitag, 15. März 2013 00:44:02 UTC+1 schrieb MagWeb:
But now, doing further examination:Yes, it works without calibration (using a Carmine 1.09) ..... but you can improve results tweaking the sensors calibration parameters. More tomorrow (hopefully...)
Great, can't wait for the results :)

Alfred
Mar 16, 2013, 8:40:15 PM3/16/13
to recons...@googlegroups.com
Hello MagWeb,
Can you tell us the specifications of your hardware (cpu, mem, gpu, and window version) you are using to achieve such great results. It is out of this world what you are achieving and I congratulate you. Do you do any post processing of the data you get from reconstruct afterward?
My regards, Alfred
MagWeb
Mar 17, 2013, 11:25:34 PM3/17/13
to recons...@googlegroups.com
Am Sonntag, 17. März 2013 01:40:15 UTC+1 schrieb Alfred:
Hello MagWeb,Can you tell us the specifications of your hardware (cpu, mem, gpu, and window version) you are using to achieve such great results. It is out of this world what you are achieving and I congratulate you. Do you do any post processing of the data you get from reconstruct afterward?
I´m running ReMe on an IMac (Win7 64 via bootcamp): CPU: 3.4 GHz Intel Core i7, GPU Radeon HD 6970M 2048MB, 12GB RAM.
The results shown here are ReMe native with outliers removed. Some are Poisson fused (using DAVID3 at res 1000) to get rid of holes. No post processing of the topology.
Here some new ones using glasses of different strengths (for it's early in morning here: more comments tomorrow)
MagWeb
Mar 17, 2013, 11:32:00 PM3/17/13
to recons...@googlegroups.com
Ups, something ate my text on the images:
Sheep: Object's size: width 17cm, height 15cm, depth 10cm
Shoe: Size 42 (Germany)
Saint: Object's height 30 cm
BodyParts: Done using a motorized circular setup

Tony Buser
Mar 17, 2013, 11:49:08 PM3/17/13
to ReconstructMe
This looks great, do you have any examples of scans of an object with and without glasses? How much trouble are you having capturing whole objects with glasses?
--
You received this message because you are subscribed to a topic in the Google Groups "ReconstructMe" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/reconstructme/hLXVp8eYq2I/unsubscribe?hl=en.
To unsubscribe from this group and all its topics, send an email to reconstructm...@googlegroups.com.
For more options, visit https://groups.google.com/groups/opt_out.
MagWeb
Mar 18, 2013, 5:09:35 PM3/18/13
to recons...@googlegroups.com
Am Montag, 18. März 2013 04:49:08 UTC+1 schrieb Tony Buser:
This looks great, do you have any examples of scans of an object with and without glasses? How much trouble are you having capturing whole objects with glasses?
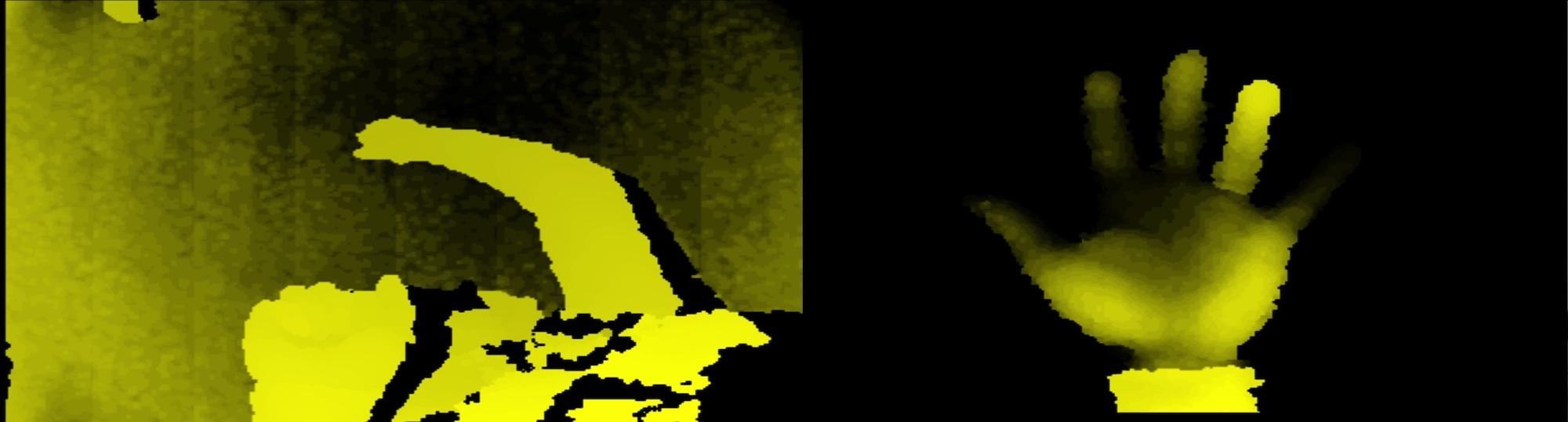
Attached a comparison of results done with Carmine 1.09 without(lefthand) and with (righthand) +3 lenses. I think the obviously visible difference justifiers some efforts.
But there are calibration problems.
If you compare the depthmap stream (here via OpenNIViewer) you can notice that the (256?) depth values are spread over a "viewing depth" starting at 30cm of up to 800cm without lenses. With added +3 lenses these 256 steps of depth are condensed on a depth of about 15cm also starting at the same minimal distance (seems to be due to the intersection angle of cam and projection). 2.5 lenses do the same at a range 30cm up to about 75cm. This seems to be the either effect improving the scan's quality.
The sensor does not notice that you added a lens. Starting the sensor it seems to search for decodeable data. This may last some seconds but you should get a stable depthimage if there is something in the detectable range.
Now you should do a test scan of a rather flat scene (e.g. the keyboard on your desk) keeping the sensor looking perpendicular to it. Have a look on its result. It should be flat too. If not (somehow bowed) your lenses are out of the optical axes of sensor/projector. As long as you do not move too far or tilt the sensor scanning should work as usual giving finer results.
Unfortunately you loose some of the finer details moving the sensor freely around. Maybe you loose tracking at all.
This seems to be due to the integration of incoming new data. The depth stream is written on the device not knowing that there were lenses. It seems to calculate consistent depths based on a now wrong intersection angle. This results in partial "meshes" (= results of each single frame) being a little more convex than they should be. So they do not fit together the best way in Z. One has to flatten down the incoming partial meshes.
ReME gives the option to modify the sensors calibration in the sensor settings. If you grab calibration parameters using ReMeConsole you should get higher values for fx/fy with added "+" lenses (which is consistent to 2D photography). BUT you cann´t use these values on depth images with the current possibilities of ReMe. Measuring a result with the "right" values you get right values along X and Y, but in Z these are not right in ratio (to high). See image "Round.png" a result scanning a round pot with "right" parameters. You may notice its oval shape (along Z). One has to compensate the "error" that happened on the device with an inverse strategy:
Decreasing Fx/Fy results in a flatter mesh (in Z). All my tests using ReMe pointed me to the direction to decrease Fx/Fy (against better knowing) relative to the default calibration + when lenses were added. Now this seems to be clear now.
If the focal length increases to a new value "B" the sensor calculates wrong data based on the default focal length "A". So the error should be corrected if you put in a faked focal length "C" where C = A - ( B - A)
(This way one looses the right scale, but all data should be proportional). There maybe some more still unknown things to be considered...
Even better would be an implemented depth error correction to keep the right scale. But this would need a real 3D calibration routine : Maybe by scanning a known shape (maybe a cube viewed 3D-diagonally) and comparing the depth image with a ideal one. This would be great!
Tony Buser
Mar 18, 2013, 5:38:49 PM3/18/13
to ReconstructMe
Awesome info, thanks! So the glasses still causes loss of tracking like they did on the kinect. It would be great to see a scan of that boot using a kinect with and without glasses and a carmine with and without. :) I'm actually pretty impressed with the first scan using carmine without glasses, too.
--
MagWeb
Mar 18, 2013, 8:56:26 PM3/18/13
to recons...@googlegroups.com
As soon as I'm through I'll give a further comparison. Also I'm not convinced yet whether the rigid compression of depth data as they are caused by using +3 glasses is a optimal thing. Maybe +2.5 is a better route to go....
In addition to what I said in my last message:
Does anybody know whether the streaming depth images
A) ... are calculated using a actual focal length (somehow measured on the device)
or
B) ... are calculated using a fixed, ideal focal length (some theoretical and averaged setting ignoring production inaccuracies)
If B is the case - I tend to this assumption for these Primesense devices are made for simpler tasks than 3D reconstruction without need to be so accurate - and I´m right with the things I said before, this would mean that a used measured focal length differs the same way from the actual used ideal value.
Think the focal length values in ReMe are the result of measurement(s) for there are so many number behind the colon. The result would be a slightly of Z value (even for devices without glasses) causing tracking problems and worse merging.
I thought to have seen some focal length specifications for Kinect or Xtion before. But googling quite a while now, I'm not able to find this information...
Christoph Heindl
Mar 19, 2013, 1:52:15 AM3/19/13
to recons...@googlegroups.com
Am Montag, 18. März 2013 22:09:35 UTC+1 schrieb MagWeb:
Am Montag, 18. März 2013 04:49:08 UTC+1 schrieb Tony Buser:This looks great, do you have any examples of scans of an object with and without glasses? How much trouble are you having capturing whole objects with glasses?Attached a comparison of results done with Carmine 1.09 without(lefthand) and with (righthand) +3 lenses. I think the obviously visible difference justifiers some efforts.
One thing I forgot to mention. The Carmine is able to to produce depth data in units of 0.1mm. You can enable this in ReMe sensor config by replacing
units: UNIT_1MM
with
units: UNIT_100UM
Note when changing this, the world unit becomes 0.1mm instead of 1mm, therefore you need adapt all the configuration values in the standard ReMe config that corresponded to MM (by multiplying by 10).
Best,
Christoph

bells...@gmail.com
Mar 25, 2013, 9:13:22 AM3/25/13
to recons...@googlegroups.com
Most excellent work.
Have you been able to do any captures of a larger volume with this level of detail? Like for a whole person, using carmine 1.09?
Thanks,
-Scott
Have you been able to do any captures of a larger volume with this level of detail? Like for a whole person, using carmine 1.09?
Thanks,
-Scott
MagWeb
Mar 25, 2013, 12:35:57 PM3/25/13
to recons...@googlegroups.com, bells...@gmail.com
You´ve t o keep in mind that the level of details depends on the ability to save them in the defined volume too. This volume owns some limited resolution. The highest resolution my GPU offers is 512x512x512 points spread over the defined dimensions. So it makes no sense to try to get that level of details using a single volume on big objects. To get that level will need some different volumes (means partial scans)
You could try ReMeConsole's multiscan/stitch functionality and fuse the stitched results.

donbriddona...@gmail.com
Mar 25, 2013, 2:16:48 PM3/25/13
to recons...@googlegroups.com
Hi I want to use this great software but I have a problem...I can't get my carmine 1.09 drivers installed...not of the programs or test detect my sensor can someone please tell me how to install the drivers and wich ones to use please...thx in advance
Don
Christoph Heindl
Mar 25, 2013, 2:29:03 PM3/25/13
to recons...@googlegroups.com, donbriddona...@gmail.com
Hi,
Am Montag, 25. März 2013 19:16:48 UTC+1 schrieb donbriddona...@gmail.com:
Am Montag, 25. März 2013 19:16:48 UTC+1 schrieb donbriddona...@gmail.com:
Hi I want to use this great software but I have a problem...I can't get my carmine 1.09 drivers installed...not of the programs or test detect my sensor can someone please tell me how to install the drivers and wich ones to use please...thx in advance
the homepage is currently in the flux, so here's a direct link:

Richard Beck
Mar 29, 2013, 9:24:57 PM3/29/13
to recons...@googlegroups.com, cadm...@gmail.com
I had the same question, but from what I an tell it looks like they are talking about cheap reading glasses you can buy at a drugstore (+2.5, +3). I am assuming you take the arms off.

James Allan
Apr 1, 2013, 9:06:06 PM4/1/13
to recons...@googlegroups.com, cadm...@gmail.com
I simply popped the lenses out of the frames and attached them to the scanner. Works a treat.

Alex Neto
May 11, 2013, 10:28:54 AM5/11/13
to recons...@googlegroups.com
Hello you could provide some models for analysis is fantastic !!!
mis...@surfsun.com
May 12, 2013, 3:28:19 PM5/12/13
to recons...@googlegroups.com
Oh MY GOD
that is some great detail scans compared to mine
you got so much detail expecialy on the boots
but ime alittle confused to to all the text here do to my dyslexia
you didnt recalibrate, you just add the lenses and scan at 400 400 400 volume
and the few lines you changed in one of the posts ?
You are scanning this with the console version ?
What is the scanning procedure , is the kinect standing still and your moving the object / boot infront of it
or do you have the boot / face still, and move the kinect around infront of it to scan ?
or how do you do it
i did recalibrate mine and all but i got a hard time getting smaller details on the model
witch seems like you dont, expecialy on the last boot example where we can
even read the text
thats amazing
mind to share some info ?
mis
that is some great detail scans compared to mine
you got so much detail expecialy on the boots
but ime alittle confused to to all the text here do to my dyslexia
you didnt recalibrate, you just add the lenses and scan at 400 400 400 volume
and the few lines you changed in one of the posts ?
You are scanning this with the console version ?
What is the scanning procedure , is the kinect standing still and your moving the object / boot infront of it
or do you have the boot / face still, and move the kinect around infront of it to scan ?
or how do you do it
i did recalibrate mine and all but i got a hard time getting smaller details on the model
witch seems like you dont, expecialy on the last boot example where we can
even read the text
thats amazing
mind to share some info ?
mis
mis...@surfsun.com
May 12, 2013, 3:33:27 PM5/12/13
to recons...@googlegroups.com
might i add
i checked my console configs for the settings you menchen"
i checked my console configs for the settings you menchen"
For the facescan I slightly modified the HeadHighDetail settings this way (all other parameters as in HeadHighDetail):
- Volume 300x300x300 instead of 400x400x400
- DataIntegration/Truncation: 4 instead of 5
- CameraTracking/LocalSearch/MaximumIterations: 15 instead of 30
- CameraTracking/LocalSearch/MaximumPointDistance: 10 instead of 20
- CameraTracking/GlobalSearch/MaximumDepth: 1000 instead of 2000
Why dont i see those values in the console config file ?
am i missing somthing here
mis
am i missing somthing here
mis
mis...@surfsun.com
May 12, 2013, 3:56:51 PM5/12/13
to recons...@googlegroups.com
Look at my resolt
scanning with console 400 400 400
in a 50cm box
i scanned the boot normaly and i scanned it with +3.0 glasses on
and yes i can see the 3.0 has alittle more detail then the normal one
but still, ime so far away from your detail level
and with the glasses it seems its very hard to scan the full object
as it seems alot of the stuff is disapering for some reason i do not know
as you see the normal scan has alot more of the boot and the chair
the the one with the glasses
but missing alot of the detail still that you have
scanning with console 400 400 400
in a 50cm box
i scanned the boot normaly and i scanned it with +3.0 glasses on
and yes i can see the 3.0 has alittle more detail then the normal one
but still, ime so far away from your detail level
and with the glasses it seems its very hard to scan the full object
as it seems alot of the stuff is disapering for some reason i do not know
as you see the normal scan has alot more of the boot and the chair
the the one with the glasses
but missing alot of the detail still that you have
mis...@surfsun.com
May 12, 2013, 3:59:19 PM5/12/13
to recons...@googlegroups.com


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
masa...@gmail.com
Jul 22, 2013, 8:14:25 AM7/22/13
to recons...@googlegroups.com, gwe...@googlemail.com
On Thursday, March 14, 2013 12:25:45 AM UTC, MagWeb wrote:
> Am Mittwoch, 13. März 2013 18:51:52 UTC+1 schrieb Christoph Heindl:We've been quite quiet the last couple of weeks preparing a new release that especially improves in terms of speed. We now support OpenNI 2 and different sensor resolutions.
> The attached results were done using Carmine 1.09 with glasses. Seems Carmine firmware (or OpenNi 2) performs some self calibration so adding glasses works fine without doing any external calibration :)
> (Maybe caused by my hair ReMe sometimes had problems to create a surface doing a reduction.)
This looks really nice. Do you happen to know whats the accuracy of these ReconstructME scans? is the accuracy comparable to 3D laser scanners?
> Am Mittwoch, 13. März 2013 18:51:52 UTC+1 schrieb Christoph Heindl:We've been quite quiet the last couple of weeks preparing a new release that especially improves in terms of speed. We now support OpenNI 2 and different sensor resolutions.
>
> Give it a try and let us know what you think!
>
> http://reconstructme.net/projects/reconstructmeqt/
>
>
> Just to give some idea of what you can get with the new version and its Carmine 1.09 support:
> Give it a try and let us know what you think!
>
> http://reconstructme.net/projects/reconstructmeqt/
>
>
> The attached results were done using Carmine 1.09 with glasses. Seems Carmine firmware (or OpenNi 2) performs some self calibration so adding glasses works fine without doing any external calibration :)
> (Maybe caused by my hair ReMe sometimes had problems to create a surface doing a reduction.)
This looks really nice. Do you happen to know whats the accuracy of these ReconstructME scans? is the accuracy comparable to 3D laser scanners?
Teddy Hansen
Jul 23, 2013, 1:27:49 PM7/23/13
to recons...@googlegroups.com
Sounds very interesting is that the qt version only or Also the console version ?
Do you have an aprox date of release so we Got something to look forward to
Reply all
Reply to author
Forward
0 new messages