
Mike McDonald
- Would you buy one of these Quadcopters?
- Is our price point reasonable? Is this something worth selling ourselves or would this be a good kickstarter project?
- Are there any other features you think are critical (wouldn't buy without it)?
- How does the software look (particularly the PRU to C interface)? Would you be willing to maintain it, or update it to State Variable?
- How does the PCB look? Are there any flaws you see? Would you want to add or remove any other sensors?
- How does the mechanical design (Quadcopter frame) look? Is it aesthetically pleasing? Easy to build (if you have a laser cutter, give it a try and let us know)? Easy to fix when broken?



Videos are available on here (and on the github). Our best video is probably here, as it shows it both flying as well as the streaming video.
If you guys have any questions, respond here or email me back.
Thanks!

Philip Polstra
I would like a longer flight time and something that can be flown outside in some wind. My primary focus is delivering a BBB equipped with 802.15.4 and wifi running my pentesting Linux distro to hard to reach targets.
--
For more options, visit http://beagleboard.org/discuss
---
You received this message because you are subscribed to the Google Groups "BeagleBoard" group.
To unsubscribe from this group and stop receiving emails from it, send an email to beagleboard...@googlegroups.com.
For more options, visit https://groups.google.com/d/optout.

Razvan Margineanu Andrei

Dave Nelson
Your project looks excelent and it is by far the coolest project involving the BBB. I have a few BBB laying around from an old project (about 50 :) ). Might consider trying something like this. Great work guys really great work.

Programmer
Hi,
Your project certain looks really interesting .
Yes, I would be interested in buying one if the proce doesn't exceed $250,-- but depending on the features
this would not be my limit.
Are you goinh to publich the diagrams and Software?
Can you post/email regularly.?
When do you expect a compeletion date?
Postage to the EU a problem?
All the best wishes for your project
NT

Warner Tabor
Mike McDonald
Mike McDonald
Mike McDonald
Mike McDonald

Jason Kridner
On Monday, May 12, 2014 8:11:10 PM UTC-4, Mike McDonald wrote:
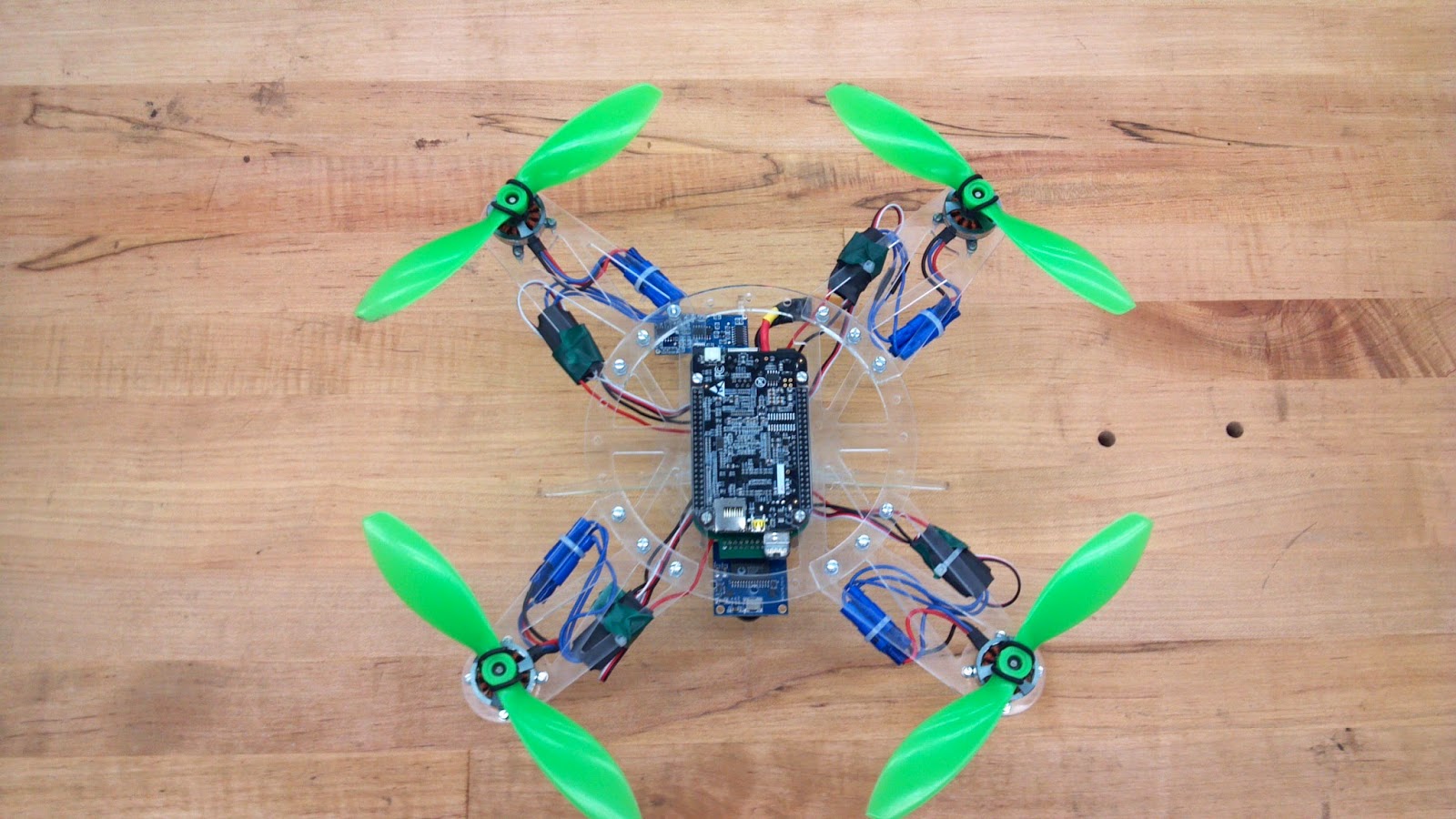
Hey guys,A group of Rose-Hulman students have been hard at work this past year building a Beaglebone Quadcopter with these goals in mind:1. Low cost ($100-150 w/o Beaglebone)2. Fully open source (Cape, Frame, and all control software) on our Github.3. Easy to assembly and repair (we estimate it will take 1-2 hours to assemble and get ready to fly)4. Durable and easy to fly (currently supports USB game controller control, though we initially tested using a USB RC controller, though it's also possible to eventually use a cell phone as a controller) with a 10 minute flight time5. Sensor packed: 9-Axis (MPU 9150), Altimeter (BMP 180), Ultrasonic Rangefinder (HC SR04), Battery Gas Gauge (MAX 17044), and CMOS Camera (OV7670).The Quadcopter is flown via WiFi and Bluetooth (though streaming video doesn't yet work over Bluetooth) from a host computer (you need somewhere to view the streaming video from). Additionally, we're using a Debian image and have added Xenomai for better real time performance. We're also using both PRU's: one for real time motor control and one for the camera. With the quadcopter software running, we've still got 80+% of the CPU free for other processing (OpenCV, etc.).We're currently using a PID control scheme, but we may be switching to a sweet state variable feedback system (or getting a senior design group next year to do it).So, we want some feedback from you guys on the following:
- Would you buy one of these Quadcopters?
- Is our price point reasonable? Is this something worth selling ourselves or would this be a good kickstarter project?
- Are there any other features you think are critical (wouldn't buy without it)?
If you want to dive deeper into our design:
- How does the software look (particularly the PRU to C interface)? Would you be willing to maintain it, or update it to State Variable?
- How does the PCB look? Are there any flaws you see? Would you want to add or remove any other sensors?
- How does the mechanical design (Quadcopter frame) look? Is it aesthetically pleasing? Easy to build (if you have a laser cutter, give it a try and let us know)? Easy to fix when broken?

Maxim Podbereznyy
As long as you keep adding unnecessary stuff to this thing it gets less time for fun (flying) because 3G or other dongles consume at lot of current. They are just designed to be fed by a wall outlet
Razvan Margineanu Andrei
I have some experience with 3g dongles on the beaglebone and they are very very unreliable. I've tried different models and they all suck. Also they are powerhungry, about 300 - 600 mAh at 5v. Depending on the state they are in idle or high power
You received this message because you are subscribed to a topic in the Google Groups "BeagleBoard" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/beagleboard/TkwaB8a9NIk/unsubscribe.
To unsubscribe from this group and all its topics, send an email to beagleboard...@googlegroups.com.

David Farning

feli...@butterflyenergy.ca

John Smith
If its a Kickstarter Project you've DEFINITELY got a backer here.
Please, keep me posted!
-J.B.
On Monday, May 12, 2014 8:11:10 PM UTC-4, Mike McDonald wrote:


