Neato Node On Raspberry Pi Experiment complete, I think.
350 views
Skip to first unread message

anfederman@comcast
May 9, 2013, 3:32:32 PM5/9/13
to hbrob...@googlegroups.com, Ubiquity
The good news:
Mike's Neato-node Catkinized code under Groovy works on
the RPi. I was able to get the LDS spinning and return valid measurements
via rostopic echo.
The only modification needed to make it work was the
same thing I needed to do to get it to work under Ubuntu - which was
changing USB0 to ACM0 in the node neato.py script. (Don't yell at me
Fergy)
The bad news:
It was too slow to be useful for navigation. Nothing
showed up on a remote RVIZ. as a matter of fact a rostopic echo command
returned nothing after several minutes of waiting. I suspect this has to do with
the RPi architecture, the USB and Ethernet are sharing the same circuit. I had
the Ethernet going to a an older private wireless bridge, but I suspect even If
I had it connected directly to a hub, the results would be the
same.
The quest for the Holy Grail of inexpensive robot
navigation will continue.
So many windmills, so little time.
Alan N. Federman, PhD
http://federman.best.vwh.net
http://www.linkedin.com/in/alan1federman
(408)227-6106 Home
(408)826-1795 Mobile
http://federman.best.vwh.net
http://www.linkedin.com/in/alan1federman
(408)227-6106 Home
(408)826-1795 Mobile

Michael Ferguson
May 9, 2013, 3:50:21 PM5/9/13
to hbrob...@googlegroups.com
Are you sure that your remote machine and network are set up correctly? A laserscan with 360 points, even at 5hz, is not much data. You may not get 5hz, but no data sounds like a network misconfig. What does rostopic hz return if run locally on the Pi?
-Fergs
--
You received this message because you are subscribed to the Google Groups "HomeBrew Robotics Club" group.
To unsubscribe from this group and stop receiving emails from it, send an email to hbrobotics+...@googlegroups.com.
To post to this group, send email to hbrob...@googlegroups.com.
Visit this group at http://groups.google.com/group/hbrobotics?hl=en.
For more options, visit https://groups.google.com/groups/opt_out.
anfederman@comcast
May 9, 2013, 10:55:59 PM5/9/13
to hbrob...@googlegroups.com
Thanks for the info Mike.
I'll check it out. rostopic echo worked locally on
the Pi, but did not return any data to the remote. rostopic list
showed all the nodes.
I'll also try over a hub to see if that
helps.
Of course if network is the issue, it still will
eliminate RPi as a platform for what I want to do.
Neato -USB-RPi= Ethernet-Wireless
Router-> <-WiFi-remote-laptop
I was using a wireless-b router so max through-put was
11Mb
Michael Ferguson
May 9, 2013, 11:24:32 PM5/9/13
to hbrob...@googlegroups.com
I'm not saying the Pi networking is not good enough -- I'm suggesting that your ROS environment variables for network related things may not be right -- specifically ROS_HOSTNAME. Just because your ROS network variables are correct enough for rostopic list to work, rostopic echo does not necessarily work.
Here's why: let's say you have computers P and Q, P is your raspberry pi, where the rosmaster is running. Q is your desktop machine. If you run 'rostopic list' from Q, Q needs to have "ROS_MASTER_URI=http://P:11311", and that is it -- listing the topics only requires a single service call to the master. Now, in the case of 'rostopic echo' there is much more going on. There is the initial service call to find out where the topic is, so Q still needs to know ROS_MASTER_URI=http://P:11311, but once Q has subscribed to the topic (on P), P needs to send packets directly to Q -- without Q opening the socket originally. Therefore, P now needs to be able to resolve where Q is. If Q has a ROS_HOSTNAME which is not resolvable on P, rostopic echo will never get packets.
-Fergs
anfederman@comcast
May 10, 2013, 9:16:02 AM5/10/13
to hbrob...@googlegroups.com
Thanks Fergy.
On the RPi ROS_MASTER_URI is Set.
On the remote, ROS_MASTER_URI and ROS_IP are
set.
Since I started the node on the master using SSH from
the remote, I am uncertain how the master wouldn't see the remote. What
environment variables aren't set?
I'll check it out. You might be on to something since
RPi environments and hostname resolving are a little different than
Ubuntu.

Steve " 'dillo" Okay (Roadknight Mobility Labs)
May 10, 2013, 11:04:03 AM5/10/13
to hbrob...@googlegroups.com
>
>
> On Thu, May 9, 2013 at 7:55 PM, anfederman@comcast <anfed...@comcast.net> wrote:
>
> Thanks for the info Mike.
>
> I'll check it out. rostopic echo worked locally on the Pi, but did not return any data to the remote. rostopic list showed all the nodes.
> I'll also try over a hub to see if that helps.
>
> Of course if network is the issue, it still will eliminate RPi as a platform for what I want to do.
>
> Neato -USB-RPi= Ethernet-Wireless Router-> <-WiFi-remote-laptop
>
> I was using a wireless-b router so max through-put was 11Mb
>
I agree that this is very likely a networking issue. With my own Neato LDS using a BeagleBone as the ROS master and a small netbook
>
> On Thu, May 9, 2013 at 7:55 PM, anfederman@comcast <anfed...@comcast.net> wrote:
>
> Thanks for the info Mike.
>
> I'll check it out. rostopic echo worked locally on the Pi, but did not return any data to the remote. rostopic list showed all the nodes.
> I'll also try over a hub to see if that helps.
>
> Of course if network is the issue, it still will eliminate RPi as a platform for what I want to do.
>
> Neato -USB-RPi= Ethernet-Wireless Router-> <-WiFi-remote-laptop
>
> I was using a wireless-b router so max through-put was 11Mb
>
as the remote node, I've been able to get the '/scan' topic to show up on the netbook and see packets when doing a 'rostopic echo /scan'
from the netbook, with ROS_MASTER_URI="http://beaglebone:11311"
Catkin-ized laser node ? forgive me if I'm a bit behind, where did you get this from ? I did what I thought was a fairly thorough search of the web
(and work) and found only the CWRU version so I installed that. My 'bot is also running ROS Groovy and I know that catkin-based packages are
preferred. Where can I get this from ?
While I'm able to get the /scan topic echo-ed across the network, I'm not getting any data in rviz. An error shows up on my LaserScan topic.
I can post the diagnostics if somebody wants to see them, but if this could be solved by a newer, more recent package, that would be better
and would save bandwidth on the mailing list.
Alan, I don't think you should give up yet. I'm pretty sure we're both just steps away from robotic awesomeness.
-----Steve
anfederman@comcast
May 10, 2013, 2:17:16 PM5/10/13
to hbrob...@googlegroups.com, Ubiquity
THANKS FERGY and DILLO, SUCCESS! RVIZ is showing data from the RPi via
wireless networking.
I had the ROS_MASTER_URI set correctly, but the ROS_IP was not set on both
the master and remote. It works the same both wired and wireless, though it
takes about 2 to 3 seconds for an object move to get updated. I am running
the network at 11 mb to simulate real world conditions. (The real world
condition is no money to buy a 100mb router;-)
Good debugging there guys. You diagnosed the issue precisely and told me
exactly where to look to fix the issue. Thanks for the support and
encouragement.
One more requirement for my geek merit badge is complete!
--------------------------------------------------
From: "Steve " 'dillo" Okay (Roadknight Mobility Labs)"
<arma...@gothpunk.com>
> Catkin-ized laser node ? forgive me if I'm a bit behind, where did you get
> this from ? I did what I thought was a fairly thorough search of the
> web......
https://github.com/mikeferguson/neato_robot
From the hub and wiki - since I am using both the ros_arduino_bridge from
a ros_workspace and the neato_node from a catkin_ws - I followed the
instructions in the ros_wiki to enable both. The setup.bash in the
ros_workspace sets up the catkin packages as well.
Fergy made some changes to the neato-node so it works from Groovy and
follows the 'make' logic better. Notes are on the git hub. And there is an
older discussion on HBRC. I don't know the nitty-gritty of Catkin vs.
ros_make. I just bang the rocks together until I get a spark.
wireless networking.
I had the ROS_MASTER_URI set correctly, but the ROS_IP was not set on both
the master and remote. It works the same both wired and wireless, though it
takes about 2 to 3 seconds for an object move to get updated. I am running
the network at 11 mb to simulate real world conditions. (The real world
condition is no money to buy a 100mb router;-)
Good debugging there guys. You diagnosed the issue precisely and told me
exactly where to look to fix the issue. Thanks for the support and
encouragement.
One more requirement for my geek merit badge is complete!
--------------------------------------------------
From: "Steve " 'dillo" Okay (Roadknight Mobility Labs)"
<arma...@gothpunk.com>
> Catkin-ized laser node ? forgive me if I'm a bit behind, where did you get
> this from ? I did what I thought was a fairly thorough search of the
https://github.com/mikeferguson/neato_robot
From the hub and wiki - since I am using both the ros_arduino_bridge from
a ros_workspace and the neato_node from a catkin_ws - I followed the
instructions in the ros_wiki to enable both. The setup.bash in the
ros_workspace sets up the catkin packages as well.
Fergy made some changes to the neato-node so it works from Groovy and
follows the 'make' logic better. Notes are on the git hub. And there is an
older discussion on HBRC. I don't know the nitty-gritty of Catkin vs.
ros_make. I just bang the rocks together until I get a spark.

James Ronald
May 10, 2013, 3:24:30 PM5/10/13
to hbrob...@googlegroups.com
Did you guys build ROS from sourcez or did you use the binary packages
available from the ROS Wheezy repositories?
- Jim
available from the ROS Wheezy repositories?
- Jim
anfederman@comcast
May 10, 2013, 4:19:02 PM5/10/13
to hbrob...@googlegroups.com
I believe the initial build of Groovy on Raspian was built from source (It
took a long time). Once we had the original image on a SD card, we augmented
with supplementary packages in either a ros_workspace or Catkin workspace.
Checkout from GIT hub and make(s) are pretty quick.
--------------------------------------------------
From: "James Ronald" <james....@gmail.com>
Sent: Friday, May 10, 2013 12:24 PM
To: <hbrob...@googlegroups.com>
Subject: Re: [HBRobotics] Re:Neato Node On Raspberry Pi Experiment complete,
I think.
took a long time). Once we had the original image on a SD card, we augmented
with supplementary packages in either a ros_workspace or Catkin workspace.
Checkout from GIT hub and make(s) are pretty quick.
--------------------------------------------------
From: "James Ronald" <james....@gmail.com>
Sent: Friday, May 10, 2013 12:24 PM
To: <hbrob...@googlegroups.com>
Subject: Re: [HBRobotics] Re:Neato Node On Raspberry Pi Experiment complete,
I think.

Janez Cimerman
Oct 26, 2015, 6:46:26 PM10/26/15
to HomeBrew Robotics Club, ubiquit...@googlegroups.com, anfed...@comcast.net
If somebody is still stuck on enabling ROS, Neato and Hector SLAM on RPI2, here is how i set it up:

Ralph Hipps
Oct 27, 2015, 11:01:16 AM10/27/15
to HomeBrew Robotics Club, ubiquit...@googlegroups.com, anfed...@comcast.net
Alan,
where do you set ROS_MASTER_URI and ROS_IP? (pardon my newbieness). =)
where do you set ROS_MASTER_URI and ROS_IP? (pardon my newbieness). =)

Camp Peavy
Oct 27, 2015, 1:06:16 PM10/27/15
to hbrob...@googlegroups.com, ubiquit...@googlegroups.com, anfed...@comcast.net
> where do you set ROS_MASTER_URI and ROS_IP? (pardon my newbieness). =)
You set "ROS_MASTER_URI and ROS_IP" in the .bashrc file.
It should look something like this:
On the master... host and master should be the same IP address but on the remote workstation it is as above.
- Camp
From: Ralph Hipps <ralph...@gmail.com>
To: HomeBrew Robotics Club <hbrob...@googlegroups.com>
Cc: ubiquit...@googlegroups.com; anfed...@comcast.net
Sent: Tuesday, October 27, 2015 8:01 AM
Subject: Re: [HBRobotics] Re:Neato Node On Raspberry Pi Experiment success.
Visit this group at http://groups.google.com/group/hbrobotics.
For more options, visit https://groups.google.com/d/optout.
For more options, visit https://groups.google.com/d/optout.

Wayne C. Gramlich
Oct 27, 2015, 1:43:09 PM10/27/15
to hbrob...@googlegroups.com, Wayne C. Gramlich
All:
I am far from an expert on ROS environment variables...
The only ROS environment variables I know of are listed in:
http://wiki.ros.org/ROS/EnvironmentVariables
To the best of my knowledge, there is no ROS_HOST environment variable.
You can set you ROS_IP to an internet address or ROS_HOSTNAME
to a DNS name such as HOSTNAME.local. If you set both,
ROS_HOSTNAME takes precedence over ROS_IP.
My personal opinion is that setting ROS_IP is likely to be brittle
and break over time. I recommend using zeroconf for your robot naming
needs.
Under Ubuntu:
sudo apt-get install libnss-mdns
will install zeroconf. You may need to reboot.
When get:
ping `hostname`.local
to work, you have zeroconf properly installed. Placing
export ROS_HOSTNAME=`hostname`.local
into your `.bashrc` file should do the trick.
I found the documentation for ROS_HOSTNAME and ROS_PI to be
a bit confusing. ROS_HOSTNAME names the computer executes the
`.bashrc` file. If you run the `.bashrc` file on your laptop,
it provides the name of the laptop (not the robot). If you
run the `.bashrc` on the robot, it names the robot. Thus,
export ROS_HOSTNAME=`hosname`.local
will do the right thing for both the laptop and the robot.
There is some addition stuff you can do to your `/etc/hosts` configuration
file to improve things slightly, but that is a bit obscure and I will
skip it for now.
I hope this helps,
Regards,
-Wayne
On 10/27/2015 10:06 AM, 'Camp Peavy' via HomeBrew Robotics Club wrote:
>>where do you set ROS_MASTER_URI and ROS_IP? (pardon my newbieness). =)
> You set "ROS_MASTER_URI and ROS_IP" in the .bashrc file.
> It should look something like this:
> export ROS_MASTER_URI=http://192.168.43.134:11311
> export ROS_HOST=192.168.43.20
> On the master... host and master should be the same IP address but on the remote workstation it is as above.
> - Camp
>
> ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
> *From:* Ralph Hipps <ralph...@gmail.com>
> *To:* HomeBrew Robotics Club <hbrob...@googlegroups.com>
> *Cc:* ubiquit...@googlegroups.com; anfed...@comcast.net
> *Sent:* Tuesday, October 27, 2015 8:01 AM
> *Subject:* Re: [HBRobotics] Re:Neato Node On Raspberry Pi Experiment success.
> > For more options, visit https://groups.google.com/ groups/opt_out <https://groups.google.com/groups/opt_out>.
[snippage]
I am far from an expert on ROS environment variables...
The only ROS environment variables I know of are listed in:
http://wiki.ros.org/ROS/EnvironmentVariables
To the best of my knowledge, there is no ROS_HOST environment variable.
You can set you ROS_IP to an internet address or ROS_HOSTNAME
to a DNS name such as HOSTNAME.local. If you set both,
ROS_HOSTNAME takes precedence over ROS_IP.
My personal opinion is that setting ROS_IP is likely to be brittle
and break over time. I recommend using zeroconf for your robot naming
needs.
Under Ubuntu:
sudo apt-get install libnss-mdns
will install zeroconf. You may need to reboot.
When get:
ping `hostname`.local
to work, you have zeroconf properly installed. Placing
export ROS_HOSTNAME=`hostname`.local
into your `.bashrc` file should do the trick.
I found the documentation for ROS_HOSTNAME and ROS_PI to be
a bit confusing. ROS_HOSTNAME names the computer executes the
`.bashrc` file. If you run the `.bashrc` file on your laptop,
it provides the name of the laptop (not the robot). If you
run the `.bashrc` on the robot, it names the robot. Thus,
export ROS_HOSTNAME=`hosname`.local
will do the right thing for both the laptop and the robot.
There is some addition stuff you can do to your `/etc/hosts` configuration
file to improve things slightly, but that is a bit obscure and I will
skip it for now.
I hope this helps,
Regards,
-Wayne
On 10/27/2015 10:06 AM, 'Camp Peavy' via HomeBrew Robotics Club wrote:
>>where do you set ROS_MASTER_URI and ROS_IP? (pardon my newbieness). =)
> You set "ROS_MASTER_URI and ROS_IP" in the .bashrc file.
> It should look something like this:
> export ROS_MASTER_URI=http://192.168.43.134:11311
> export ROS_HOST=192.168.43.20
> On the master... host and master should be the same IP address but on the remote workstation it is as above.
> - Camp
>
> *From:* Ralph Hipps <ralph...@gmail.com>
> *To:* HomeBrew Robotics Club <hbrob...@googlegroups.com>
> *Cc:* ubiquit...@googlegroups.com; anfed...@comcast.net
> *Sent:* Tuesday, October 27, 2015 8:01 AM
> *Subject:* Re: [HBRobotics] Re:Neato Node On Raspberry Pi Experiment success.
>
> Alan,
>
> where do you set ROS_MASTER_URI and ROS_IP? (pardon my newbieness). =)
>
>
> On Friday, May 10, 2013 at 11:17:16 AM UTC-7, anfederman@comcast wrote:
>
> THANKS FERGY and DILLO, SUCCESS! RVIZ is showing data from the RPi via
> wireless networking.
>
> I had the ROS_MASTER_URI set correctly, but the ROS_IP was not set on both
> the master and remote. It works the same both wired and wireless, though it
> takes about 2 to 3 seconds for an object move to get updated. I am running
> the network at 11 mb to simulate real world conditions. (The real world
> condition is no money to buy a 100mb router;-)
>
> Good debugging there guys. You diagnosed the issue precisely and told me
> exactly where to look to fix the issue. Thanks for the support and
> encouragement.
>
> One more requirement for my geek merit badge is complete!
>
> ------------------------------ --------------------
> From: "Steve " 'dillo" Okay (Roadknight Mobility Labs)"
> <arma...@gothpunk.com>
>
> > Catkin-ized laser node ? forgive me if I'm a bit behind, where did you get
> > this from ? I did what I thought was a fairly thorough search of the
> > web......
>
> https://github.com/ mikeferguson/neato_robot <https://github.com/mikeferguson/neato_robot>
> Alan,
>
> where do you set ROS_MASTER_URI and ROS_IP? (pardon my newbieness). =)
>
>
> On Friday, May 10, 2013 at 11:17:16 AM UTC-7, anfederman@comcast wrote:
>
> THANKS FERGY and DILLO, SUCCESS! RVIZ is showing data from the RPi via
> wireless networking.
>
> I had the ROS_MASTER_URI set correctly, but the ROS_IP was not set on both
> the master and remote. It works the same both wired and wireless, though it
> takes about 2 to 3 seconds for an object move to get updated. I am running
> the network at 11 mb to simulate real world conditions. (The real world
> condition is no money to buy a 100mb router;-)
>
> Good debugging there guys. You diagnosed the issue precisely and told me
> exactly where to look to fix the issue. Thanks for the support and
> encouragement.
>
> One more requirement for my geek merit badge is complete!
>
> ------------------------------ --------------------
> From: "Steve " 'dillo" Okay (Roadknight Mobility Labs)"
> <arma...@gothpunk.com>
>
> > Catkin-ized laser node ? forgive me if I'm a bit behind, where did you get
> > this from ? I did what I thought was a fairly thorough search of the
> > web......
>
>
> From the hub and wiki - since I am using both the ros_arduino_bridge from
> a ros_workspace and the neato_node from a catkin_ws - I followed the
> instructions in the ros_wiki to enable both. The setup.bash in the
> ros_workspace sets up the catkin packages as well.
> Fergy made some changes to the neato-node so it works from Groovy and
> follows the 'make' logic better. Notes are on the git hub. And there is an
> older discussion on HBRC. I don't know the nitty-gritty of Catkin vs.
> ros_make. I just bang the rocks together until I get a spark.
>
> > --
> > You received this message because you are subscribed to the Google Groups
> > "HomeBrew Robotics Club" group.
> > To unsubscribe from this group and stop receiving emails from it, send an
> > email to hbrobotics+...@ googlegroups.com.
> > To post to this group, send email to hbrob...@googlegroups.com.
> > Visit this group at http://groups.google.com/ group/hbrobotics?hl=en <http://groups.google.com/group/hbrobotics?hl=en>.
> From the hub and wiki - since I am using both the ros_arduino_bridge from
> a ros_workspace and the neato_node from a catkin_ws - I followed the
> instructions in the ros_wiki to enable both. The setup.bash in the
> ros_workspace sets up the catkin packages as well.
> Fergy made some changes to the neato-node so it works from Groovy and
> follows the 'make' logic better. Notes are on the git hub. And there is an
> older discussion on HBRC. I don't know the nitty-gritty of Catkin vs.
> ros_make. I just bang the rocks together until I get a spark.
>
> > --
> > You received this message because you are subscribed to the Google Groups
> > "HomeBrew Robotics Club" group.
> > To unsubscribe from this group and stop receiving emails from it, send an
> > email to hbrobotics+...@ googlegroups.com.
> > To post to this group, send email to hbrob...@googlegroups.com.
> > For more options, visit https://groups.google.com/ groups/opt_out <https://groups.google.com/groups/opt_out>.
[snippage]
Ralph Hipps
Oct 27, 2015, 2:22:35 PM10/27/15
to hbrob...@googlegroups.com
so I need to do this in both the bot and the laptop?
I have zerconf working, so the name works ok, I suppose ip address would as well.Ralph
. __o
. _`\<,_
. __o
. _`\<,_
(((((_)/ (_) SVTC!
------------------------------------------------------------------------------------
I don't know half of you half as well as I should like;
and I like less than half of you half as well as you deserve.
- J. R. R. Tolkien
------------------------------------------------------------------------------------
I don't know half of you half as well as I should like;
and I like less than half of you half as well as you deserve.
- J. R. R. Tolkien
------------------------------------------------------------------------------------
--
You received this message because you are subscribed to a topic in the Google Groups "HomeBrew Robotics Club" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/hbrobotics/M4-h7B7PUfk/unsubscribe.
To unsubscribe from this group and all its topics, send an email to hbrobotics+...@googlegroups.com.
Ralph Hipps
Oct 27, 2015, 2:26:02 PM10/27/15
to hbrob...@googlegroups.com
Wayne,
I would agree about ip vs naming, and I have zeroconf working, at least on my laptop.sudo apt-get install libnss-mdns
Ralph
. __o
. _`\<,_
. __o
. _`\<,_
(((((_)/ (_) SVTC!
------------------------------------------------------------------------------------
I don't know half of you half as well as I should like;
and I like less than half of you half as well as you deserve.
- J. R. R. Tolkien
------------------------------------------------------------------------------------
I don't know half of you half as well as I should like;
and I like less than half of you half as well as you deserve.
- J. R. R. Tolkien
------------------------------------------------------------------------------------
--
You received this message because you are subscribed to a topic in the Google Groups "HomeBrew Robotics Club" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/hbrobotics/M4-h7B7PUfk/unsubscribe.
To unsubscribe from this group and all its topics, send an email to hbrobotics+...@googlegroups.com.
Visit this group at http://groups.google.com/group/hbrobotics.
For more options, visit https://groups.google.com/d/optout.
Ralph Hipps
Oct 27, 2015, 2:26:49 PM10/27/15
to hbrob...@googlegroups.com
sent too soon....
do I need to do this on the Pi?
do I need to do this on the Pi?
Placing
export ROS_HOSTNAME=`hostname`.local
into your `.bashrc` file should do the trick.
Ralph
. __o
. _`\<,_
. __o
. _`\<,_
(((((_)/ (_) SVTC!
------------------------------------------------------------------------------------
I don't know half of you half as well as I should like;
and I like less than half of you half as well as you deserve.
- J. R. R. Tolkien
------------------------------------------------------------------------------------
I don't know half of you half as well as I should like;
and I like less than half of you half as well as you deserve.
- J. R. R. Tolkien
------------------------------------------------------------------------------------

Ralph Gnauck
Oct 27, 2015, 2:51:23 PM10/27/15
to hbrob...@googlegroups.com
Ralph,
I think it should be set up like this:
in the PI .bashrc
export ROS_HOSTNAME=`hostname`.local
export ROS_MASTER_URI=http://`hostname`.local:11311
export ROS_MASTER_URI=http://`hostname`.local:11311
in your laptop .bashrc
export ROS_MASTER_URI=http://<PI-HOSTNAME>.local:11311
export ROS_HOSTNAME=`hostname`.local
export ROS_HOSTNAME=`hostname`.local
You need to know the host name of the PI so you can tell the PC that the PI is the master, so you need to change <PI-HOSTNAME> above to whatever you PIs host name actually is.
For example, my pi is named bv80bot,
so my PCs .bashrc has
export ROS_MASTER_URI=http://bv80bot.local:11311
export ROS_HOSTNAME=`hostname`.local
export ROS_HOSTNAME=`hostname`.local
Ralph
From: Ralph Hipps <ralph...@gmail.com>
To: "hbrob...@googlegroups.com" <hbrob...@googlegroups.com>
Sent: Tuesday, October 27, 2015 11:26 AM
Subject: Re: [HBRobotics] Re:Neato Node On Raspberry Pi Experiment success.
To unsubscribe from this group and stop receiving emails from it, send an email to hbrobotics+...@googlegroups.com.
Ralph Hipps
Oct 27, 2015, 8:27:45 PM10/27/15
to HomeBrew Robotics Club
Ralph/Wayne/Camp,
Thanks!
we're making progress!!
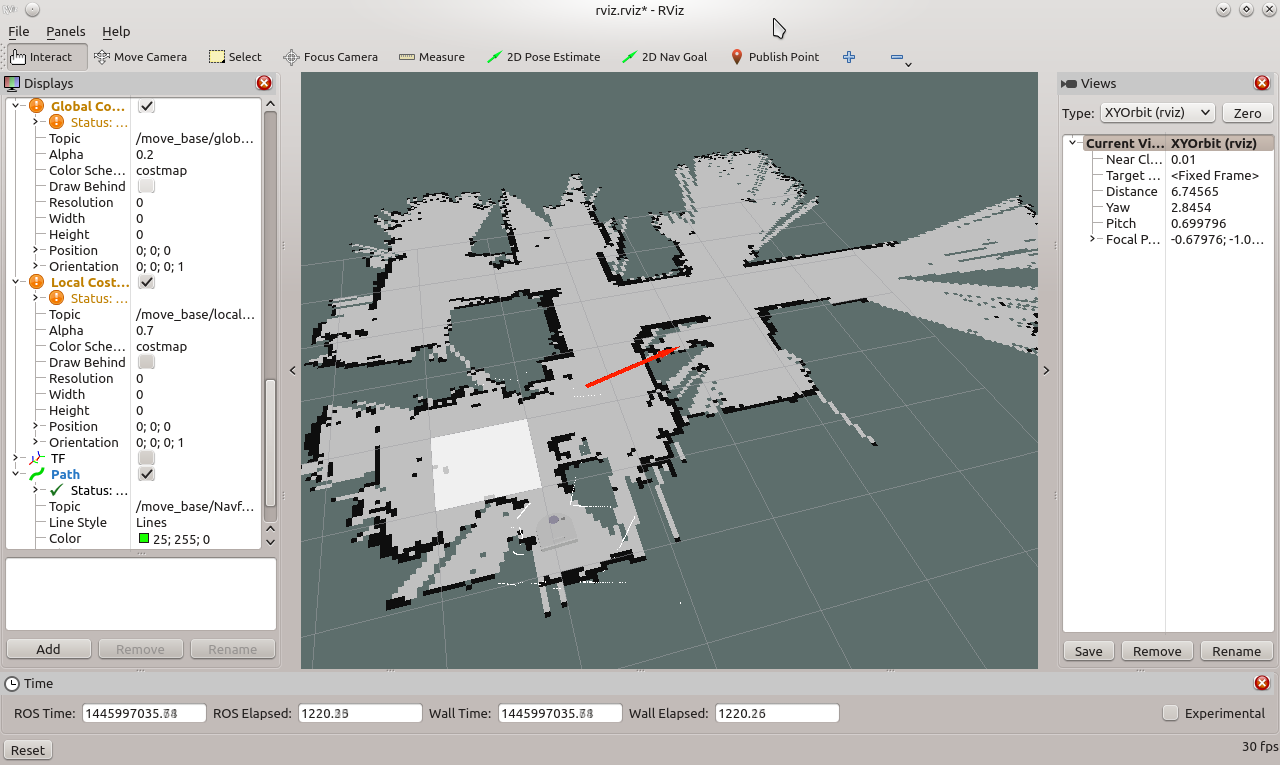
I added the envars to my laptop .basrc (already there on the Pi), and rebooted. Ran this and got the attached, showing lidar data in rviz:
Thanks!
we're making progress!!
I added the envars to my laptop .basrc (already there on the Pi), and rebooted. Ran this and got the attached, showing lidar data in rviz:
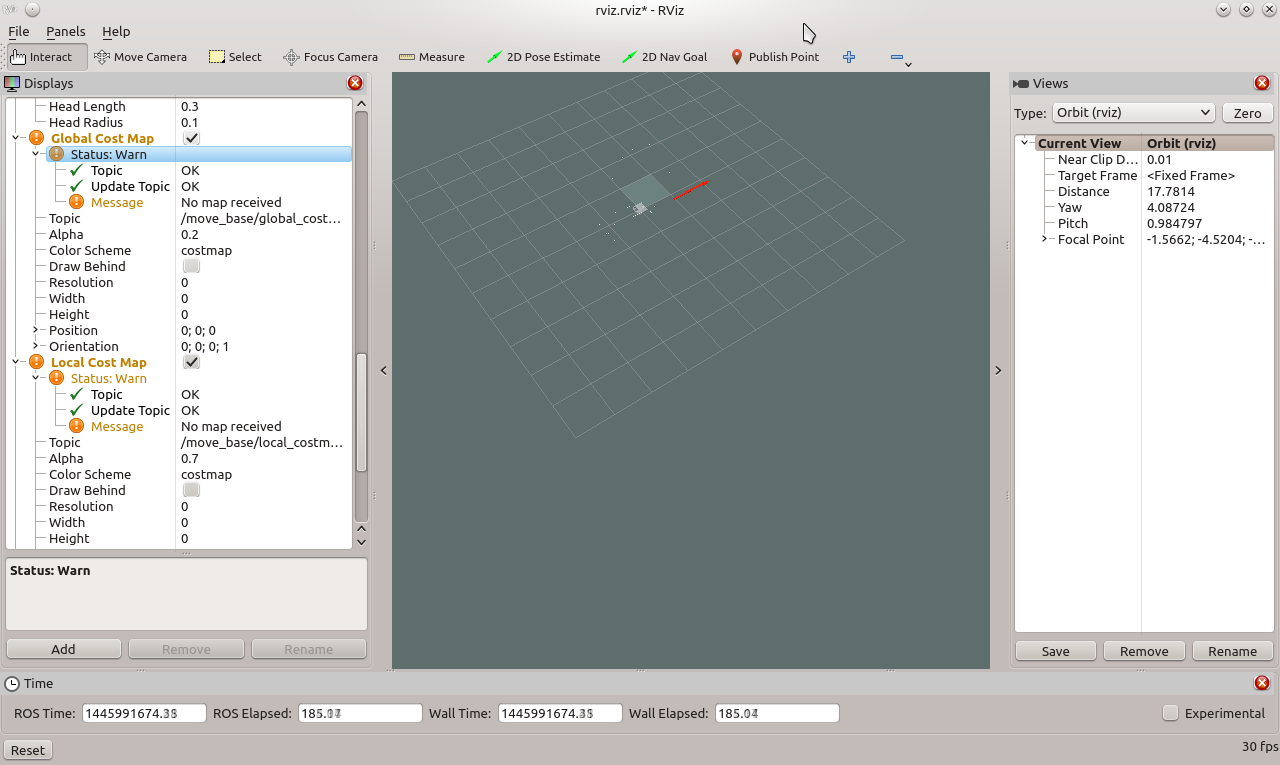
Launch the ros packages for mapping on the robot: on the Raspberry PI -- roslaunch bv80bot_node bv80bot_base_map.launch on the PC/Laptop -- roslaunch bv80bot_node bv80bot_gui_only.launch
I see warnings about no local/global cost maps received....
Should I be doing this instead? not sure yet exactly what the difference is:Launch the ros packages for mapping on the PC/Laptop: on the Raspberry PI -- roslaunch bv80bot_node bv80bot_base_only.launch on the PC/Laptop -- roslaunch bv80bot_node bv80bot_map_gui.launch
still can't teleop either, seems the connection to the dongle is just dead.
Won't link to the controller, but it's perfect in windows. I'll dig around....
Ralph Hipps
Oct 27, 2015, 8:31:18 PM10/27/15
to HomeBrew Robotics Club
not sure what this is about either:
core service [/rosout] found
process[rviz-1]: started with pid [2466]
**-->Bus::open: Can not get ibus-daemon's address.
IBusInputContext::createInputContext: no connection to ibus-daemon
core service [/rosout] found
process[rviz-1]: started with pid [2466]
**-->Bus::open: Can not get ibus-daemon's address.
IBusInputContext::createInputContext: no connection to ibus-daemon
On Tue, Oct 27, 2015 at 11:25 AM, Ralph Hipps <ralph...@gmail.com> wrote:
do I need to install it on my Pi?Wayne,I would agree about ip vs naming, and I have zeroconf working, at least on my laptop.
sudo apt-get install libnss-mdns
*From:* Ralph Hipps <ral...@gmail.com>
Camp Peavy
Oct 27, 2015, 8:37:44 PM10/27/15
to hbrob...@googlegroups.com
Hello Ralph,
As far as teleop is concerned try teleop-twist-keyboard... I prefer to use the keyboard since I'm always monitoring the map on my screen... it's just one less thing to carry (the joystick that is).
- Camp
From: Ralph Hipps <ralph...@gmail.com>
To: HomeBrew Robotics Club <hbrob...@googlegroups.com>
Sent: Tuesday, October 27, 2015 5:31 PM
Subject: Re: [HBRobotics] Re:Neato Node On Raspberry Pi Experiment success.
export ROS_MASTER_URI=http://<PI- HOSTNAME>.local:11311
export ROS_HOSTNAME=`hostname`.local
You need to know the host name of the PI so you can tell the PC that the PI is the master, so you need to change <PI-HOSTNAME> above to whatever you PIs host name actually is.For example, my pi is named bv80bot,so my PCs .bashrc has
export ROS_MASTER_URI=http://192.168. 43.134:11311
Ralph Hipps
Oct 27, 2015, 9:02:14 PM10/27/15
to HomeBrew Robotics Club
Camp,
I'll try that.
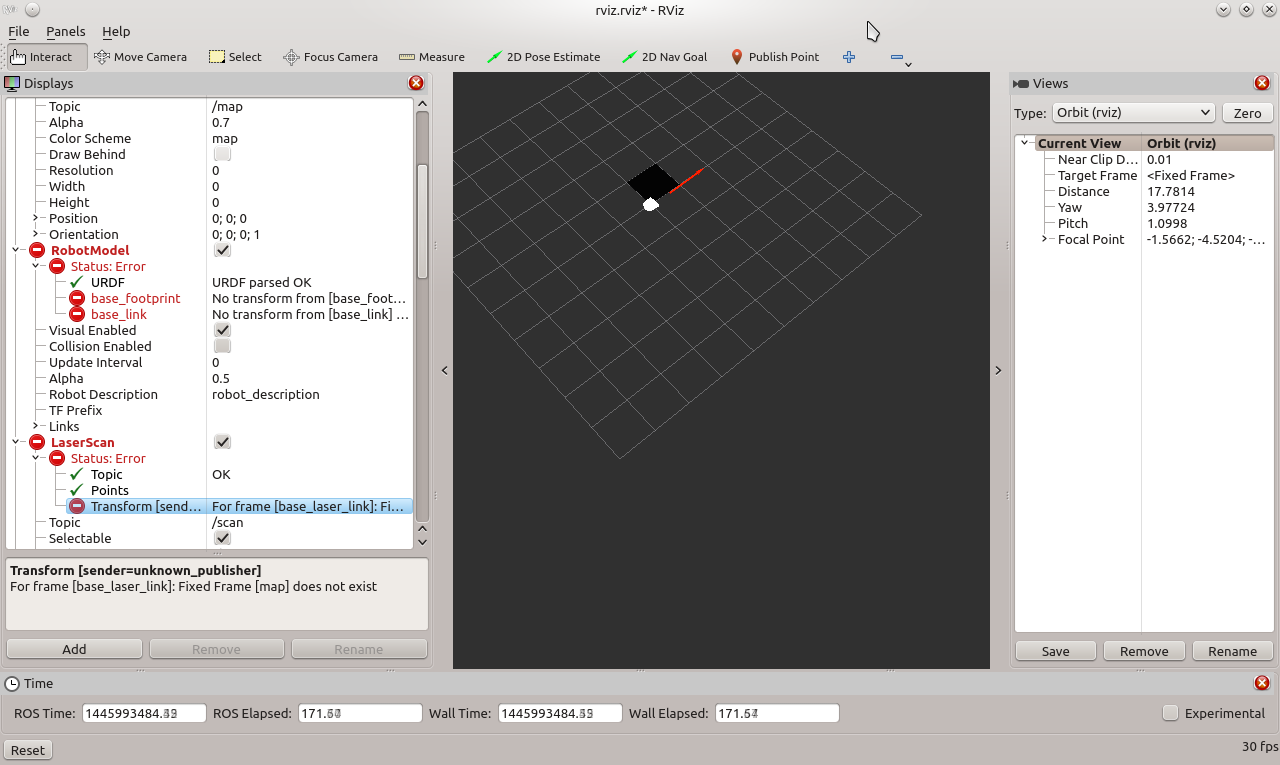
another interesting data point, when I try the second approach (mapping on the PC) I get the attached, i.e. it doesn't work. But the mapping on the robot approach does. Hm....
is that expected?
I'll try that.
another interesting data point, when I try the second approach (mapping on the PC) I get the attached, i.e. it doesn't work. But the mapping on the robot approach does. Hm....
is that expected?
Ralph Hipps
Oct 27, 2015, 9:15:22 PM10/27/15
to HomeBrew Robotics Club
could the xbox joystick thing be a power issue? I'm plugging the dongle into the Pi USB port.
Ralph Gnauck
Oct 28, 2015, 12:10:29 AM10/28/15
to hbrob...@googlegroups.com
Ralph,
That looks like you have an old map on the PC.
Delete any map files on the PC and try again to run it on the PC.
Ralph
Sent: Tuesday, October 27, 2015 6:52 PM
Ralph Gnauck
Oct 28, 2015, 12:15:09 AM10/28/15
to hbrob...@googlegroups.com
The XBOX controller dongle should work on the PI, I use mine that way so I don't think there is any power issue. (providing your power regulator can deliver enough current for the pi and dongle)
From: Ralph Gnauck <ralp...@pacbell.net>
To: "hbrob...@googlegroups.com" <hbrob...@googlegroups.com>
Sent: Tuesday, October 27, 2015 9:10 PM
Camp Peavy
Oct 28, 2015, 12:37:18 AM10/28/15
to hbrob...@googlegroups.com
Interesting... I was able to do mapping on the Pi but it was very slow... much faster on the PC.
I monitor the ping rate (between the computer and Pi) because it can vary greatly. Can you see the "map" topic?
- Camp
Sent: Tuesday, October 27, 2015 6:02 PM
Camp Peavy
Oct 28, 2015, 12:38:07 AM10/28/15
to hbrob...@googlegroups.com
> I was able to drive around and map part of the house, cool beans!
YES!
Sent: Tuesday, October 27, 2015 6:52 PM

{kind=link}
{kind=link}
{kind=link}
Gloria DeFelix
Apr 4, 2019, 11:37:27 PM4/4/19
to HomeBrew Robotics Club
Howdy.
During the last HBRC Holiday Junk Exchange, I picked up a Neato Lidar with this printed on the PCB:
© 2012LDS RT INTERFACE, VORWERK290-0028 REV 9
My goal is to attach that Lidar to a Raspberry Pi 3 B+ on my robot.
I searched through old HBRC posts and I came across a thread started by Alan Federman back in 2013 with this subject line: "Neato Node On Raspberry Pi Experiment complete, I think."
That was really nice to find.
That thread has really good info.
Thanks Guys!
:-)
In that thread I came across a post by Janez Cimerman (back in 2015) to this link to a tutorial for hooking up a Neato Lidar to the Raspberry Pi 2:
ROS, Neato driver, Hecor SLAM on Raspberry Pi 2B – Tutorial
That tutorial points me to Rohan's Git for an "XV 11 Laser Driver":
xv_11_laser_driver
Here are my next steps:
1) I need to get a hold of the schematic for the Lidar I am holding (LDS - 2012 - REV 9).I need to understand the wiring so I can hook this up properly to the Raspberry Pi 32) Attempt to extrapolate Janez's Tutorial above and make it work on the Raspberry Pi 33) Need to figure out if Rohan's driver will work with the Neato Lidar version I have (LDS - 2012 - REV 9) on a RasPI 3B+
I'm sure I'll have a BUNCH of questions and will need a BUNCH of help as I attempt to do this.
Just giving you guys a head's up that I'm attempting to do this.
Not sure anyone will come across this post, so I plan to follow-up individually with Camp, Federman and Rohan - if and (most likely) WHEN I get stuck.
:-P
I'll update this thread as I work through this.
Cheers!
-Gloria DeFelix
Reply all
Reply to author
Forward
0 new messages