TinyG firmware improved

ma...@makr.zone
"This Pull Request implements the common RS274/NGC/G-code commands M114, M115 and M400.

Tony Luken

Clemens Koller
Do you have a suitable machine.xml to share for the (likely) Liteplacer which you use with
FIRMWARE_NAME:TinyG, FIRMWARE_URL:https://github.com/synthetos/TinyG, FIRMWARE_VERSION:444.23
?
And can you point me to the git commit to recreate this version?
I'm planing to test this, as soon as time permits.
Regards,
Clemens
--
On 29/10/2020 01.38, ma...@makr.zone wrote:
> Hi everybody
>
> To further improve support for Advanced Motion Control and to unify the Gcode "world", I just made a Pull Request for TinyG.
>
>
> * /|M114|: Get current position <https://www.reprap.org/wiki/G-code#M114:_Get_Current_Position>/
> * /|M115|: Get Firmware Version and Capabilities <https://www.reprap.org/wiki/G-code#M115:_Get_Firmware_Version_and_Capabilities>/
> * /|M400|: Wait for current moves to finish <https://www.reprap.org/wiki/G-code#M400:_Wait_for_current_moves_to_finish>"/
> https://github.com/synthetos/TinyG/pull/257
>
> The firmware and a batch to flash under Windows is here (you need to change the COM port in the .cmd):
>
>
> Any testers? :-)
>
> *As always: be cautious - no warranties!
> *
>
> _Mark
>
> **
>
> --
> You received this message because you are subscribed to the Google Groups "OpenPnP" group.
> To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com <mailto:openpnp+u...@googlegroups.com>.
> To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/8002fa09-9859-4a45-b361-1dcdee2b85a5o%40googlegroups.com <https://groups.google.com/d/msgid/openpnp/8002fa09-9859-4a45-b361-1dcdee2b85a5o%40googlegroups.com?utm_medium=email&utm_source=footer>.
Tony Luken
> To unsubscribe from this group and stop receiving emails from it, send an email to ope...@googlegroups.com <mailto:ope...@googlegroups.com>.
ma...@makr.zone
Thanks a lot, Tony.
There is a new firmware now in the PR
https://github.com/synthetos/TinyG/pull/258
... and in the download link.
It fixes the M400 "ok" response.
It also introduces a new M201.3 command to control jerk. More on
that a bit later.
_Mark
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/89d79f30-8826-461a-8430-1d651c18f68fo%40googlegroups.com.
ma...@makr.zone
Hi everybody
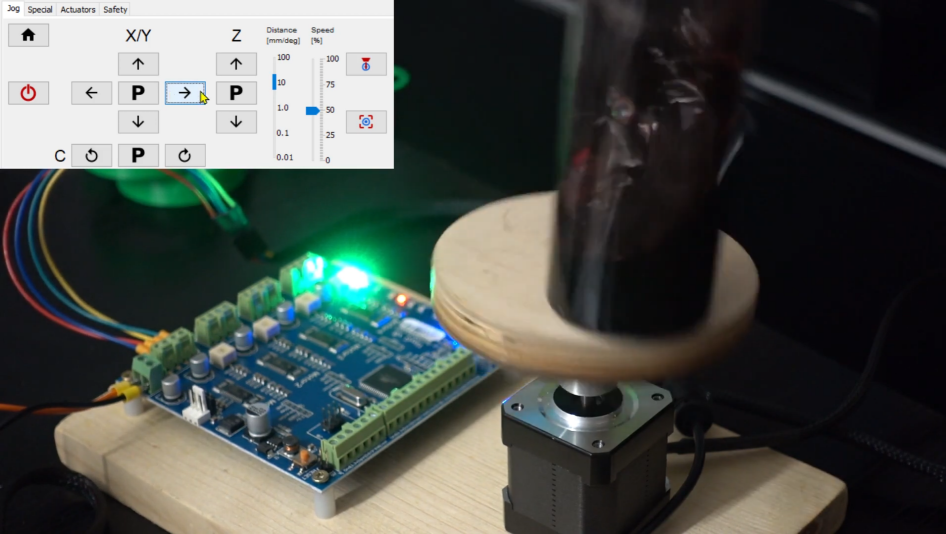
Watch the video with TinyG demonstrating its true Jerk
control, but also how important it is to be well Speed-Controlled
by the new OpenPnP Advanced Motion Control testing version.
There is a new firmware now in the PR
https://github.com/synthetos/TinyG/pull/258
... and in the download link.
OpenPnP testing version Update 4 will be up soon.
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/9bbdb78f-27d4-3f7d-ceff-a2cb4c0f76af%40makr.zone.
ma...@makr.zone
Hi TinyG users!
All things now linked and documented here:
https://makr.zone/tinyg-new-g-code-commands-for-openpnp-use/577/
Vote up the PR :-)
https://github.com/synthetos/TinyG/pull/258 (frankly I don't know how "active" this product still is)
@Clemens, thanks for your willingness for testing this! Tony has
already sent you his machine.xml.
He is definitely the "Liteplacer+TinyG man" ;-) I have a different
controller on my Liteplacer, I just wanted TinyG to work well with
my Advanced
Motion Control work on OpenPnP, hence the firmware changes.
My TinyG test rig here is just for lab bench testing.
@Tony, any chance you could test the newest version too?
- Flash the newest firmware.
- Download the latest OpenPnP testing version.
- Use the Issues & Solutions system to go through the needed
changes.
- Do convert to the GcodeAsyncDriver.
- The Issues & Solutions system won't overwrite an already
existing CONNECT_COMMAND, so you need to add the following
manually:
- Get rid of status reports $sv=0 (no unsolicited reports wanted).
- Switch to RtsCts flow control $ex=2
- Get rid of MOVE_TO_COMPLETE_REGEX (replaced by proper M400).
- Test proper move waiting/completion.
- Confirm asynchronous operation with/without Confirmation Flow
Control.
https://github.com/openpnp/openpnp/wiki/GcodeAsyncDriver#advanced-settings - It uses position reporting M114 as a signal when Confirmation
Flow Control is off.
- If possible: reduce your CONNECT_COMMAND to the minimum/generic TinyG+Liteplacer solution*.
- Send the machine.xml again?
*) Am I right to assume that all the
config you have in there is written into the EEPROM on each
connect? Is there no danger, the EEPROM fails at some point? I
haven't found any conclusive info on that quickly (and frankly
this is a bit our of the scope for me :-})
Many, many thanks!
_Mark
ma...@makr.zone
@Tony
> Am I right to assume that all the config you have in
there is written into the EEPROM on each connect? Is there no
danger, the EEPROM fails at some point? ...
It seems it will only be written, if the assigned value changes --> fp_NE()
So I guess value changes can only happen in CONNECT_COMMAND, if
it contains mistakes, such as multiple disagreeing assignments of
the same variable.
_Mark
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/2857f0ba-b16f-0972-e97f-d9921c03e292%40makr.zone.
Tony Luken
To unsubscribe from this group and stop receiving emails from it, send an email to ope...@googlegroups.com.
ma...@makr.zone
Hi Tony
In terms of responses, M400 specifically only affects
the text mode output.
I don't understand how the non-standard json stuff works. These
responses are somehow triggered asynchronously and periodically,
and I haven't found a way to block or postpone them in a safe
way. I got the impression that using this json stream entails
polling for a specific status anyway, so these types of senders
should still work correctly.
M400 still blocks any subsequent commands, even in json mode, so
its actual function is still valid. Example: If you want
to wait for motion to complete and bring the machine to
still-stand, before reading a sensor etc. this still happens
correctly in command sequence execution.
For a json sender to detect the point in time when this happens,
polling is needed (as before).
For a text sender to detect the point in time when this happens
(Pick&Place is very lonely an application in this respect) it
will have to look for the "ok". If Tiny was switched to json mode
by mistake, it will never be detected. A timeout will occur. No
crash will happen.
With canned G-code (like in OpenPnP) I don't see a way how you
would accidently activate json. And if it happens, I expect it
generates many other problems too.
The effort here is to make TinyG as "standard" a controller as
possible. Text mode is simply mandatory. M114 and M115 also only
output text mode compatible responses. I should probably even
suppress or even reject them in json mode.
TinyG is a nice controller internally (compared to the others, I
know). Nice, clean and uniform concepts in the code. Meta-data
driven config, all done through Gcode. I guess it would be fine to
have a json monitoring/control port aside from the G-code
port (separate serial or some sort of transparent stream
multiplexing). But mixing them in the same stream is really bad
form, IMHO.
Unfortunately, the successor g2 core has the same strange
affliction.
_Mark
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/b07d9742-1350-48ce-ad0d-166e3ae81e11o%40googlegroups.com.
Tony Luken
Furthermore, manually sending another M114 results in a new position report showing zero for the z coordinate but the DRO still doesn't update. I have Location Confirmation checked:
Any testers? :-) *As always: be cautious - no warranties! * _Mark ** -- You received this message because you are subscribed to the Google Groups "OpenPnP" group. To unsubscribe from this group and stop receiving emails from it, send an email to ope...@googlegroups.com <mailto...@googlegroups.com>. To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/8002fa09-9859-4a45-b361-1dcdee2b85a5o%40googlegroups.com <https://groups.google.com/d/msgid/openpnp/8002fa09-9859-4a45-b361-1dcdee2b85a5o%40googlegroups.com?utm_medium=email&utm_source=footer>.
ma...@makr.zone
Hi Tony
thanks for testing!
ContactProbeNozzle:
I forgot one Issues & Solution suggestion: you need to enable
the Machine Coordination After Actuation checkbox on the
probing Actuator. (I have now added that suggestion).
https://github.com/openpnp/openpnp/wiki/Motion-Planner#actuator-machine-coordination
This will make sure the reported location is processed. Please
look at the log. If it says "Reported location changes current
location ..." then it should be good.
Background:
Processing reported locations only work when a position
report is issued in the course of a planner waitForCompletion().
Unfortunately, this restriction proved necessary because the
different drivers have different semantics of their M114. Some
will report the last position (G1 milestone) the machine has
already reached while it may still be moving to the next, some may
even report the real-time position while moving, some the next
position that will be reached and some the position that was last
commanded (which can be several moves ahead). So these reports are
only reliable across all types of drivers once the machine is idle
and in complete still-stand. As it turned out, this poses no
problems IMHO, as OpenPnP only really needs to know a location
when the machine must come to still-stand anyway.
Therefore, the After Actuation checkbox is needed.
For the same reason, issuing a M114 on the console will
unfortunately not work anymore. I don't want the console to do
anything "magic" behind the back of the user, so the
waitForCompletion() that could process the report will
not be done because the console could have commanded anything and
I don't know in what (moving) state the machine is and what
semantics the M114 has on that particular controller.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/c43df8d9-25e8-4705-a6ca-4f59f7894116o%40googlegroups.com.
Tony Luken
To unsubscribe from this group and stop receiving emails from it, send an email to ope...@googlegroups.com.
Tony Luken
ma...@makr.zone
Hi Tony
OpenPnP never caught spontaneous errors immediately. Errors are only processed when a command is sent and a response is then expected. It catches COMMAND_ERROR_REGEX matches or IO problems and throws.This remains the same. So it takes the next command/receive
to catch the error. I never really second-guessed that but I
assume it has to be that way because all error handling must be
done in the machine thread, i.e. the exception must be thrown
there to trip any ongoing Job or user action machine runnable for
good.
https://github.com/openpnp/openpnp/blob/7e18341cc64f673576ccfa3a9032eb4e1de9e0ea/src/main/java/org/openpnp/machine/reference/driver/GcodeDriver.java#L1087
https://github.com/openpnp/openpnp/blob/7e18341cc64f673576ccfa3a9032eb4e1de9e0ea/src/main/java/org/openpnp/machine/reference/driver/GcodeDriver.java#L316
https://github.com/openpnp/openpnp/blob/7e18341cc64f673576ccfa3a9032eb4e1de9e0ea/src/main/java/org/openpnp/machine/reference/driver/GcodeDriver.java#L758
Now it is done in bailOnError and this is called before any send or receive.:
I actually do process the error immediately in the ReaderThread:
But I'm very reluctant to change this behavior. It would have to
be done twice then, firstly to alert the user (Message Box) and
secondly to trip the machine thread (while selectively suppressing
a duplicate MessageBox). And it would have to be aware when no
thread is pending and then not do the trip. Sounds too complicated
for a rather exotic use case.
_Mark
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/e0010f85-a795-4b91-95eb-a6c0b463bbafo%40googlegroups.com.
ma...@makr.zone
Tony,
There a two separate features:
- 3rd order/Jerk Control: TinyG always/only has that mode (but see below).
- Unccordinated motion i.e. not only allowing straight moves i.e. Motion Blending.
Re 1:
Theoretically, TinyG does not support true Full3rdOrderControl.
Remember the discussion about the 5 segment only S Curve
versus the 7 segment S Curve? TinyG misses the constant
acceleration limit segments, in fact you can't even set an
acceleration limit, only a jerk limit. So your jerk limit together
with your feed-rate limit actually only implicitly sets
the maximum acceleration that the steppers are exposed to.
So there is no acceleration plateau (look at the two curve below) however, TinyG does something similar in shape, internally using a 6th order curve, apparently (I haven't studied that code yet).
https://github.com/synthetos/TinyG/wiki/Jerk-Controlled-Motion-Explained
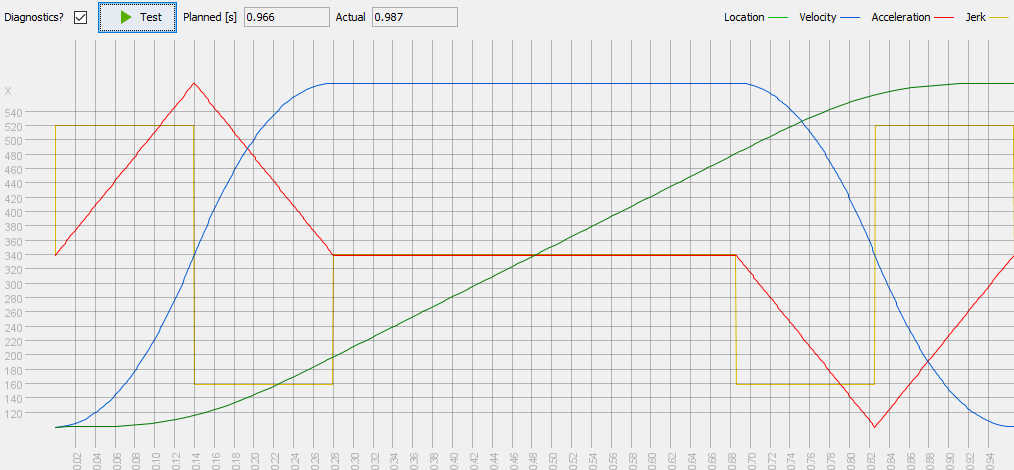
Therefore if you set Full3rdOrderControl with a guesstimated acceleration limit, it happens to be closer in Actual time, than the SimpleSCurve mode:
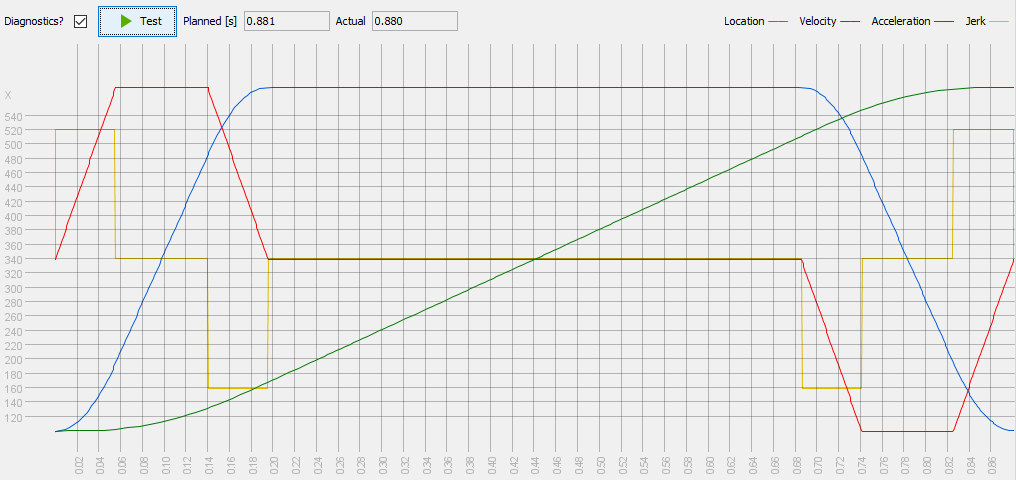
With the SimpleSCurve mode we don't allow a constant acceleration
limit plateau and have to limit the jerk instead, to not exceed
the acceleration limit. But TinyG's 6th order curve will then not
go into the triangular "peaks" and it takes longer than planned.
OpenPnP currently can't accurately predict TinyG 6th order formula
(and I don't think it ever will).
Physically, this is really cool on the TinyG. Watch this video, how absolutely stable the liquid stays:
The simulation/interpolation with stepped accelerations is really only a crutch in comparison.
Re 2:Unccordinated motion/Motion Blending is a separate topic. It is
enabled by the "Allow Uncoordinated" checkbox:
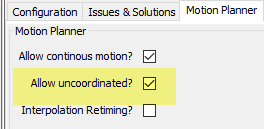
But I'm afraid it is not supported on TinyG.
The problem: TinyG does not allow acceleration != 0 in junctions.
And my Motion Blending planner can only work if this is allowed
(or irrelevant as it is in Constant or rather "Instant"
Acceleration controllers).
_Mark
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/4e50cbb9-133d-4f53-8246-7189531df500o%40googlegroups.com.

Peter Chaisty
ma...@makr.zone
You seemed to have had an older version of TinyG before.
There seems to be a change of behavior (or new bug?) in G92 in
the base version (build 440.20) that I based my firmware on.
You need to state all axes in G92, including the A axis.
Otherwise it seems to move to a random coordinate (probably
uninitialized memory?). And at speed 600° per minute that may take
a veeeery long time.
In fact, according to Tony you must not use G92 but G28.3.
https://groups.google.com/g/openpnp/c/R1YOUW9oLZM/m/1Qes8WQUBAAJ
Make sure to be aware of the Xon/Xoff situation too and set it on TinyG if you haven't yet.
$ex=1
followed by disconnect/reset.
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/1a1ac40a-ab29-4ccb-8de2-d7eb1dafc986n%40googlegroups.com.
tony...@att.net
Peter Chaisty
M9
G90
G28.2 X0 Z0
G28.2 Y0
G28.3 X0 Y0 Z0
; G92 commented out replaced by G28.3 G92 X0 Y0 Z0
$ex=1
$ME
$1pm=1
$2pm=1
$3pm=1
$4pm=1
$mt=1000000000
G21 G90
; G92 X0 Y0 Z0 A0 M8 M5
$xjm=1200
$xvm=10500
$xsv=2000
$xsn=3
$xjh=800
$xsx=2
$1mi=8
$1sa=0.900
$1tr=40.1
$yjm=800
$yvm=10500
$ysn=3
$ysx=2
$yjh=800
$ysv=1800
$2mi=8
$2sa=0.900
$2tr=39.96
$zjm=2000
$zvm=3000
$zjh=2000
$zsv=1500
$xfr=8000
$yfr=8000
$zfr=3000
$afr=20000
$3mi=8
$3sa=1.800
$3tr=8.0000
$ajm=600
$avm=20000
$4mi=8
$4sa=0.900
$4tr=160.0000
$mt=300.00
$zzb=2
$3po=1
$zsx=3
$zsn=0
2021-02-03 10:30:37.019 GcodeAsyncDriver DEBUG: serial://COM4 commandQueue.offer(M5, -1)...
2021-02-03 10:30:37.020 GcodeDriver TRACE: [serial://COM4] confirmed $zsn=0
2021-02-03 10:30:37.020 GcodeAsyncDriver DEBUG: serial://COM4 commandQueue.offer(M9, -1)...
2021-02-03 10:30:37.020 GcodeAsyncDriver DEBUG: serial://COM4 commandQueue.offer(G90, -1)...
2021-02-03 10:30:37.020 GcodeAsyncDriver DEBUG: serial://COM4 commandQueue.offer(G28.2 X0 Z0, -1)...
2021-02-03 10:30:37.020 GcodeAsyncDriver$WriterThread TRACE: [serial://COM4] >> M5
2021-02-03 10:30:37.020 GcodeAsyncDriver DEBUG: serial://COM4 commandQueue.offer(G28.2 Y0, -1)...
2021-02-03 10:30:37.021 GcodeAsyncDriver DEBUG: serial://COM4 commandQueue.offer(G28.3 X0 Y0 Z0, -1)...
2021-02-03 10:30:37.021 GcodeAsyncDriver DEBUG: serial://COM4 commandQueue.offer(; G92 commented out replaced by G28.3 G92 X0 Y0 Z0, -1)...
2021-02-03 10:30:37.030 GcodeDriver$ReaderThread TRACE: [serial://COM4] << tinyg [mm] ok>
2021-02-03 10:30:37.030 GcodeDriver TRACE: [serial://COM4] confirmed M5
2021-02-03 10:30:37.031 GcodeAsyncDriver$WriterThread TRACE: [serial://COM4] >> M9
2021-02-03 10:30:37.045 GcodeDriver$ReaderThread TRACE: [serial://COM4] << tinyg [mm] ok>
2021-02-03 10:30:37.046 GcodeDriver TRACE: [serial://COM4] confirmed M9
2021-02-03 10:30:37.046 GcodeAsyncDriver$WriterThread TRACE: [serial://COM4] >> G90
2021-02-03 10:30:37.062 GcodeDriver$ReaderThread TRACE: [serial://COM4] << tinyg [mm] ok>
2021-02-03 10:30:37.062 GcodeDriver TRACE: [serial://COM4] confirmed G90
2021-02-03 10:30:37.062 GcodeAsyncDriver$WriterThread TRACE: [serial://COM4] >> G28.2X0Z0
2021-02-03 10:30:37.077 GcodeDriver$ReaderThread TRACE: [serial://COM4] << tinyg [mm] ok>
2021-02-03 10:30:37.078 GcodeDriver TRACE: [serial://COM4] confirmed G28.2X0Z0
2021-02-03 10:30:37.078 GcodeAsyncDriver$WriterThread TRACE: [serial://COM4] >> G28.2Y0
2021-02-03 10:30:45.717 GcodeDriver$ReaderThread TRACE: [serial://COM4] << tinyg [mm] ok>
2021-02-03 10:30:45.717 GcodeDriver TRACE: [serial://COM4] confirmed G28.2Y0
2021-02-03 10:30:45.717 GcodeAsyncDriver$WriterThread TRACE: [serial://COM4] >> G28.3X0Y0Z0
2021-02-03 10:30:52.036 GcodeDriver$ReaderThread TRACE: [serial://COM4] << tinyg [mm] ok>
2021-02-03 10:30:52.037 GcodeDriver TRACE: [serial://COM4] confirmed G28.3X0Y0Z0
2021-02-03 10:30:52.037 GcodeAsyncDriver$WriterThread TRACE: [serial://COM4] >>
2021-02-03 10:30:52.052 GcodeDriver$ReaderThread TRACE: [serial://COM4] << tinyg [mm] ok>
2021-02-03 10:31:37.023 MessageBoxes DEBUG: Error: java.lang.Exception: Timed out waiting for home to complete.
<serial line-ending-type="LF" port-name="COM4" baud="115200" flow-control="XonXoff" data-bits="Eight" stop-bits="One" parity="None" set-dtr="false" set-rts="false" name="SerialPortCommunications"/>
<tcp line-ending-type="LF" ip-address="127.0.0.1" port="23" name="TcpCommunications"/>
<simulated line-ending-type="LF"/>
<homing-fiducial-location units="Millimeters" x="0.0" y="0.0" z="0.0" rotation="0.0"/>
<detected-firmware><![CDATA[FIRMWARE_NAME:TinyG, FIRMWARE_URL:https%3A//github.com/synthetos/TinyG, FIRMWARE_VERSION:0.97, FIRMWARE_BUILD:440.21, HARDWARE_PLATFORM:1.00, HARDWARE_VERSION:8.00]]></detected-firmware>
<command type="COMMAND_CONFIRM_REGEX">
<text><![CDATA[.*qi:(?!0).*|.*ok>.*|.*r:.*|.*File not open.*]]></text>
</command>
<command type="CONNECT_COMMAND">
<text><![CDATA[$SV=0 ]]></text>
<text><![CDATA[$ex=1]]></text>
<text><![CDATA[$ME]]></text>
<text><![CDATA[$1pm=1]]></text>
<text><![CDATA[$2pm=1]]></text>
<text><![CDATA[$3pm=1]]></text>
<text><![CDATA[$4pm=1]]></text>
<text><![CDATA[$mt=1000000000]]></text>
<text><![CDATA[G21 G90]]></text>
<text><![CDATA[; G92 X0 Y0 Z0 A0 M8 M5 ]]></text>
<text><![CDATA[$xjm=1200]]></text>
<text><![CDATA[$xvm=10500]]></text>
<text><![CDATA[$xsv=2000 ]]></text>
<text><![CDATA[$xsn=3 ]]></text>
<text><![CDATA[$xjh=800]]></text>
<text><![CDATA[$xsx=2 ]]></text>
<text><![CDATA[$1mi=8 ]]></text>
<text><![CDATA[$1sa=0.900]]></text>
<text><![CDATA[$1tr=40.1]]></text>
<text><![CDATA[$yjm=800 ]]></text>
<text><![CDATA[$yvm=10500]]></text>
<text><![CDATA[$ysn=3]]></text>
<text><![CDATA[$ysx=2]]></text>
<text><![CDATA[$yjh=800]]></text>
<text><![CDATA[$ysv=1800]]></text>
<text><![CDATA[$2mi=8 ]]></text>
<text><![CDATA[$2sa=0.900 ]]></text>
<text><![CDATA[$2tr=39.96]]></text>
<text><![CDATA[$zjm=2000]]></text>
<text><![CDATA[$zvm=3000]]></text>
<text><![CDATA[$zjh=2000]]></text>
<text><![CDATA[$zsv=1500]]></text>
<text><![CDATA[$xfr=8000]]></text>
<text><![CDATA[$yfr=8000]]></text>
<text><![CDATA[$zfr=3000 ]]></text>
<text><![CDATA[$afr=20000]]></text>
<text><![CDATA[$3mi=8]]></text>
<text><![CDATA[$3sa=1.800]]></text>
<text><![CDATA[$3tr=8.0000]]></text>
<text><![CDATA[$ajm=600]]></text>
<text><![CDATA[$avm=20000]]></text>
<text><![CDATA[$4mi=8]]></text>
<text><![CDATA[$4sa=0.900]]></text>
<text><![CDATA[$4tr=160.0000]]></text>
<text><![CDATA[$mt=300.00 ]]></text>
<text><![CDATA[$zzb=2]]></text>
<text><![CDATA[$3po=1]]></text>
<text><![CDATA[$zsx=3]]></text>
<text><![CDATA[$zsn=0]]></text>
</command>
<command type="HOME_COMMAND">
<text><![CDATA[M5]]></text>
<text><![CDATA[M9]]></text>
<text><![CDATA[G90]]></text>
<text><![CDATA[G28.2 X0 Z0]]></text>
<text><![CDATA[G28.2 Y0]]></text>
<text><![CDATA[G28.3 X0 Y0 Z0 ]]></text>
<text><![CDATA[; G92 commented out replaced by G28.3 G92 X0 Y0 Z0]]></text>
</command>
<command type="MOVE_TO_COMMAND">
<text><![CDATA[G0 {X:X%.4f} {Y:Y%.4f} {Z:Z%.4f} {Rotation:E%.4f} F{FeedRate:%.0f}]]></text>
</command>
<command type="MOVE_TO_COMPLETE_COMMAND">
<text><![CDATA[M400 ; Wait for moves to complete before returning]]></text>
</command>
<command type="MOVE_TO_COMPLETE_REGEX">
<text><![CDATA[.*stat:(1|3).*]]></text>
</command>
<command type="HOME_COMPLETE_REGEX">
<text><![CDATA[.*momo:4,stat:1.*]]></text>
</command>
<command type="PUMP_ON_COMMAND">
<text><![CDATA[M9]]></text>
<text><![CDATA[M4]]></text>
</command>
<command type="PLACE_COMMAND">
<text><![CDATA[G0 Z-30]]></text>
<text><![CDATA[G38.2 Z-50 F500]]></text>
<text><![CDATA[M9]]></text>
<text><![CDATA[G4 P1]]></text>
<text><![CDATA[G0 Z0]]></text>
</command>
<command type="PICK_COMMAND">
<text><![CDATA[G0 Z-30]]></text>
<text><![CDATA[G38.2 Z-50 F500]]></text>
<text><![CDATA[M8]]></text>
<text><![CDATA[G4 P1]]></text>
<text><![CDATA[G0 Z0]]></text>
</command>
<command head-mountable-id="ACT165ff48d9d14b5f0" type="ACTUATE_BOOLEAN_COMMAND">
<text><![CDATA[{True:M4}{False:M5}]]></text>
</command>
<command head-mountable-id="ACT165ff6175e923fc4" type="ACTUATE_BOOLEAN_COMMAND">
<text><![CDATA[{True:M8}{False:M9}]]></text>
</command>
<command type="GET_POSITION_COMMAND">
<text><![CDATA[M114]]></text>
</command>
<command type="POSITION_REPORT_REGEX">
<text><![CDATA[M114]]></text>
</command>
<command type="SET_GLOBAL_OFFSETS_COMMAND">
<text><![CDATA[G28.3 {X:X%.4f} {Y:Y%.4f} {Z:Z%.4f} {A:A%.4f} ; reset coordinates]]></text>
</command>
<junction-deviation value="0.02" units="Millimeters"/>
</gcode-async-driver>
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/veyVAwqS0do/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/3d1b47d1-2901-4809-9faa-2d60f3e7be29n%40googlegroups.com.
ma...@makr.zone
Assuming you want to go all the way with the newest OpenPnP testing version:
Get rid of the HOME_COMPLETE_REGEX. It is no longer needed when you use the new firmware and the setup suggested by Issues & Solutions.
https://github.com/openpnp/openpnp/wiki/Issues-and-Solutions
It will properly use M400 and/or a position report for coordination. See here for background:
https://github.com/openpnp/openpnp/wiki/Motion-Planner#motion-path-planning
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CAGLOruTxym3eEi51E-UKDMutEo3qaJBpqrLmuKyW9U%3D87mhLBw%40mail.gmail.com.