proposed clarification for FWF part of LAS 1.4 specification

Martin Isenburg

Lewis Graham
This will not work, I am afraid.
The laser beam bends when refracted at a (e.g. water) surface. The first order “wave walker” described in the LAS 1.4 specification handles this case (i.e. – the wave walker is local).
Regards,
Lewis
Lewis Graham
AirGon LLC, small UAS Solutions
GeoCue Group
9668 Madison Blvd., Suite 202
Madison, AL USA 35758
01-256-461-8289
--
--
You are subscribed to "The LAS room - a friendly place to discuss the the LAS or LAZ formats" for those who want to see LAS or LAZ succeed as open standards. Go on record with bug reports, suggestions, and concerns about current and proposed specifications.
Visit this group at http://groups.google.com/group/lasroom
Post to this group with an email to las...@googlegroups.com
Unsubscribe by email to lasroom+u...@googlegroups.com
---
You received this message because you are subscribed to the Google Groups "The LAS room - a friendly place to discuss the LAS and LAZ formats" group.
To unsubscribe from this group and stop receiving emails from it, send an email to
lasroom+u...@googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
Martin Isenburg
--
Download LAStools at
http://lastools.org
http://rapidlasso.com
Be social with LAStools at
http://facebook.com/LAStools
http://twitter.com/LAStools
http://linkedin.com/groups/LAStools-4408378
Manage your settings at
http://groups.google.com/group/lastools/subscribe
Martin Isenburg
Lewis writes: "Each bit of waveform (a waveform packet) has an anchor point. This anchor point is supposed to be synonymous with the point stored in the point data record. The X(t), Y(t) and Z(t) are the displacements with respect to time from this anchor point. They are really just the first order coefficients so maybe we call them constants xd, yd, zd.
So if the anchor point is X0, Y0, Z0 and I need to find the position of a “derived” point 10 picoseconds later, then I would simply have
This is the new paragraph I plan to propose:
dx, dy, dz: A local vector that specifies for each return the direction from where the laser light originates and the distance it traveled in picoseconds. Multiplying these local vectors with p picoseconds and adding them to the position x,y,z of the corresponding return allows traversing the sampled waveform through space. The position P of the waveform p picoseconds before its return is given by:
Px = x + p * dx
Py = y + p * dy
Pz = z + p * dz
The local vectors of all returns of a pulse are identical if the laser light travels a straight line, which is a valid assumption for most topographic surveys. The illustration in Figure OLD (not attached) gives a simple example of how three different returns of a laser pulse relate to their digitized waveform.
However, in bathymetric surveys the laser beam gets refracted as it hits the water surface. Here the traversal of the sampled waveform needs to be done in segments. Traverse only in direction of the local vector from the first return to the first waveform samples, traverse in direction of the local vector from the second to the first return and no farther, traverse only in direction of the local vector from the third to the second return and no farther, ... etc. Only the traversal from the last return to the last waveform sample can go in the opposite direction of the local vector as illustrated in Figure NEW (attached).
The units of dx, dy, and dz are per picosecond and identical to the units of the x, y, and z coordinates of the return.

{kind=link}
{kind=link}
Evon Silvia
Martin Isenburg
good point. I actually had it included in the graphic (note that the length of the vector in the water is shorter than the length of the vector in the air) but you are right it should also find its way into the text.
The speed of light in vacuum, commonly denoted c, is exactly 299,792,458 metres per second. The speed of light v at which light propagates through transparent materials such as air, water, or glass depends on the so the refractive index n of the material (n = c / v). For example, for visible light the refractive index of glass is typically around 1.5, meaning that light in glass travels at c / 1.5 ≈ 200000 km/s; the refractive index of air for visible light is about 1.0003, so the speed of light in air is about 90 km/s slower than c.
On Tue, Jul 14, 2015 at 7:23 PM, Peter Guth <pg...@usna.edu> wrote:
>
> Hi Martin,
>
> In addition to bending in the water, the speed of light also changes, so the dx,dy, and dz will be different in water and air. I don't see any indication of that in the proposed description.
> Peter L. Guth
> Professor, Dept Oceanography, USNA
Martin Isenburg
Evon Silvia
Martin Isenburg
dx, dy, dz: A delta vector that specifies for the associated return the direction from where the laser light originated and the distance it traveled in picoseconds. Multiplying these delta vectors with p picoseconds and adding them to the position x,y,z of their corresponding return allows traversing the sampled waveform through space. The position P of the waveform p picoseconds before its return is given by:
Px = x + p * dx
Py = y + p * dy
Pz = z + p * dz
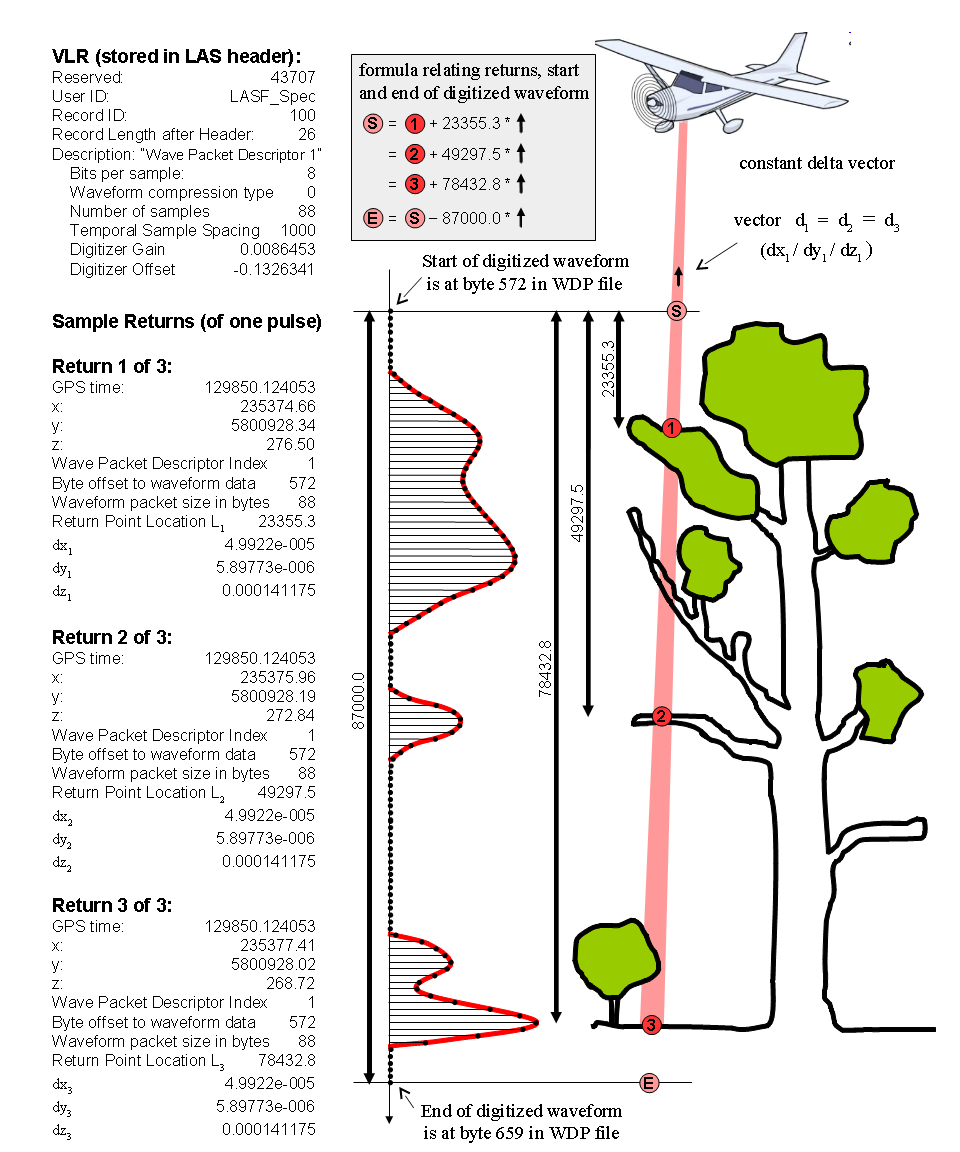
The delta vectors of all returns of one pulse remain constant if the laser light travels a straight line, which is a valid assumption for most topographic surveys. The illustration in Figure CONSTANT (attached) gives a simple example of how three different returns of a laser pulse relate to their digitized waveform.
In a bathymetric survey the laser beam may get refracted when it hits the water surface and change both direction and speed. By storing changes in the delta vector with each return it is possible to store the result of a refraction calculation to the LAS file. In this case the traversal of the sampled waveform needs to be done in segments as illustrated in Figure CHANGING (attached):
* use the delta vector of the first return to traverse from the first return to the the start of the waveform sampling,
* use the delta vector of the second return to traverse from the second to the first return,
* use the delta vector of the third return to traverse from the third to the second return,
* ...
* only the reversed delta vector of the last return to traverse from the last return to the end of the waveform sampling.
The units of dx, dy, and dz are per picosecond and identical to the units of the x, y, and z coordinates of the return.
{kind=link}
{kind=link}
Evon Silvia
- use the delta vector of the last return to traverse from the last return to the second-to-last return or in reverse to the end of the waveform sampling
Martin Isenburg
That said, the graphics and language surprised me with the implied sign of dx/dy/dz. I would have expected the dx/dy/dz values to be positive along-pulse – i.e., from the origin (sensor) and toward the points. Is that not the case?
Martin Isenburg
I am putting forward a motion to make a small revision of the current specification (LAS 1.4 r13) for more clarity in the specification of the FWF part. In particular this will add the two attached example illustrations (also available as PDF or SVG). These changes were discussed in these public forums:
============================
I propose the following change for clarity in the FWF part of the LAS 1.4 specification. This is because all 4 major vendors (RIEGL, Optech, Trimble, and Leica) had wrongly implemented their FWF exporters in their latest LAS 1.3 / LAS 1.4 writers due to miss-understanding the specification. The suggested change is relative to this LAS document here:
http://www.asprs.org/a/society/committees/standards/LAS_1_4_r13.pdf
=================
This is the original (page 14/15):
Return Point location: The offset in picoseconds (10-12) from the first digitized value to the location within the waveform packet that the associated return pulse was detected.
X(t), Y(t), Z(t): These parameters define a parametric line equation for extrapolating points along the associated waveform. The position along the wave is given by:
X = X0 + X(t)
Y = Y0 + Y(t)
Z = Z0 + Z(t)
where X, Y and Z are the spatial position of the derived point, X0, Y0, Z0 are the position of the “anchor” point (the X, Y, Z locations from this point’s data record) and t is the time, in picoseconds, relative to the anchor point (i.e. t = zero at the anchor point). The units of X, Y and Z are the units of the coordinate systems of the LAS data. If the coordinate system is geographic, the horizontal units are decimal degrees and the vertical units are meters.
This is the proposed rewrite:
Return Point Location: The offset in picoseconds (10-12) from the start of the digitized waveform to the location (measured in time) within the digitized waveform that the corresponding return was detected.
dx, dy, dz: A delta vector that specifies for the associated return the direction from where the laser light originated and the distance it traveled in picoseconds. Multiplying these delta vectors with p picoseconds and adding them to the position x, y, z of the corresponding return allows traversing the digitized waveform samples through space. The position P_x, P_y, P_z of the waveform t picoseconds before its corresponding return is given by:
P_x = x + t * dx
P_y = y + t * dy
P_z = z + t * dz
The delta vectors of all returns of one pulse remain constant if the laser light travels a straight line which is a valid assumption for most topographic surveys. The illustration in Figure 1 (attached) gives a simple example of how three different returns of a laser pulse relate to their digitized waveform.
In a bathymetric survey the laser beam may get refracted when it hits the water surface and change both direction and speed. By storing changes in the delta vector with each return it is possible to store the result of a refraction calculation to the LAS file. In this case the traversal of the digitized waveform needs to be done in segments as described below and as illustrated in Figure 2 (attached):
* use the delta vector of the first return to traverse from the first return to the the start of the digitized waveform,
* use the delta vector of the second return to traverse from the second to the first return,
* use the delta vector of the third return to traverse from the third to the second return,
* ...
The units of dx, dy, and dz are per picosecond and identical to the units of the x, y, and z coordinates of the return. The two illustrations in Figures 1 and 2 show the space-optimized case where a single digitized waveform is stored that is then referenced by all its returns. It is also possible to store a separate digitized waveform for each return, either by storing the exact same digitized waveform multiple times or by storing only the section of the digitized waveform that is relevant for the corresponding return.
==================
Obviously the corresponding entries in Tables 13, 14, 20, and 21 also have to be changed from x(t), y(t), z(t) to dx, dy, dz.
Regards,
Martin
{kind=link}
{kind=link}