New product: RasPILOT Pro - Pixhawk functionality brought to Linux - developers wanted
1,537 views
Skip to first unread message

Auvidea
Oct 13, 2015, 12:14:17 PM10/13/15
to drones-discuss
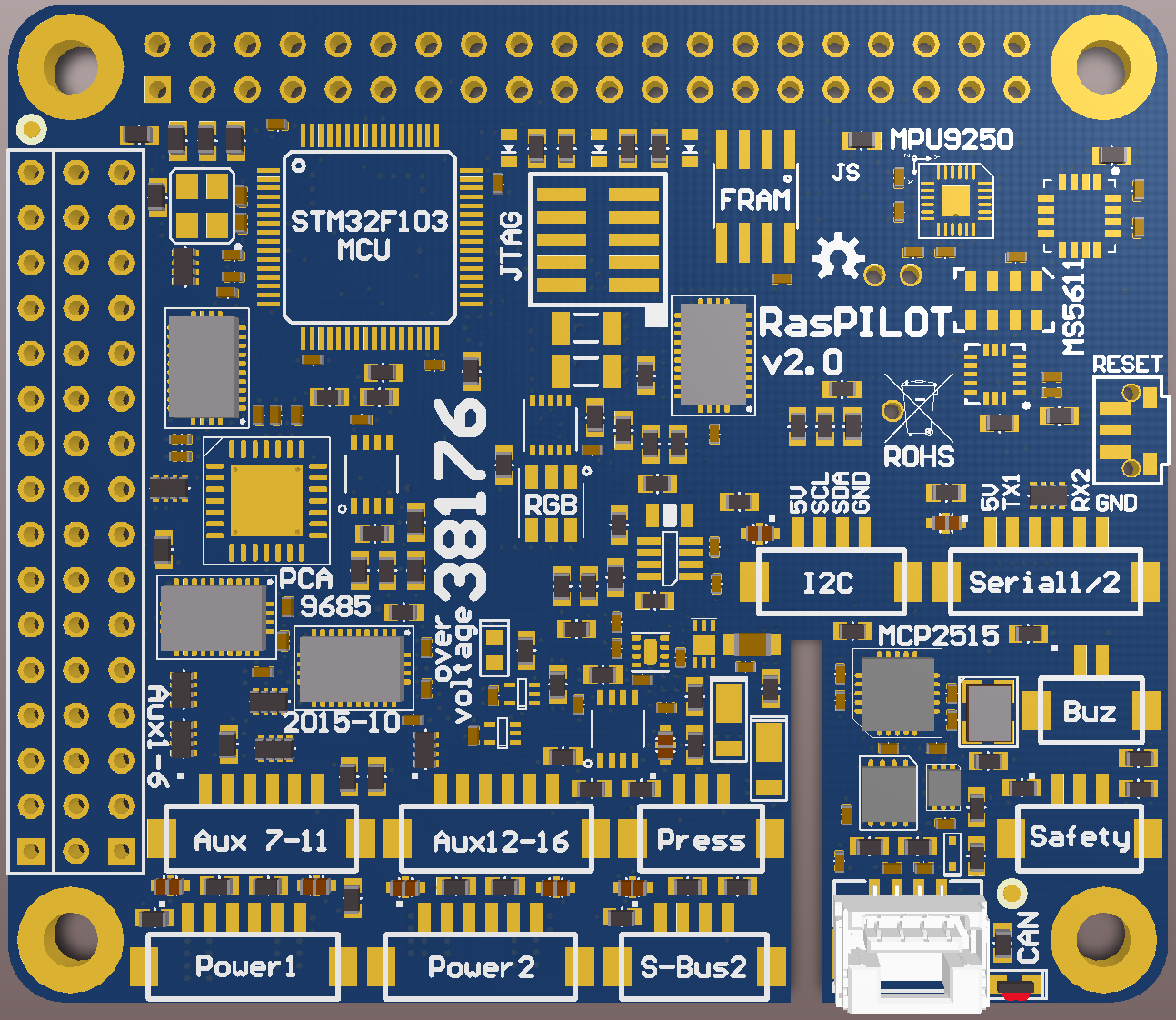
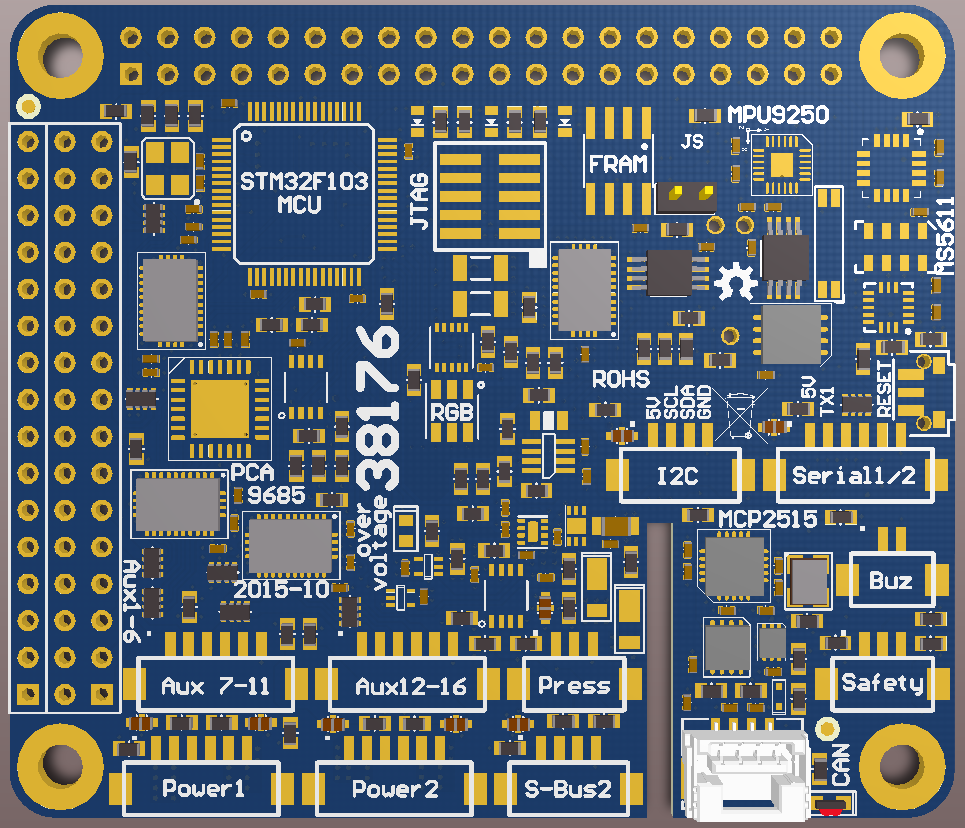
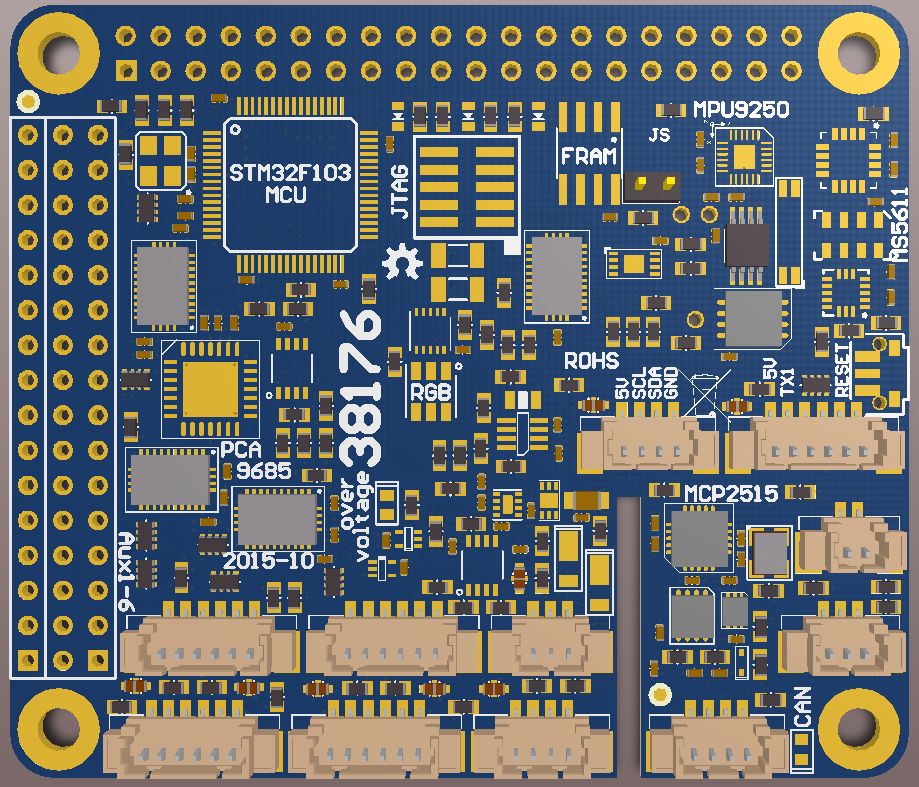
The RasPILOT Pro is the 2nd generation RasPILOT, which integrates the most of the Pixhawk functionality and makes it available to a Linux system.
This product is aimed at developing commercial applications and is the first Raspberry Pi HAT with CAN.
Please give us your feedback and suggestions.
Please give us your feedback and suggestions.
Key features:
- hat module for the Raspberry Pi or compatible systems with 40 pin GPIO connector
- 24 PWM channels in total
- dual battery for fault tolerance
- CAN bus transceiver
- integrated IMU (9 axis plus barometer)
- open hardware project
Specification:
- the 16 ports on the left are equal to the Pixhawk
- 8 PWM channels out of the STM32F103
- PPM input
- S.BUS In
- 6 AUX channels (via PCA9685 controed via I2C by Raspberry Pi)
- 10 extra AUX channels (via PCA9685)
- high drive (SN74LVC8T245) on all 24 PWM channels
- buzzer and safety connector
- I2C and serial 1/2 connector
- ADC 6.6V (pressure)
- 2nd S.BUS input and output (this may be converted to 3rd serial port - by software configuration)
- 2 power connectors (up to 5.5V each) to monitor 2 battery packs with current and voltage (ADC 3.3V)
- overvoltage protection up to 28V (on power 1 and 2)
- CAN controller and transceiver (MCP2515 connected to RPi via SPI bus)
- UAVCAN Clik-Mate CAN connector
- Made in Germany
Physical:
- size: 65 x 56 mm
- triple power (5V): power 1 and 2 and micro USB via the RPi
- 4 mount holes (M3)
Status:
- layout and design finished
- in design review now - a good time to get last changes in
- will go to PCB making next week
- first prototypes for key developers in late November 2015

Vladimir Ermakov
Oct 13, 2015, 1:00:13 PM10/13/15
to drones-discuss
Hello,
Nice project. I only seen schematic for 1.1, so maybe some of suggestions are fixed.
Three feature that i think required for raspberry:
1. RTC + Battery chip. Very handy.
2. Pi HAT ID chip (EERPOM on secondary I2C) - for storing device tree and discovery.
3. Powering computer via 40-pin header, official rpi wiki propose some schematic (two transistors), but for that task APM/Pixhawk power module is not to powerful.
вторник, 13 октября 2015 г., 19:14:17 UTC+3 пользователь Auvidea написал:
Nice project. I only seen schematic for 1.1, so maybe some of suggestions are fixed.
Three feature that i think required for raspberry:
1. RTC + Battery chip. Very handy.
2. Pi HAT ID chip (EERPOM on secondary I2C) - for storing device tree and discovery.
3. Powering computer via 40-pin header, official rpi wiki propose some schematic (two transistors), but for that task APM/Pixhawk power module is not to powerful.
вторник, 13 октября 2015 г., 19:14:17 UTC+3 пользователь Auvidea написал:

Luis Vale Gonçalves
Oct 13, 2015, 1:20:35 PM10/13/15
to drones-discuss
Hi
I would like to point you to this recent message about the ClickMate connectors. Might be better to look ahead and go with MikroLok, or whatever the name is :)
Auvidea
Oct 13, 2015, 3:54:11 PM10/13/15
to drones-discuss
Hi Vladimir,
the board is already pretty densely packed, so there is not much space left for extra logic.
1. why would you like to have an RTC with battery on this board? Is there a specific use of an RTC in auto pilot applications? Do you have a preference for a specific RTC chip? It needs to be a small chip and a very tiny battery.
2. are you looking for a 256 byte EEPROM? Currently the design has the FM25V01 FRAM chip (16kByte with SPI interface to the RPi). Would this be ok? It is the same chip, which already has been on the RasPILOT v1.1.
3. if 5V power is applied to power 1 or 2 (or both) then this 5V power is connected to the 5V pin on the 40 pin RPi header, to power the RPi. This requires of course that the power source is strong enough. I have a dual PDB in design which features two 5V power converters with 3.5A each.
Hi Luis,
thank you for this hint. I have seen this today too. I have designed in the Clik-Mate connector, as this is the connector which Pavel recommends to be used for UAVCAN. I do have a couple of small CAN boards in development which all use the Clik-Mate connector. So I am a little hesitant, to switch to a different connector now. Maybe Pavel could comment on this.
Regards,
Jurgen
Vladimir Ermakov
Oct 13, 2015, 4:24:05 PM10/13/15
to drones-...@googlegroups.com
Hello,
1. Now i has configuration where i got clock data from flight control unit (pixhawk), which is GPS time + some delay.https://github.com/raspberrypi/hats/blob/master/eeprom-circuit.png
--
You received this message because you are subscribed to a topic in the Google Groups "drones-discuss" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/drones-discuss/a6sZefLe-ds/unsubscribe.
To unsubscribe from this group and all its topics, send an email to drones-discus...@googlegroups.com.
For more options, visit https://groups.google.com/d/optout.

Zhang Kaiqi
Oct 13, 2015, 9:29:43 PM10/13/15
to drones-discuss
Hi,
I'm the author of RasPilot. I'm not doing anything about "RasPILOT Pro".
You're free to make a modification, but it's not proper to use the name "RasPilot".

jerry giant
Oct 13, 2015, 9:29:51 PM10/13/15
to drones-discuss
This work has no affliction with Raspilot.io, so please re-consider your naming, it would be confusing.
On Wednesday, October 14, 2015 at 12:14:17 AM UTC+8, Auvidea wrote:

Gary McCray
Oct 13, 2015, 10:37:03 PM10/13/15
to drones-discuss
Hi Auvidea, Zhang and Jerry,
It seems you are both using the name Raspilot to refer to 2 different softwares.
Reasonably you should determine who has the earliest use of that name for publicly describing your software and then the one who is later should choose some other name.
Many lawsuits are fought over this sort of thing, but it would be much better for all concerned if you could arrive at an agreed and reasonable solution.
And varying capitalization and adding PRO do not change the central trademark or copyright conflict.
Best Regards,
Gary McCray

Dave Skipper
Oct 14, 2015, 12:39:11 AM10/14/15
to drones-discuss
Hi Gary, Alex and Jerry,
I have worked with Jurgen on the redesign, not a problem to change the name.

Marco Robustini
Oct 14, 2015, 5:53:09 AM10/14/15
to drones-discuss
Awesome! Where's the "i like it so much" button here? ;-)
Marco
Marco

john...@gmail.com
Oct 14, 2015, 6:54:33 AM10/14/15
to drones-discuss
Just call it PiLOT, with all capital except fro the 'i' to reference the Pi relation.
Auvidea
Oct 14, 2015, 8:33:25 PM10/14/15
to drones-discuss
Let's have a vote on the name. One proposal is RoboPILOT. What do you think?
A big excuse to the RasPILOT team. I did not intent to step on anybody's toes. This project is intended to take the RasPILOT v1.1 design a step further.
Thank you Vladimir for your inputs. I have incorporated those. So I have added the following features:
- RTC (real time clock) - PCF8523 (this chip is used on the HummingBoard, so I already use it in a different project - the H100)
- I2C temperature sensor - LM75A
- 256 byte EEPROM (write protected) - 24LC024
All these are connected to the I2C bus of the Raspberry Pi.
The board is now very full. I would like to keep it a design with just components on top. The only one on the back is the battery holder for the Lithium battery of the RTC. And this is optional.
Regards,
Jurgen
Vladimir Ermakov
Oct 15, 2015, 6:03:26 AM10/15/15
to drones-...@googlegroups.com
One bad thing about «PiLOT» - try to google it.
2015-10-15 10:25 GMT+03:00 Auvidea <j...@auvidea.com>:
John, that is a great idea. Very simple. I really like when things are simple. Let's go for it. Thank you.
--

Kristian Klausen
Oct 15, 2015, 6:43:05 AM10/15/15
to drones-discuss
Hi,
Just checking here: You write that the eeprom is connected to the same i2c bus as the components? To register this as a proper HAT, the eeprom needs to be connected to it's designated ID pins; see https://github.com/raspberrypi/hats
Just checking here: You write that the eeprom is connected to the same i2c bus as the components? To register this as a proper HAT, the eeprom needs to be connected to it's designated ID pins; see https://github.com/raspberrypi/hats
Kristian Klausen
Oct 15, 2015, 6:56:26 AM10/15/15
to drones-discuss
Hi,
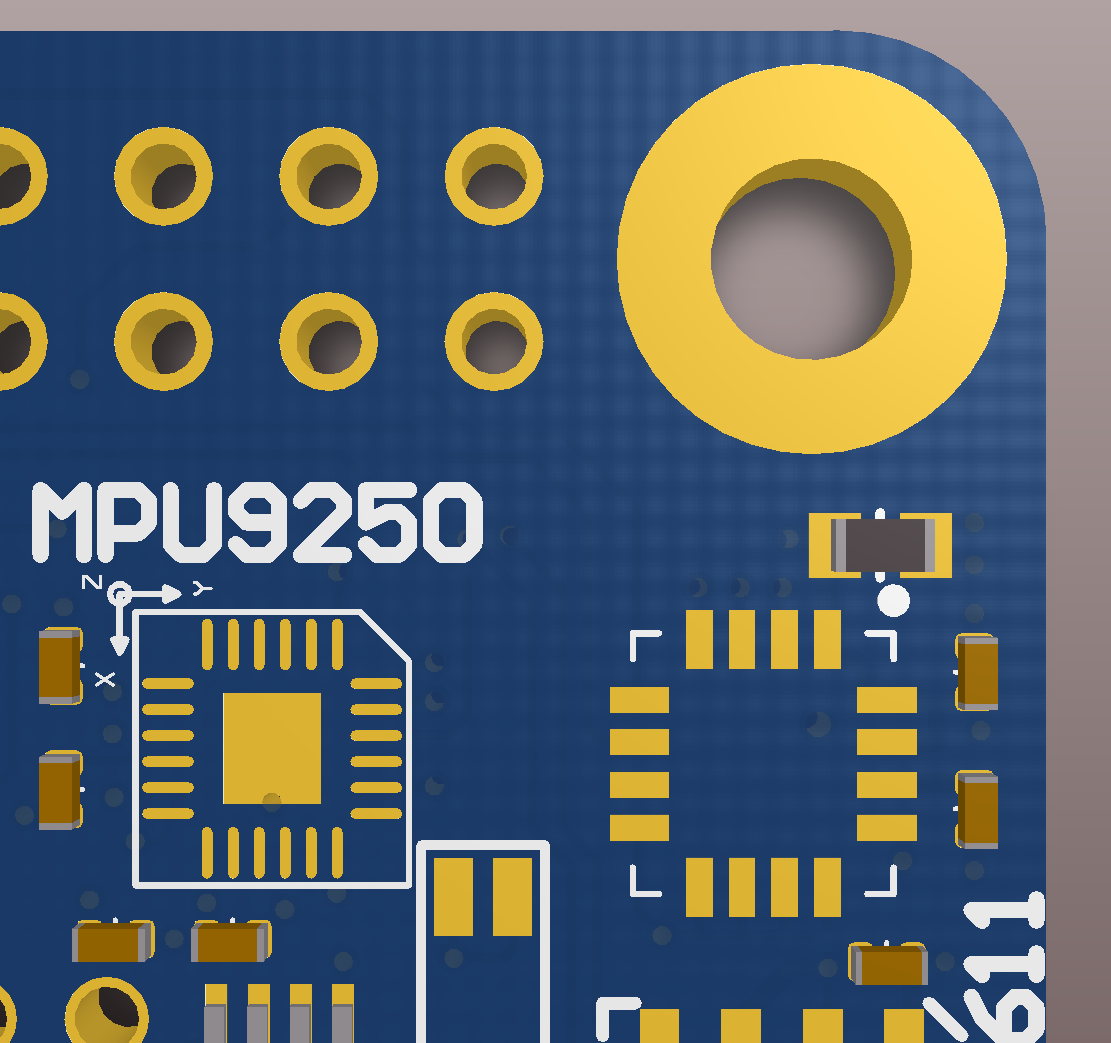
And, is the orientation of the MPU9250 the same as on the other Linux-addons, like the Navio? (just seems a bit counter-intuitive to me to have y pointing forward)
Kristian
And, is the orientation of the MPU9250 the same as on the other Linux-addons, like the Navio? (just seems a bit counter-intuitive to me to have y pointing forward)
Kristian
john...@gmail.com
Oct 15, 2015, 7:21:44 AM10/15/15
to drones-discuss
And I just realized there was something familiar about your company name. I just got the replacement E10 together with the Panasonic GP-MH322 block camera in return a couple of days ago at my office. It is a small world indeed.

Philip Rowse
Oct 15, 2015, 8:26:28 AM10/15/15
to drones-...@googlegroups.com
Good point!
◤PHILIP ROWSE
LEAD SYSTEMS ENGINEER
3D Robotics
--
You received this message because you are subscribed to the Google Groups "drones-discuss" group.
To unsubscribe from this group and stop receiving emails from it, send an email to drones-discus...@googlegroups.com.
Auvidea
Oct 15, 2015, 10:19:45 AM10/15/15
to drones-discuss
Thank you Kristian for pointing that out. I have modified the design accordingly.
- 4kByte EEPROM (CAT24C32HU4I-GT3) with 3.9k pull resistors on ID_SC and ID_SD
I have kept the orientation of the MPU9250 the same as in the RasPILOT v1.1. Please see the detailed picture. I have looked at the Navio+ but I cannot tell which direction their MPU8250 is pointing. Maybe there is somebody with a Navio+, how could help.
Dave Skipper
Oct 15, 2015, 1:07:44 PM10/15/15
to drones-discuss
I think the CAN connector should be DF13 like the pixhawk rather than Clik-Mate, I have a Zubax GPS and it was impossible to buy a ready made Clik-Mate cable.
The Clik-Mate cable that came with the GPS was not well made and the wires broke off easily. A very good GPS but poor wiring for the Clik-Mate connector. Managed to get crimpers from japan eventually.
Anyone have any thoughts on this.
Philip Rowse
Oct 15, 2015, 5:06:01 PM10/15/15
to drones-...@googlegroups.com
All of our can devices across the board are click mate. Please stick to that standard.
Dave Skipper
Oct 15, 2015, 7:59:12 PM10/15/15
to drones-discuss
I thought the Clik-Mate Connector might be replaced;
https://groups.google.com/d/msg/px4users/MJXGxKVT7Ko/Wu95tQz5DQAJ
If the PiLOT had same connector as Pixhawk then i can swop over my existing setup, Zubax Click Mate to Pixhawk DF13, if the PiLOT uses the Clik-Mate then i will have to make a new cable. Currently there are no ready made cables.
I found that using DF13 with a normal GPS was good in a crash, I fitted my GPS to a Pole and 3d printed Holder, it will shear off in a crash using a good double sided tape, the connectors pull free and do not break the wires.
I have a Lidar Lite that uses a Clik-Mate Connector but that is not CAN.
https://groups.google.com/d/msg/px4users/MJXGxKVT7Ko/Wu95tQz5DQAJ
If the PiLOT had same connector as Pixhawk then i can swop over my existing setup, Zubax Click Mate to Pixhawk DF13, if the PiLOT uses the Clik-Mate then i will have to make a new cable. Currently there are no ready made cables.
I found that using DF13 with a normal GPS was good in a crash, I fitted my GPS to a Pole and 3d printed Holder, it will shear off in a crash using a good double sided tape, the connectors pull free and do not break the wires.
I have a Lidar Lite that uses a Clik-Mate Connector but that is not CAN.
Philip Rowse
Oct 15, 2015, 8:07:25 PM10/15/15
to drones-...@googlegroups.com
Pixhawk 2 release is in progress, it has Clickmate. Clickmate was decided upon by this discussion group, and the DIYDrones community. we standardised on that, and would encourage no one to use DF13...
◤PHILIP ROWSE
LEAD SYSTEMS ENGINEER
Message has been deleted

Randy Mackay
Oct 15, 2015, 9:59:35 PM10/15/15
to drones-...@googlegroups.com
My personal opinion is that you’d also be fine sticking with the DF13 because a lot of boards and GPSs out there already use that.
-Randy

Andrew Tridgell
Oct 19, 2015, 3:33:11 AM10/19/15
to Auvidea, drones-discuss
Hi Jurgen,
> - RTC (real time clock) - PCF8523 (this chip is used on the HummingBoard,
> so I already use it in a different project - the H100)
It would certainly be nice to have a RTC. How will you power it? How
long will the power source last?
> - I2C temperature sensor - LM75A
why is it useful to have another temperature sensor? Every IMU, baro and
compass has a temperature sensor already inside. I think there is a
limit to how many of these we need :-)
> - 256 byte EEPROM (write protected) - 24LC024
what are you thinking of using that for?
> The only one on the back is the battery holder for the Lithium battery
> of the RTC. And this is optional.
ahh, ok, question answered!
Cheers, Tridge
> - RTC (real time clock) - PCF8523 (this chip is used on the HummingBoard,
> so I already use it in a different project - the H100)
long will the power source last?
> - I2C temperature sensor - LM75A
compass has a temperature sensor already inside. I think there is a
limit to how many of these we need :-)
> - 256 byte EEPROM (write protected) - 24LC024
> The only one on the back is the battery holder for the Lithium battery
> of the RTC. And this is optional.
Cheers, Tridge
Auvidea
Oct 19, 2015, 1:19:39 PM10/19/15
to drones-discuss, j...@auvidea.com
Hi Randy, hi Tridge,
thank you for your inputs. To start with, I have decided to use the Molex PicoBlade (DF13 compatible) for the CAN connector, as this is a standard connector with easy access to cables.
The I2C temp sensor is optional. It will not be stuffed.
The 256 byte EEPROM already got replaced by the 4k ID EEPROM.
RTC: I do not know, how long the battery will last. I guess, it should be tested once the prototypes have been build.
Regards,
Jurgen

pritam....@gmail.com
Dec 7, 2015, 4:13:15 AM12/7/15
to drones-discuss
Where are the design files? I and Jerry from raspilot wanted to have a look if we can pick up aux ports logic from this board. We need that on raspilot also.
--
You received this message because you are subscribed to the Google Groups "drones-discuss" group.
To unsubscribe from this group and stop receiving emails from it, send an email to drones-discus...@googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
Regards,
pritam
Alex Wright
Jan 12, 2016, 7:36:06 PM1/12/16
to drones-discuss
I would be interested in this board myself. Are there any plans on making this compatible with the odroid c1 or odroid xu4 plus shifter shield?

Brad
Feb 12, 2016, 9:55:21 PM2/12/16
to drones-discuss
Did this project get built? I would like to get one if there are any built. At a minimum, I would like to see the schematics to see how it might work for our project.
Thank you,
Brad
Ricardo 曹嘉誠 IACT Tsao
Apr 21, 2016, 2:29:57 PM4/21/16
to drones-discuss
hi :
great job!! and where to buy one?
thank you!
Auvidea於 2015年10月14日星期三 UTC+8上午12時14分17秒寫道:
Auvidea於 2015年10月14日星期三 UTC+8上午12時14分17秒寫道:

drone...@gmail.com
May 27, 2016, 9:51:16 AM5/27/16
to drones-discuss
I would be interested joining this board. I also work in this and would like to share a possible resource for about drones www.dronespree.com

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Joan R
Jun 26, 2016, 12:00:56 AM6/26/16
to drones-discuss
H.
Interesting, there some more information?
Interesting, there some more information?
Dave Skipper
Jun 26, 2016, 11:03:40 PM6/26/16
to drones-discuss
Hi Sorry for late reply,
I will post an update later regarding the Robopilot Flight Controller, we have been concentrating on our Nvidia TX1 products.
Reply all
Reply to author
Forward
0 new messages