Multi-Star Guiding

kor....@gmail.com
- Shane

Andy Galasso

Bill McLaughlin

as...@kor.cotse.net
I was at SWAP last week and saw many example of planetary imaging where you could easily see differences in seeing on Jupiter's disk. This seems to indicate that seeing can vary quite a bit in very small regions.
I realize that a multi-star solution will likely not work for all situations--long focal length off-axis guiding may not provide enough decent stars at high enough separations to help.
Anyway, I'm going to get started on this, but don't expect a quick implementation. I've not yet even looked at the PHDv2 code and I'm not a fast coder.
- Shane

ma...@shelleyz.co.uk
as...@kor.cotse.net
Field rotation is something that I have been thinking about a lot. I've got some ideas, but they haven't quite gelled yet. I'll post a possible algorithm for comments in the next couple of weeks.
- Shane

Bruce Waddington
Good luck.
Bruce W.
as...@kor.cotse.net
I understand what you are saying and do not disagree with any of it. The more I look at it, the more cases I find in which it may not be possible or may not be of benefit. But, if it can work, I think it opens up several interesting possibilities.
In my own system, I have a small periodic error and take the time to do a good polar alignment. My guiding is dominated by corrections due to seeing and centroid measurement. I don't _know_ that multi-star will help, but maybe I can find out. Anyway, it's a very interesting idea and I'm already learning many new things. I've got a couple of ideas that reduce the issue mainly to one of image processing and let PHD2 do the heavy lifting--at least as a proof of concept. PHD2 should make a wonderful test platform.
So, wish me luck!
- Shane

Bernd Gooßmann
in my opinion the key benefit of multi-star-guiding for us amateurs (which seems to implemented in the actual MaximDL 6 version - it's a listed new item but I'm not using MaximDL) should be a better S/N for a given exposure time if you stack selected guiding stars together fromout one picture. It should give us a more stable star profile - and this should give us a smoother and more stable tracking behaviour ! I think it's really worth a try!
Bernd
ma...@shelleyz.co.uk
Andy Galasso
ma...@shelleyz.co.uk
Andy Galasso
as...@kor.cotse.net
Hi Mark,
As Andy mentioned, I am currently working on it. I a bit of time reading and thinking and started coding a couple of weeks ago.
As you mentioned before, field rotation does complicate things. The solution that I am implementing uses a polygon centroid to minimize its impact. So far I have not modified any existing code (except adding .h files to phd.h and a changing one line in myframe.cpp to call the new guider. I have added the following three classes:
StarList - based on Star::AutoFind() and builds a list of suitable stars for multi-star guiding
PolyStar - manages a polygon whose vertices are stars
GuiderPolyStar - implements the guider and actually derived from GuiderOneStar rather than the abstract Guider class
RIght now, I can build the star list (but I'm still working on it...) make the polystar and find its centroid, set the lock point, and let the polystar drift as the stars move across the image.
The next step is to figure out how to calibrate. Should it use the PolyStar or just calibrate on a single star. Calibration is also a chance to ensure that no hot pixels got through the star selection and, if necessary, to fix the actual spacial relationships between the stars in the PolyStar.
There is still quite a bit to figure out and a whole lot to do. If you want to work on this with me, that would be fine--we can figure out how to split stuff up and I'll figure out how to make a new branch (help, Andy!!!!) and check some code in. If you have a different idea for an implementation, let me know; I'm pretty sure that the PolyStar will work, but I am not opposed to trying something better. I also don't have a problem with having two different solutions as I suspect that different solutions may work better for different situations.
I also have a friend at work looking into other options for managing rotation. He is much smarter at math and physics than I am ...
- Shane
Andy Galasso
I'll figure out how to make a new branch (help, Andy!!!!) and check some code in.
as...@kor.cotse.net
OK, I'll read up on it. I've got a lot of cleanup to do before I let anyone see this stuff! Maybe some time this weekend...
- Shane
ma...@shelleyz.co.uk
as...@kor.cotse.net
Yea! Tonight I did an <ctl-s> to auto select a group of stars suitable to guide on, formed the PolyStar, calculated the centroid, calibrated, and guided on the PolyStar's centroid!
There is still a lot of work to do:
- Figure out what star selection parameters can be set in stone and which need to be user modifiable.
- Figure out what needs to be on the config panel, what it should look like, and how to do it.
- Figure out what the whole MassChecker thing is all about and how to adapt it to multiple stars.
- Figure out what to do about the "Star Profile" panel. I'd like to keep it as I find it useful for focusing, but I'm not sure how to relate it to the PolyStar.
- Clean up my very ugly C++ code.
- Document, document, document. Code, user guide, probably the wiki also.
- And, of course, test with real hardware. Hopefully I'll get some clear nights soon.
- Probably more that I don't know about yet ...
- Shane

Mark Striebeck
--
You received this message because you are subscribed to the Google Groups "Open PHD Guiding" group.
To unsubscribe from this group and stop receiving emails from it, send an email to open-phd-guidi...@googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
bw_msgboard
Congratulations! But if I may, I’d like to propose that you re-order your list a little. I’d like to see step 7 – proof of concept – moved way up to the top. The most convincing approach would be to run a sequence of alternating guide sessions on the same night – 30 minutes with single-star guiding, 30 minutes on the same FOV with multi-star guiding, then repeat. The question is whether any difference between the two alternatives is statistically significant. If would really be great if the answer was ‘yes’ – but I have my doubts. J Anyway, it’s good to see you have been able to make progress…
Good luck.
Bruce W.
--
as...@kor.cotse.net
We all owe a great deal of thanks to Dr. Stark, Bret, Andy, Bruce, and everyone else who help to make the code robust and extensible. The hardest part (after figuring out what I really wanted to do) was adapting the star autofinder to return a list of stars instead of just the best one. I actually just started on the calibration tonight and after a couple hours of looking the code, added two lines and it calibrated and guided!
- Shane
as...@kor.cotse.net
That is exactly what I intend to do the next time I get a clear night. I suspect that in many cases, there will be no real difference though I really don't think it should be any worse. I also think that, if there is an improvement, it will be so slight that it may not matter unless your guiding is really limited by seeing--you have well managed PE and a great alignment. Still, it's been a lot of fun learning the code and figuring this out. I'm (well, OK, a really smart friend of mine at work who knows a lot more about math and modeling than I do is) also thinking about some other ways to extract data from the group of stars that may lead to better solutions.
- Shane
bw_msgboard
Thanks for taking my suggestion constructively – I was a little concerned you’d think I was just bad-mouthing the project. J I’m definitely not doing that. Looking at what I suggested, I think the test sequences would need to be shorter, maybe more like 10 minutes, in order to get enough samples to support statistical testing. One of the issues your math friend might have is not being aware of the underlying physical processes we’re wrestling with. Many of us – really a lot of us based on the data I’ve seen – routinely get guiding results that are seeing-limited. That probably means RMS guide star displacements of 0.3 to 0.7 arc-sec with guiding enabled. And the seeing limit is really a bit of a “brick wall” for conventional guiding, any place where we’re trying to push 50-100 pounds of gear around. To deal with displacements driven by seeing, we need something like an AO device with sampling rates of at least several hundred/sec. And even then, studies have shown that most of the benefit from amateur-class AO devices comes from moving a small optical element instead of the 50-100 lbs of highly inertial gear. In fact, the issues you mentioned with things like PE and polar mis-alignment are rather easily handled because they are usually (hopefully) characterized by slower, steadier deflections.
You might want to consider doing an experiment that I did just last month. I added some debug code in PHD2 to log the incremental (not cumulative) shifts (frame to frame) in the X/Y position of the guide star. I ran that for about an hour with guide commands disabled. I loaded it all into a spreadsheet and found that “signal” was comprised of 3 low-frequency, predictable elements - Dec drift, RA drift (probably flexure), and PE – underlying higher frequency seeing fluctuations having a substantially higher amplitude. I then enabled guiding and ran for another hour. The RMS of the star deflections was essentially the same with guiding on or off. So the guide algorithms had done a great job of eliminating the cumulative, low-frequency stuff but could do nothing about the seeing errors – I was running at the limit of the seeing. The logging code is in the latest build, so you might want to extend it to record the data for poly-star guiding. That might help you guys see if there was more data to be gotten from the star group algorithm.
Let us know what you find out…
Bruce
ma...@shelleyz.co.uk
as...@kor.cotse.net
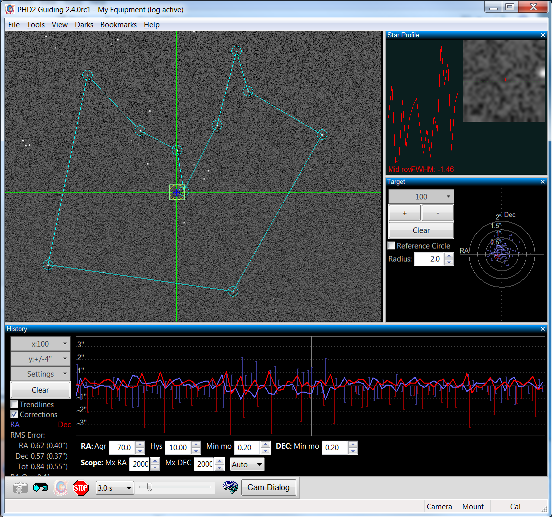
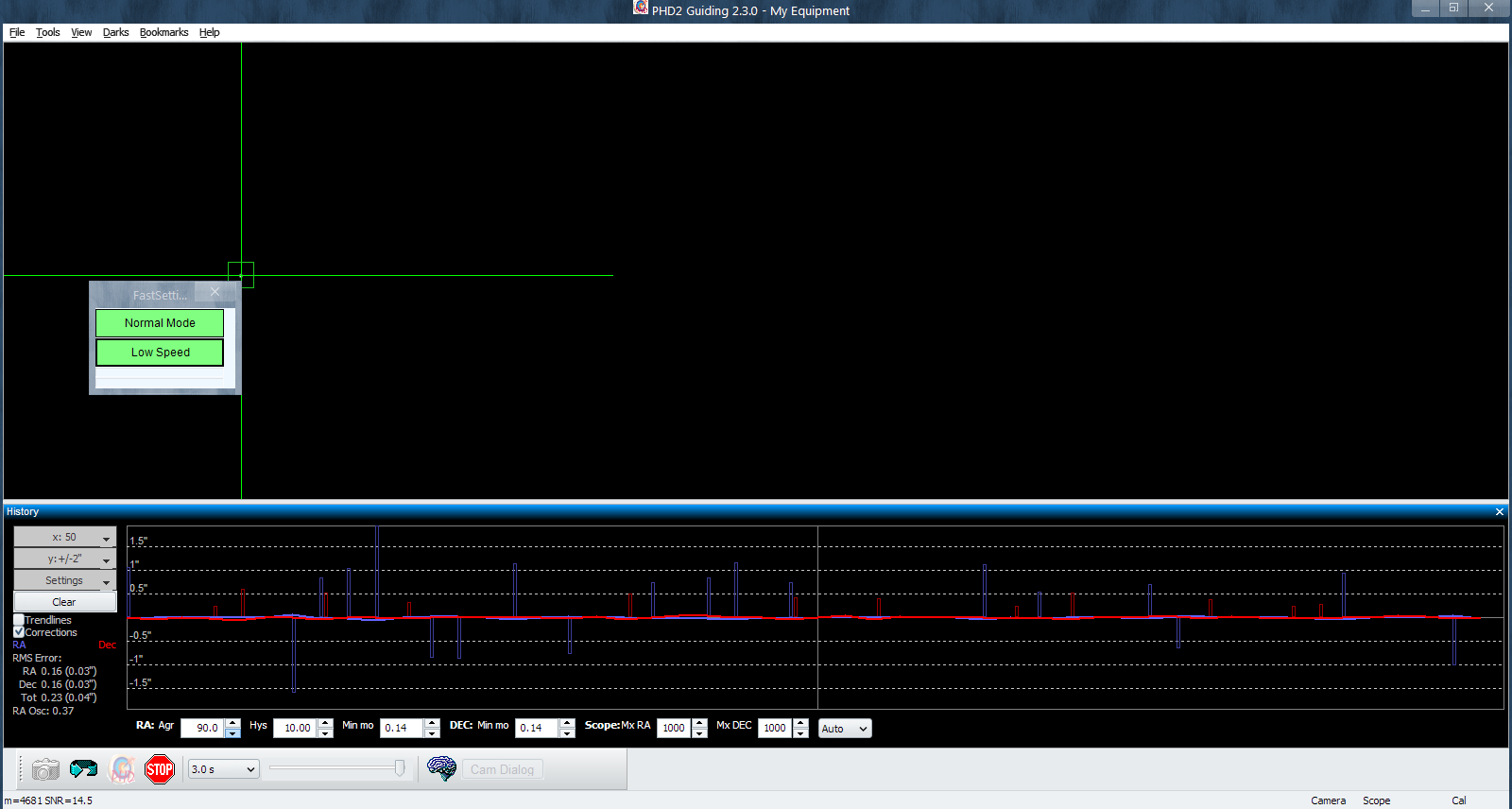
But, I did get one run with a 3-star polygon. I let it go 200 cycles and then started up normal PHD and guided for another 200 cycles on one of the stars that was in the polygon. Here are screenshots from both runs, taken just after the run ended:
<www.kor-astro.net/PolyStar/PHD2-PolyStar-1.png>
<www.kor-astro.net/PolyStar/PHD2-OneStar-1.png>
You can see the differences in the guiding graphs. The RMS errors are also a little different, though much of that is probably due to the initial centering of the lock point after calibration. So, I pulled the guide logs into PHDLab. The guiding logs are available here:
<www.kor-astro.net/PolyStar/PolyStar-GuideLog-1.txt>
<www.kor-astro.net/PolyStar/OneStar-GuideLog-1.txt>
If I tell PHDLab to "Trim start: 10" on each guide log, I get the following:
RA RMS DEC RMS
One Star 0.56 0.53
PolyStar 0.50 0.43
It's not a big difference, but on this run, with only 3 stars in the polygon, it is encouraging.
Finally, I pulled the PolyStarLog file, a CSV file that you can find here:
<www.kor-astro.net/PolyStar/PolyStar-PolyStarLog-1.txt>
into MS Exel and did some graphing, averaging, and standard deviationing. You can get spreadsheet here:
<www.kor-astro.net/PolyStar/PolyStar-Analysis.xlsx>
The big graph shows that the PolyStar Centroid tends to be a little bit inside (less extreme) than the 3 stars' centroids. The smaller graphs show that the PolyStar Centroid scatter plot is a little tighter than the individual stars' plots.
All of this data represents only a single test and should not be considered positive proof of anything! But, if anyone wants to look at it, I'd welcome opinions. Hopefully later this week, I can run some additional tests with polygons containing more stars.
- Shane

Hans
How does the algorithm work when 1 of the guide stars is lost ? The algorithm should be able to continue, just not with the previous PolyStar Centroid.
With a limited number of guide stars N you can maybe calculate all centroids for when up to N-1 are lost ?
-- Hans
as...@kor.cotse.net
It doesn't yet handle loss of any of the stars yet. I'm still in prototype/test to see if the idea even works mode. I _think_ that shifting the guide lock point to the centroid of a different polygon will cause problems due to field rotation (single guide stars don't rotate--multiple guide stars do), but I have not yet explored that fully.
I'm also thinking of various ways to identify and compensate for the movement component due to field rotation. If we can do that, then there are probably better ways than simply guiding on the centroid of the polygon.
There is still lots to do.
- Shane

Duczmal
as...@kor.cotse.net
I did notice the difference but I didn't associate it with the reduced correlation that you point out--Thanks.
The thin triangle in the PolyStar PNG is not exactly the kind of polygon I was hoping for. Once I get the star finder fixed, maybe I'll get a better polygon and we can see a bit more difference.
- Shane

SiriusOmegaBeta
as...@kor.cotse.net
What I've found so far: SNR is king.
- It is better to guide on a single star with SNR 25 than on one with SNR25, one with SNR 18, and 4 more with SNR < 10. Adding bad stars to a good star gives worse guiding.
- If you have multiple high SNR stars within about 10% of each other, multi-star guiding beats out single star. Ex: if you have three stars that are 25, 18, and 10, single star guide on the 25. If you have 5 stars that are 25, 24, 22, 18, 10, and 6, multi-star guide on the 25, 24, and 22.
- If all you can get is bad stars (for example: several that are around SNR 7) you can pick the top 3 or 4 and improve guiding fractionally--though, at least for me, it will still not be good. If this is because of seeing, I don't even bother to image--I'll just end up discarding those subs anyway. If it is because of lack of stars in the general area, I offset the guide scope somewhere that decent stars--this rarely happens.
- All of my testing has been with a QSI5II-L mono in a guidescope. As you pointed out, I do not expect to acquire multiple usable stars in an AOG.
The code currently has auto-star-select capability and runs the standard single star auto-select. It then scans all stars to see if there are more stars at about the same SNR as the auto-selected star. If so, it creates a poly-star with those stars. If not, it falls back to single star guiding and operates as it would have originally.

Bret McKee
--
SiriusOmegaBeta
Bruce Waddington
Bruce
as...@kor.cotse.net
Anyway, the code currently allows you to click stars to add them to the polystar--mainly so I can test out various combinations of stars. For auto star select, it lets you specify the maximum number of stars, min and max SNR, min mass, and a background noise sigma to help it filter noise and hot pixels. Like I said, you can ignore all of that and just click on whatever stars you want in the polygon also.
Guiding is simple. It just calculates the polygon centroid and uses that as the guide point. This will be the mode until I can figure out some way to deal with field rotation. (If ever ....) There is not yet code to deal with a lost star or large mass change, so you'll have to test it on decent nights when yo don't lose your stars. The star profile graph is also not yet useful. I really don't know what to do with it when there are lots of stars to keep track of and no star at the guide point. Right now, it displays the profile of the first star and nothing in the crosshairs. The other graphs, however, work fine as they don't care about stars, just corrections.
Give me a couple of weeks to run another test or two and make sure I can give you a copy that has a chance at working. Note, that it is based on the source trunk as of Nov (v2.4.0 rc1) and does not have a lot of the latest and greatest features. For example, I don't know if it will run with the current SGP betas. It will run with the current release (late 2014).
- Shane
as...@kor.cotse.net
SiriusOmegaBeta
Bruce Waddington
Bruce
Bill McLaughlin
SiriusOmegaBeta
as...@kor.cotse.net
Is there a test framework for the server interface? I tried to guide an image last night with the multi-star code and SGP would not start. It gave an error that the autoguider has been set, but is not guiding. Since it works fine with the normal version, I have obviously not implemented something that I need to. I've gone through the code again and am simply not finding it--I'm probably just missing something obvious. Can someone point me in the right direction and let me know if and how I can test the server without having to actually start an SGP sequence?
Thanks - Shane
Andy Galasso
Mark Striebeck
as...@kor.cotse.net
Here is what I have found so far:
If you have 5 or six stars with similar (<10% difference) SNR, multi-star guiding can reduce your RMS error by about 20% versus guiding on any one of those stars. But, if there is another, single unsaturated star with a higher SNR, guiding on that star will be better than the multi-star solution.
So, to be effective you need the situation where there are several stars with the highest SNR in the field. I don't seem to have that happen very often.
I do plan on learning git and the new build environment so I can update the multi-star code to the current PHD2 version. This will be a bit of work since my current code doesn't interface to the single star guiding framework very well. Improvements to the single-star solution should follow to the multi-star stuff, but the way I've got it coded right now, they mostly don't. Bad design on my part ...
Anyway, I still think multi-star guiding can show an improvement, but I think the conditions necessary to do so are fairly rare. I'll try to get back into development mode soon and see if I can get caught back up.
- Shane
Mark Striebeck
Interesting.
I thought it to be interesting when imaging under not-so optimal conditions where your guide star isn't very stable. If guiding on several stars (so I thought) those effects would be mitigated.
Mark
Attila Mádai
This is almost three-year old topic but I cannot see the final result; maybe this project has been cancelled?
Andy Galasso
Bill McLaughlin
The current plan is to try full-image guiding based on work by Bob Majewski. We do not have a timeline for when that work will be done.

Bryan
Andy Galasso
What I was a bit unclear about is whether this system would potentially work with a standard off-axis system or does it need to be guide scope or on-axis to work well?
bw_msgboard
From:
open-phd...@googlegroups.com [mailto:open-phd...@googlegroups.com] On Behalf Of Bryan
Sent: Monday, September 11, 2017
1:59 PM
To: Open PHD Guiding
Subject: Re: [open-phd-guiding]
Re: Multi-Star Guiding
If you are not interested in also implementing the Zero-Drift method, which is a separate tool, then you can use whatever you are using now. You would just replace the centroid tracking method that PHD2 and other guide packages use with the image autoguiding algorithm. I suspect that PHD2 Team would just add in another algorithm in the dropdown box, somewhat like PPEC. Behind the scenes, however, it is much more complex, because the approach and associated data needed is very different.
Offhand, I don’t think we’d treat this as an alternative guiding algorithm. It’s really an alternative to the centroid algorithm for locating the guide star position, so it’s another way of measuring how far the image has moved from one exposure to the next. Once that’s known, all the usual guiding algorithm features still need to be available. We haven’t really talked yet about the UI implications, but yes, it’s a substantial amount of work.
Bruce
Note that Bob Majewski admits that is a lot of work to be done just on the base methodology. He is looking for beta testers. At the time of the video (Mar 2017), the system worked only on Macs and only with SBIG camera, because that is what he uses.
This is NOT a trivial addition for PHD2!!
Bryan
On Monday, September 11, 2017 at 1:57:34 PM UTC-6, Bill McLaughlin wrote:
The current plan is to try full-image guiding based on work by Bob Majewski. We do not have a timeline for when that work will be done.
I had a look at that video on full image guiding. It looks promising. I was a bit unclear on whether he was using his main camera or a guide camera.
Of course his application was not aesthetic imaging so his requirements were very different from most so that probably affected his approach.
What I was a bit unclear about is whether this system would potentially work with a standard off-axis system or does it need to be guide scope or on-axis to work well?
--
Bryan

{kind=link}
{kind=link}
Brian Valente
I purchased the ONAG a few months back.
As you’ve pointed out, it’s promising, but I have yet to implement it. It takes quite a bit of time and fiddling to get it functional
Among the challenges:
You need a really good guiding camera that can be heavily binned. I ended up getting an ASI1600M and binned it 4x. you end up guiding in infrared, so the amount of light available is much less than usual.
You need fairly precise backfocus calibration between the imaging camera and the guide camera. It’s not difficult, but it is time consuming and challenging.
You also have to account for filter offsets. I haven’t yet done this and the approach is not entirely clear to me yet
Gaston was great in answering my questions and generally being available.
I am hopeful but not there yet. It’s funny because this topic came up just as I’m getting back in to seriously integrating this into my imaging system
Thanks
Brian
Brian Valente
Brianvalentephotography.com
From: open-phd...@googlegroups.com [mailto:open-phd...@googlegroups.com] On Behalf Of Bryan
Sent: Monday, October 2, 2017 9:44 AM
To: Open PHD Guiding <open-phd...@googlegroups.com>
Subject: Re: [open-phd-guiding] Re: Multi-Star Guiding
FYI to all
--
Andy Galasso
Brian Valente
Thanks
Brian
Brian Valente
Brianvalentephotography.com
From: open-phd...@googlegroups.com [mailto:open-phd...@googlegroups.com] On Behalf Of Andy Galasso
Sent: Monday, October 2, 2017 2:25 PM
To: Open PHD Guiding <open-phd...@googlegroups.com>
Subject: Re: [open-phd-guiding] Re: Multi-Star Guiding
Hi Bryan,
--