BeagleBone, i2c-2 and i2c-3 bus frequency

Tuwuh S
I am using Angstrom demo image Angstrom-Cloud9-IDE-eglibc-ipk-v2012.01-
core-beaglebone-2012.01.11.img.gz
First, I put pull-ups to SDA and SCL line of i2c-3 (I2C2 in SRM), and
probe the bus using i2cdetect. It looks normal:
root@beaglebone:~# i2cdetect -r -y 3
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- UU UU UU UU -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
From dmesg, I know that the bus frequency is 100kHz:
[ 0.884620] omap_i2c omap_i2c.3: bus 3 rev4.0 at 100 kHz
However when I check the SCL line with scope, I found that the bus
frequency is 25kHz instead of 100kHz.
I also try putting pull-ups to i2c-2 (I2C1 in SRM). The bus is enabled
by adding "i2c_bus=2,400" to boot arguments in uEnv.txt. Here I am
aiming for 400kHz bus frequency. The dmesg confirms that the bus has
been successfully configured:
[ 0.098696] omap_i2c omap_i2c.2: bus 2 rev4.0 at 400 kHz
When I check the SCL line, the bus frequency is measured to be 100kHz
instead of 400kHz. This is also /4 of the intended frequency like the
case of i2c-3.
Does anyone know how could I repair this? Do I need to set something
else to get the I2C working (something like clock divider, perhaps)?
Regards,
---
Tuwuh S
Tuwuh S
---
Tuwuh S

Maxim Podbereznyy
with air? Connect something tangible and play with it.
2012/4/19 Tuwuh S <tuw...@potensi.net>:
> Any updates on this? Does anyone also encounter the same issue?
>
>
> ---
> Tuwuh S
>
> -- To join: http://beagleboard.org/discuss
> To unsubscribe from this group, send email to:
> beagleboard...@googlegroups.com
> Frequently asked questions: http://beagleboard.org/faq
Tuwuh S
The frequency wouldn't change if I connect some device to the bus, would it?
---
Tuwuh S

Glen Duncan

Lars Poulsen
Maxim Podbereznyy
has the minimum of 25 kHz (not sure about this value), but the timeout
between clocks must be less than 35ms
2012/4/21 Lars Poulsen <larsop...@gmail.com>:
Tuwuh S
The other question is, is it possible to change the i2c bus frequency from userland? Or boot option?
Any pointers are welcomed...
---
Tuwuh S
Maxim Podbereznyy
argument: i2c_bus=3,100
This means: i2c bus 3, freq=100kHz
2012/4/23 Tuwuh S <tuw...@potensi.net>:

Zhivko
[ 1.501281] omap_i2c.3: alias fck already exists
[ 1.506439] omap_i2c omap_i2c.3: bus 3 rev2.4.0 at 100 kHz
Dne ponedeljek, 23. april 2012 07:47:33 UTC+2 je oseba lisarden napisala:
from u-boot you set bootargs for the kernel. There you can use this
argument: i2c_bus=3,100
This means: i2c bus 3, freq=100kHz
2012/4/23 Tuwuh S <tuw...@potensi.net>:
> Actually, I'm curious why this inconsistency occurs (between dmesg reported
> i2c frequency and the actual bus frequency).
> The other question is, is it possible to change the i2c bus frequency from
> userland? Or boot option?
>
> Any pointers are welcomed...
>
>
> ---
> Tuwuh S
>
> -- To join: http://beagleboard.org/discuss
> To unsubscribe from this group, send email to:
Zhivko
Dne ponedeljek, 23. april 2012 02:39:04 UTC+2 je oseba Tuwuh S napisala:

Steve Galle
Steve Galle
Tuwuh S
However I am wondering, why the internal clock must be set to 12000, not 16000 (which is 4 times the original 4000)?
---
Tuwuh S.
Steve Galle
21.3.15.3
How to Program I2C
Module Configuration Before Enabling the Module
Program the prescaler to obtain an approximately 12-MHz I2C module clock (I2C_PSC = x; this value is to be calculated and is dependent on the System clock frequency).
Zhivko
i2cspeed=3,400
mmcargs=setenv bootargs console=${console} i2c_bus=${i2cspeed} ${optargs} vram=${vram} omapfb.mode=${defaultdisplay}:${dvimode} omapdss.def_disp=${defaultdisplay} root=${mmcroot} rootfstype=${mmcrootfstype} ${device_args}Dne petek, 27. april 2012 08:27:36 UTC+2 je oseba Steve napisala:
Zhivko
Dne petek, 27. april 2012 10:08:41 UTC+2 je oseba Zhivko napisala:
Koen Kooi
Op 27 apr. 2012, om 10:08 heeft Zhivko het volgende geschreven:
> I think I made it.
>
> Change of uEnv.txt did the trick: lines that are important are (see attachment for full uEnv.txt):
>
> i2cspeed=3,400
> mmcargs=setenv bootargs console=${console} i2c_bus=${i2cspeed} ${optargs} vram=${vram} omapfb.mode=${defaultdisplay}:${dvimode} omapdss.def_disp=${defaultdisplay} root=${mmcroot} rootfstype=${mmcrootfstype} ${device_args}
>
>
> After reboot ob ubuntu on beagle it was easy to check i2c frequency in dmesg with:
>
> ubuntu@omap:~/uav-helicoptor-ece4007/software/units$ dmesg | grep Kernel
> [ 0.000000] Kernel command line: console=ttyO0,115200n8 i2c_bus=3,400 vram=12MB omapfb.mode=: omapdss.def_disp= root=/dev/mmcblk0p2 ro rootfstype=ext4 rootwait fixrtc ip=none
>
> and
>
> ubuntu@omap:~/uav-helicoptor-ece4007/software/units$ dmesg | grep i2c
> [ 0.000000] Kernel command line: console=ttyO0,115200n8 i2c_bus=3,400 vram=12MB omapfb.mode=: omapdss.def_disp= root=/dev/mmcblk0p2 ro rootfstype=ext4 rootwait fixrtc ip=none
> [ 0.100921] omap_i2c.1: alias fck already exists
> [ 0.104095] omap_i2c.3: alias fck already exists
> [ 0.112762] omap_i2c omap_i2c.1: bus 1 rev2.4.0 at 100 kHz
> [ 0.128997] omap_i2c omap_i2c.3: bus 3 rev2.4.0 at 400 kHz
>
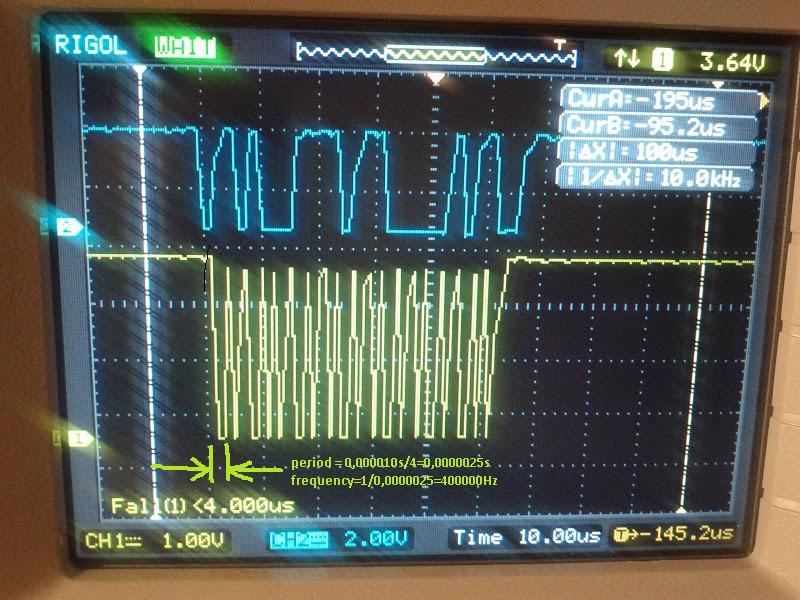
> I made some screenshots from osciloscope where it can be seen that i2c clock on bus 3 is running on 400kHz.
> https://picasaweb.google.com/lh/reorder?uname=110230689089207649183&aid=5735825684553527041
>
> But still it seems that reading data on i2c as file is quite a lot overhead - bug in i2c driver maybe?
regards,
Koen
Steve Galle
Frequently asked questions: http://beagleboard.org/faq
<uEnv.txt>
Zhivko
READ in 0s 733us
READ in 0s 488us
READ in 0s 397us
READ in 0s 397us
READ in 0s 366us
READ in 0s 367us
READ in 0s 366us
READ in 0s 488us
READ in 0s 397us
READ in 0s 366us
RAN 10 READS in 0s 4ms
Dne petek, 27. april 2012 13:28:15 UTC+2 je oseba Koen Kooi napisala:
Zhivko
Zhivko
Koen Kooi
regards,
Koen
Zhivko
Dne sobota, 28. april 2012 20:10:59 UTC+2 je oseba Koen Kooi napisala:

Jason Kridner
> I made simple i2c bechmark using:
>
> http://code.google.com/p/uav-helicoptor-ece4007/downloads/detail?name=i2c_bench.c&can=2&q=#makechanges
if(write(fd,buf,1) != 1) {
printf("ERROR Could not write to device\n");
return -1;
}
if(read(fd,buf,1) < 1) {
printf("ERROR Could not read from device\n");
return -1;
}
Do you need to perform the write before every read? There is a chance
that Linux isn't flushing the write very quickly. There might even be
things like 'elevator' algorithms that try to aggregate writes
together before taking big I/O hits. It could be that character
drivers don't typically have those, but I'm more familiar with block
driver implementations myself. Anyway, you could be wasting a ton of
your time in-between those operations without having useful activity
on the bus.
If you do need the write, you might consider using a 'flush'.
Is it possible for you to turn it into a single operation per [1]:
123 ioctl(file, I2C_RDWR, struct i2c_rdwr_ioctl_data *msgset)
124 Do combined read/write transaction without stop in between.
125 Only valid if the adapter has I2C_FUNC_I2C. The argument is
126 a pointer to a
127
128 struct i2c_rdwr_ioctl_data {
129 struct i2c_msg *msgs; /* ptr to array of simple messages */
130 int nmsgs; /* number of messages to exchange */
131 }
132
133 The msgs[] themselves contain further pointers into data buffers.
134 The function will write or read data to or from that buffers depending
135 on whether the I2C_M_RD flag is set in a particular message or not.
136 The slave address and whether to use ten bit address mode has to be
137 set in each message, overriding the values set with the above ioctl's.
[1] http://www.mjmwired.net/kernel/Documentation/i2c/dev-interface#123
Also, would it make sense to make the write non-blocking with
O_NONBLOCK? My thought is that it might save a context switch, but
I'm not that clear on the topic. Just trying to throw some thoughts
out there.
>
> I am using i2c as channel like this:
>
> if((fd = open("/dev/i2c-3",O_RDWR)) < 1) {
> printf("ERROR Opening File\n");
> return -1;
> }
>
> if(ioctl(fd,I2C_SLAVE,addr)) {
> printf("ERROR Opening Device\n");
> return -1;
> }
> and then issuing 1 write and 1 read.
>
> And I am getting:
>
> sudo ./i2c_bench 83 0 10
> READ in 0s 733us
> READ in 0s 488us
> READ in 0s 397us
> READ in 0s 397us
> READ in 0s 366us
> READ in 0s 367us
> READ in 0s 366us
> READ in 0s 488us
> READ in 0s 397us
> READ in 0s 366us
> RAN 10 READS in 0s 4ms
>
> So aproximately 1 read in 4ms. That's after I enabled 400kH speed on bus.
>
> I think 4ms for read from i2c is too little for our project - can you
> prupose different way of doing it?
pipeline the operations a bit.
Of course, the recommendation to perform the operations in a kernel
driver could provide obvious benefits. Simply moving to the best
kernel interface functions that avoid needing to switch back and forth
should give some benefit.

jyore
Tuwuh S
Regarding the incorrect I2C clock, still, I think this is a kind of bug in the Beaglebone kernel I2C driver, which should be fixed.
This does not seem to be a big problem, yet it may be important for others who use Beaglebone as a development platform.
---
Tuwuh S
Steve Galle
Hiremath, Vaibhav
> It's definitely a bug. I have generated a patch set that fixes it, but I
> don't know how to submit it (although at the 12kHz clock rate the TRM
> specifies the rates are still a little slow, haven't quite nailed it),
> and I don't have enough time to go through the process of figuring it
> out. Is the process clearly spelled out on any one wiki page? If not,
> I'm happy to send the patch to anyone who knows the process and has time
> to submit it for inclusion in the distro.
>
baseport issues.
This seems to be major bug in the baseport, I already have this in my TODO
list, especially hwmod related changes which you have done to fix this. Also,
Clock tree should make sure that you get desired functional clock, if that's
not happening, I would also consider it as a bug.
Let me finish my current activity, then I will work on this.
Thanks,
Vaibhav
Steve Galle
Index: git/arch/arm/mach-omap2/omap_hwmod_33xx_data.c
===================================================================
--- git.orig/arch/arm/mach-omap2/omap_hwmod_33xx_data.c 2012-04-26 23:38:21.830141828 -0700
+++ git/arch/arm/mach-omap2/omap_hwmod_33xx_data.c 2012-04-26 23:41:08.337546725 -0700
@@ -1243,7 +1243,8 @@
static struct omap_i2c_dev_attr i2c_dev_attr = {
.flags = OMAP_I2C_FLAG_BUS_SHIFT_NONE |
- OMAP_I2C_FLAG_RESET_REGS_POSTIDLE,
+ OMAP_I2C_FLAG_RESET_REGS_POSTIDLE |
+ OMAP_I2C_FLAG_FORCE_12000_INT_CLK,
};
static struct omap_hwmod_class i2c_class = {
Index: git/drivers/i2c/busses/i2c-omap.c
===================================================================
--- git.orig/drivers/i2c/busses/i2c-omap.c 2012-04-26 23:38:44.813510057 -0700
+++ git/drivers/i2c/busses/i2c-omap.c 2012-04-26 23:40:14.671019065 -0700
@@ -408,6 +408,8 @@
if (dev->speed > 400 ||
pdata->flags & OMAP_I2C_FLAG_FORCE_19200_INT_CLK)
internal_clk = 19200;
+ else if (pdata->flags & OMAP_I2C_FLAG_FORCE_12000_INT_CLK)
+ internal_clk = 12000;
else if (dev->speed > 100)
internal_clk = 9600;
else
Index: git/include/linux/i2c-omap.h
===================================================================
--- git.orig/include/linux/i2c-omap.h 2012-04-26 23:39:23.052443403 -0700
+++ git/include/linux/i2c-omap.h 2012-04-26 23:39:47.459764332 -0700
@@ -24,6 +24,8 @@
#define OMAP_I2C_FLAG_APPLY_ERRATA_I207 BIT(4)
#define OMAP_I2C_FLAG_ALWAYS_ARMXOR_CLK BIT(5)
#define OMAP_I2C_FLAG_FORCE_19200_INT_CLK BIT(6)
+#define OMAP_I2C_FLAG_FORCE_12000_INT_CLK BIT(9)
+
/* how the CPU address bus must be translated for I2C unit access */
#define OMAP_I2C_FLAG_BUS_SHIFT_NONE 0
#define OMAP_I2C_FLAG_BUS_SHIFT_1 BIT(7)
As I said before the clock is still slightly slow, so there may be more tweaks required.
Steve
Zhivko
Dne sreda, 02. maj 2012 08:35:45 UTC+2 je oseba Steve napisala:
Koen Kooi
Op 4 mei 2012, om 14:12 heeft Zhivko het volgende geschreven:
> Could we expect this to be patch that we could get it from "opkg update" ?
> Trying to use i2c and the it seems reading bytes from i2c device seems to be unstable. Could somebody push this patch ?
Klemen Živkovič
Steve Galle
Zhivko
Dne petek, 04. maj 2012 15:47:34 UTC+2 je oseba Steve napisala:
I have said before, if someone can point me at concise instructions for generating an appropriate patch then I'm happy to do it. I put the time into working out at least some of what was wrong, but I don't have the time to noodle around right now figuring out how to submit this. I suspect if I knew the process it's probably only a few minutes of work; is there a tutorial anywhere that walks through the steps?Thanks,
Steve
On May 4, 2012, at 5:43 AM, Klemen Živkovič wrote:
Steve and Koen,
can you two work out his specific format for patch issue - to allow also others to get this update?Thanks to both of you,
Klemen
On Fri, May 4, 2012 at 2:21 PM, Koen Kooi <ko...@beagleboard.org> wrote:
Op 4 mei 2012, om 14:12 heeft Zhivko het volgende geschreven:
No, it needs to be in the git-format-patch format with a signed-off-by line before I can take it.
> Could we expect this to be patch that we could get it from "opkg update" ?
> Trying to use i2c and the it seems reading bytes from i2c device seems to be unstable. Could somebody push this patch ?
-- To join: http://beagleboard.org/discuss
To unsubscribe from this group, send email to:

Pacifico
Koen Kooi
Op 16 mei 2012, om 06:55 heeft Pacifico het volgende geschreven:
> I am new to Beagle (mine is on the way), but fairly experienced with Git. I thought I would take this on because the first thing I need out of my BeagleBone is i2c.
>
> I could not locate the first of the three files Steve modified (arch/arm/mach-omap2/omap_hwmod_33xx_data.c) in the tree I cloned with git clone git://git.kernel.org/pub/scm/linux/kernel/git/tmlind/linux-omap.git. I did find a similarly named arch/arm/mach-omap2/omap_hwmod_3xxx_data.c but the diff does not look like it came from that file.
>
> I am willing to try to address this, but I'd need either Steve's original file for comparison purposes or to get pointed to the correct git repo.
Steve Galle
Pacifico
git clone git://github.com/beagleboard/kernel.gitpushd kernel/git checkout origin/beaglebone-3.2 -b beaglebone-3.2./patch.sh
ls -1
exportkernelpatchespatch_script.shpatch.shREADME.mdsrc-uri.txt
git branch i2c-prescaler-fixgit checkout i2c-prescaler-fix
scite kernel/arch/arm/mach-omap2/omap_hwmod_33xx_data.c kernel/drivers/i2c/busses/i2c-omap.c kernel/include/linux/i2c-omap.h &
[alberto@caboto kernel]$ git status# On branch i2c-prescaler-fixnothing to commit (working directory clean)[alberto@caboto kernel]$ pushd kernel~/Development/oe/kernel/kernel ~/Development/oe/kernel ~/Development/oe ~/Development ~[alberto@caboto kernel]$ git branchmastertmp-patching-branch* tmp-patching-branch-sha[alberto@caboto kernel]$ git status# On branch tmp-patching-branch-sha# Changes not staged for commit:# (use "git add <file>..." to update what will be committed)# (use "git checkout -- <file>..." to discard changes in working directory)## modified: arch/arm/mach-omap2/omap_hwmod_33xx_data.c# modified: drivers/i2c/busses/i2c-omap.c# modified: include/linux/i2c-omap.h#no changes added to commit (use "git add" and/or "git commit -a")[alberto@caboto kernel]$

Robert Nelson
upstream tree, to help generate the patchset found under "export"
which both Angstrom and my ubuntu/debian scripts use directly.....
For the kernel dir/git we aren't planning to have users push that
directly, as it's more throw away, but i believe koen was planning to
push a tree based off it somewhere on github just to make things
eaiser..
When used as a development tree i usually run "./patch.sh" to generate
a fresh kernel dir, then apply/tweak my patch to that directory, then
run "git add/git commit -a -m" and with the output of "git
format-patch -1", copy that new "git am'ble" patch to the patches
directory into the appropriate subfolder.. Modifing patch.sh
directory listing if it's something unrelated and thus a new dir..
Regards,
--
Robert Nelson
http://www.rcn-ee.com/
Pacifico
When used as a development tree i usually run "./patch.sh" to generate
a fresh kernel dir, then apply/tweak my patch to that directory, then
run "git add/git commit -a -m" and with the output of "git
format-patch -1", copy that new "git am'ble" patch to the patches
directory into the appropriate subfolder.. Modifing patch.sh
directory listing if it's something unrelated and thus a new dir..
Regards,
--
Robert Nelson
http://www.rcn-ee.com/
Robert Nelson
>> a fresh kernel dir, then apply/tweak my patch to that directory, then
>> run "git add/git commit -a -m" and with the output of "git
>
>
> "git add" did not function for me as expected from within the kernel
> directory, and I found that pretty confusing. That was what I was referring
> to in the sixth paragraph.
git index... So if you just modify something already in the index it's
not going to do too much..
If your working with capes (creating a new, etc..), your probally
going to be modifying the board file used by the BeagleBone.. In this
case (arch/arm/mach-omap2/board-am335xevm.c)
>> format-patch -1", copy that new "git am'ble" patch to the patches
>> directory into the appropriate subfolder.. Modifing patch.sh
>
>
> I assume Koen copies the patch after reviewing it, then?
makes something work.. If something breaks, then both Angstrom's
meta-ti and my builddeb scripts will fail...
> I think having clear instructions about how to go about this is pretty
> important to speeding refinement of the BeagleBone software, since it will
> decrease frustration on the part of contributors. Hacking this sort of stuff
> is far removed from what I am trying to accomplish with my BeagleBone
> (providing a web interface for control of a device), and simplicity is what
> I am looking for. I came to the BeagleBone because Arduino wasn't meeting my
> needs and was a pain to debug compared to userspace code on your average
> Linux box.
> -Al
for contributors, but unfortunately it does require some knowledge
about using git in its current form.. It's main purpose is still to
quickly share the current Angstrom/Ubuntu kernel source tree currently
used by the BeagleBone (and other Beagle devices). Such that
contributors can easily generate the same kernel source tree and more
easily submit patches to beagl...@googlegroups.com or via
github.com/beagleboard without having to learn bitbake/builddeb
scripts...
BTW: see Bas's BEBOPR cape patchset for a good example of this working..
https://github.com/beagleboard/kernel/commit/6fa43bcfa4e948db5a37c8b298cb7a3e7894fd97
and just like that his BEBOPR cape is now on the fast track to be
supported by Angstrom/Ubuntu/Debian..

Al Pacifico
I think it's supposed to be like so:optargs=run_hardware_tests i2c_bus=2,400
However, it appears that nothing I'm putting in uEnv.txt is getting read on boot using the latest Angstrom-Cloud9-IDE-GNOME-eglibc-ipk-v2012.05-beaglebone-2012.06.18.img. Also, my info.txt is not getting updated with any system info. Perhaps these two issues are related?
I can however stop the boot process at the uBoot prompt and edit the env variables there, but saveenv isn't working.
What pins is the /dev/i2c-2 bus exposed at, if any? My current impression is that /dev/i2c-1 (I2C1 in the SRM) is at pins 17&18, and /dev/i2c-3 (SRM I2C2) is at pins 19&20. Is this correct?
T
On Friday, July 27, 2012 6:45:55 PM UTC-7, tcmichals wrote:I'm using 3.2.23 kernel, ie the standard sdcard image. I'm trying to se the i2c speed to 400khz, dmsg[ 0.099945] omap_i2c.1: alias fck already exists[ 0.110961] omap_i2c omap_i2c.1: bus 1 rev2.4.0 at 100 kHz[ 0.234252] omap_i2c.3: alias fck already exists[ 0.234497] omap_i2c omap_i2c.3: bus 3 rev2.4.0 at 100 kHz[ 0.525878] i2c /dev entries driverroot@beaglebone:~# uname -aroot@beaglebone:/boot# more uEnv.txtoptargs=run_hardware_testsi2c_bus=2400root@beaglebone:/boot#I tried changing i2c_bus 4200, etc, but nothing changes. Any suggestions?
Please forgive typo's, equally likely to have been typed on cell phone and to have been typed one-handed.

Andreas
Klemen Živkovič
--
Kingbäck Andreas
--
Klemen Živkovič
Kingbäck Andreas
Zhivko
Dne sobota, 24. november 2012 17:52:54 UTC+1 je oseba Andreas napisala:
{kind=link}