Battery power management lure/module
188 views
Skip to first unread message

Andrey
Aug 7, 2013, 11:31:13 AM8/7/13
to minno...@googlegroups.com
Hi Folks,
I am currently in the very early design phase of the next generation of our open-source robot (http://veterobot.org). Because of performance requirements for image processing algorithms and wish to use OpenCV we are considering MinnowBoard as onboard computer.
One of the typical building blocks required is the power management module which can supply power for motors and electronics out of batteries and perform some other related tasks (battery state monitoring, startup/shutdown sequence, emergency power off, etc.). Since I am a software developer, my abilities to design such module are rather limited ;-) . That is why, I would like to ask the community here if there are any ongoing activities to build battery power supply lure or separate module for MinnowBoard? If not, are there anybody with enough hardware experience wiling to cooperate to build such module? I will be glad to provide the set of requirements to start the discussion and contribute to the corresponding software part.
I will appreciate any thoughts or relevant references.
Thank you,
Andrey.
I am currently in the very early design phase of the next generation of our open-source robot (http://veterobot.org). Because of performance requirements for image processing algorithms and wish to use OpenCV we are considering MinnowBoard as onboard computer.
One of the typical building blocks required is the power management module which can supply power for motors and electronics out of batteries and perform some other related tasks (battery state monitoring, startup/shutdown sequence, emergency power off, etc.). Since I am a software developer, my abilities to design such module are rather limited ;-) . That is why, I would like to ask the community here if there are any ongoing activities to build battery power supply lure or separate module for MinnowBoard? If not, are there anybody with enough hardware experience wiling to cooperate to build such module? I will be glad to provide the set of requirements to start the discussion and contribute to the corresponding software part.
I will appreciate any thoughts or relevant references.
Thank you,
Andrey.

David Anders
Aug 9, 2013, 2:45:26 PM8/9/13
to minno...@googlegroups.com
Andrey,
we are currently taking suggestions for lures to be designed. feel free to post your requirements and we can have a look to see about how feasible it will be to create one for you.
Dave
we are currently taking suggestions for lures to be designed. feel free to post your requirements and we can have a look to see about how feasible it will be to create one for you.
Dave
Andrey Nechypurenko
Aug 10, 2013, 6:33:10 AM8/10/13
to minno...@googlegroups.com
Hi Dave,
> we are currently taking suggestions for lures to be designed. feel free to
> post your requirements and we can have a look to see about how feasible it
> will be to create one for you.
Great! So, just to define the context, please take a look at the
following PSU [1] . There are some good points to motivate the need
for such PSU. However, there are a lot of things missing in this board
for robotics and control applications. The following is the list of
functionality I would need for my concrete project. I think, that this
list is general enough to be useful for a lot of similar projects.
Sorry in advance for rather long email. I was trying to be as brief as
possible ;-) .
I am going to build the vehicle (ground maybe air later on) which will
have 4 DC motors, several servos, have minnowboard (MB) as it's brain
with WLan/LTE usb stick and different usb cameras connected (Xtion,
plain webcam, or something else depending on concrete usage scenario).
Different other sensors might be connected over I2C/SPI/Serial
interface available on MB. It would be the next generation of what we
currently have at http://veterobot.org . So what is in general
necessary is something like Trainer lure [2] with power/battery
management capabilities.
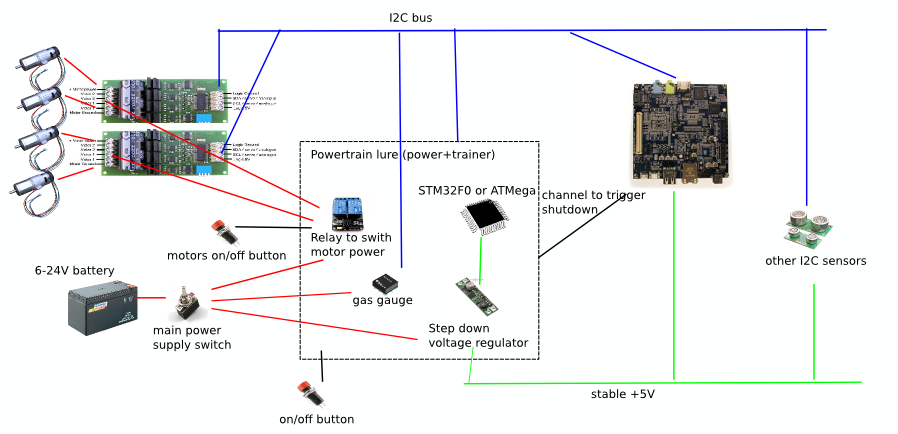
We need to power up to 4 12V/5A DC and several 5V servo motors. In
addition, stable 5V is required for MB and other electronics (sensors,
micro-controller (MC), etc) shielded from motors noise.
It is very typical in robotics applications to use some types of motor
control boards. They are typically controlled with PWMs or over I2C or
serial interface. There are enough reasons to stick with I2C as the
main low-speed communication bus for hobby projects. That is why I am
using [3] and maybe [4]. So there should be the way to provide
required power input (for motors and electronics) from the PSU.
It is very useful during development to be able to cut the motor power
while keeping the control board electronic powered (for the case of
bugs in control algorithm where motors starts doing crazy things :-)
). So corresponding physical switch is necessary.
There is a need to monitor the battery charging level. So some kind of
gas-gauge with I2C interface is required.
As described in [1], the micro-controller is probably required to
drive shutdown sequence. It would be also nice to have the possibility
to shut down everything but the MC itself. For example, for the kind
of remote activation scenarios where MC can monitor some kind of input
to start up the MB.
In addition, the MC should be able to stop the motors to implement
fail-safety measurements. The main scenario here is if the main
control application running on MB is crashed, the MC should
immediately stop motors. One possible way to implement it would be to
connect MC, MB and motor control board over the same I2C bus. In this
case the MC could receive a heart-beat signals from MB and stop the
motors by sending corresponding command to control boards over I2C. I
am not sure if just cutting the motor power off with relay would be
the better solution though.
For the space-constrained applications I think it would be good to
package everything as a lure.
Also, there should be a way (connector) to conveniently plug external
battery charger. In addition, for development, it should be possible
to connect external power supply module to drive everything from the
wall socket.
These considerations are visualized on the attached picture.
I think this information should be enough to start discussion. I would
be glad to provide additional thoughts and answer the questions if
necessary. I would also appreciate general comments whether described
approach makes sense and if there are better ways to implement the
functionality mentioned above.
[1] RPi PSU: http://hackaday.com/2013/05/19/atx-raspi-is-a-smart-power-source-for-raspberry-pi/
[2] Trainer lure: http://www.elinux.org/Minnowboard:Trainer_Lure
[3] MD22 motor control board:
http://www.robot-electronics.co.uk/htm/md22tech.htm
[4] Brushless motor controller: http://www.mikrokopter.de/ucwiki/en/BL-Ctrl_2.0
Thank you very much,
Andrey.
> we are currently taking suggestions for lures to be designed. feel free to
> post your requirements and we can have a look to see about how feasible it
> will be to create one for you.
following PSU [1] . There are some good points to motivate the need
for such PSU. However, there are a lot of things missing in this board
for robotics and control applications. The following is the list of
functionality I would need for my concrete project. I think, that this
list is general enough to be useful for a lot of similar projects.
Sorry in advance for rather long email. I was trying to be as brief as
possible ;-) .
I am going to build the vehicle (ground maybe air later on) which will
have 4 DC motors, several servos, have minnowboard (MB) as it's brain
with WLan/LTE usb stick and different usb cameras connected (Xtion,
plain webcam, or something else depending on concrete usage scenario).
Different other sensors might be connected over I2C/SPI/Serial
interface available on MB. It would be the next generation of what we
currently have at http://veterobot.org . So what is in general
necessary is something like Trainer lure [2] with power/battery
management capabilities.
We need to power up to 4 12V/5A DC and several 5V servo motors. In
addition, stable 5V is required for MB and other electronics (sensors,
micro-controller (MC), etc) shielded from motors noise.
It is very typical in robotics applications to use some types of motor
control boards. They are typically controlled with PWMs or over I2C or
serial interface. There are enough reasons to stick with I2C as the
main low-speed communication bus for hobby projects. That is why I am
using [3] and maybe [4]. So there should be the way to provide
required power input (for motors and electronics) from the PSU.
It is very useful during development to be able to cut the motor power
while keeping the control board electronic powered (for the case of
bugs in control algorithm where motors starts doing crazy things :-)
). So corresponding physical switch is necessary.
There is a need to monitor the battery charging level. So some kind of
gas-gauge with I2C interface is required.
As described in [1], the micro-controller is probably required to
drive shutdown sequence. It would be also nice to have the possibility
to shut down everything but the MC itself. For example, for the kind
of remote activation scenarios where MC can monitor some kind of input
to start up the MB.
In addition, the MC should be able to stop the motors to implement
fail-safety measurements. The main scenario here is if the main
control application running on MB is crashed, the MC should
immediately stop motors. One possible way to implement it would be to
connect MC, MB and motor control board over the same I2C bus. In this
case the MC could receive a heart-beat signals from MB and stop the
motors by sending corresponding command to control boards over I2C. I
am not sure if just cutting the motor power off with relay would be
the better solution though.
For the space-constrained applications I think it would be good to
package everything as a lure.
Also, there should be a way (connector) to conveniently plug external
battery charger. In addition, for development, it should be possible
to connect external power supply module to drive everything from the
wall socket.
These considerations are visualized on the attached picture.
I think this information should be enough to start discussion. I would
be glad to provide additional thoughts and answer the questions if
necessary. I would also appreciate general comments whether described
approach makes sense and if there are better ways to implement the
functionality mentioned above.
[1] RPi PSU: http://hackaday.com/2013/05/19/atx-raspi-is-a-smart-power-source-for-raspberry-pi/
[2] Trainer lure: http://www.elinux.org/Minnowboard:Trainer_Lure
[3] MD22 motor control board:
http://www.robot-electronics.co.uk/htm/md22tech.htm
[4] Brushless motor controller: http://www.mikrokopter.de/ucwiki/en/BL-Ctrl_2.0
Thank you very much,
Andrey.
{kind=link}
Andrey Nechypurenko
Aug 10, 2013, 12:02:09 PM8/10/13
to minno...@googlegroups.com
> We need to power up to 4 12V/5A DC and several 5V servo motors. In
> addition, stable 5V is required for MB and other electronics (sensors,
> micro-controller (MC), etc) shielded from motors noise.
Forget to say, that because of rather high current possible, it makes
> addition, stable 5V is required for MB and other electronics (sensors,
> micro-controller (MC), etc) shielded from motors noise.
sense to add fuses for motors.
And just for fun - this is where I am now with all this staff :-)
https://docs.google.com/file/d/0BzV4szKbuvKwVkpYdTJxc0JIRVU/edit?usp=sharing
I hope I would not be banned from the list because of posting the
picture of RPi here :-)
Thanks,
Andrey.
Reply all
Reply to author
Forward
0 new messages